

你很快会判断:这不是垃圾,不能清走。
不是因为你背过这条规则,而是因为你理解这个场景——球、拍子、人存在明显的关联关系,主人还在旁边,东西还在被使用。
但今天的城市扫地机器人,大多不具备这种理解力。它们要么“看见就扫”,造成误扫;要么被规则写成“运动器材不扫”,留下新的盲区。
深究根本问题,不是算得不够快,而是缺了一层“场景理解”。
今天,库萨科技发布两大核心技术成果:自研全模态具身模型 Kusa Omni-CTS,以及自研操作系统 Kusa OS。前者让机器人试着理解场景,后者确保这种理解来得及执行。
这也是库萨第一次系统公开其城市服务具身智能技术架构。过去外界更多通过无人清扫机器人认识这家公司,而这次发布揭示了它的底层技术路线:以真实城市为训练场,把模型、操作系统、多形态机器人和规模化部署接进同一套系统。
01.
具身智能扎堆室内,城市开放场景仍是硬骨头
如果你留意过当前的具身智能行业,会发现一个明显的现象:绝大多数企业的训练场景和技术展示,多集中在工厂、仓库和实验室。这些场景有清晰的边界、稳定的光照、可预测的任务流程,变量少,容易出成果。
但城市服务场景,几乎是这一切的反面。道路边界往往没有清晰标线,路面混合着沥青、地砖、碎石和泥土;行人、自行车、机动车随时可能进入作业区域;落叶、石块、纸张等散落在一起;雨水、强光和扬尘等环境因素,也会持续干扰机器人的感知与判断。
更麻烦的是清扫任务的的双重需求。车身需要避开行人和车辆,作业部件又必须贴近路沿、树池边缘和墙角。机器人要在同一时刻作出两类判断:什么该让,什么该贴,贴多近才刚好扫干净。
传统无人清扫方案通常由自动驾驶底盘与清扫上装组合而成。底盘解决“怎么走”,清扫机构解决“怎么扫”,但感知、任务理解和物理动作之间的联系还不够紧密。再想想开头那只羽毛球——机器人可能识别出“前方有一颗羽毛球”,却无法综合附近的物品、人员、时间和环境状态,进一步判断这只球该不该扫。
城市服务因此成为检验具身智能场景理解能力的高难度现场。库萨此前曾将自己的研发思路概括为“以场景定义产品”。此次发布的模型与操作系统,也延续了这一路线:由城市开放环境的实际问题,反向定义机器人需要具备的能力。
02.
Kusa Omni-CTS:规则之外,还要理解物理世界
城市服务场景的复杂性,决定了它不能单靠堆规则来解决。
“规则驱动”的基本逻辑是遇到A情况,执行B动作。但城市里的物品关系、人员行为和道路环境持续变化,规则库很难覆盖所有组合。任何一个未被写入的长尾情况,都可能成为新的风险点。
库萨给出的路线,是让模型从“背诵规则”转向“理解物理世界”。这次发布的全模态具身模型Kusa Omni-CTS重点补上了三项能力。
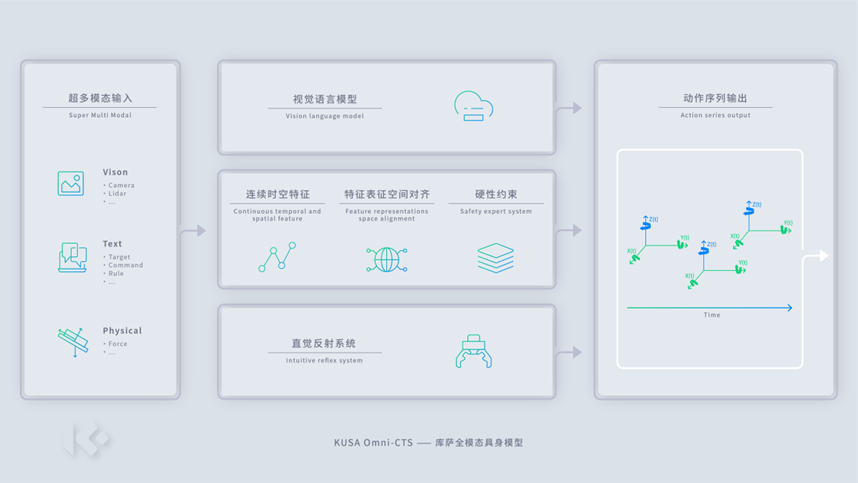
第一,让模型不止“看见”,还能感知自己的身体
真实的世界需要真实的触摸,视觉+语言对场景的理解仍不够充分。它能认出“这是一个垃圾桶”,也能理解“把这里扫干净”的指令,但它感受不到自己碰到垃圾桶时的力度、地面的摩擦力、以及手臂接近极限扭矩时的那种吃力感。
视觉数据告诉机器人“前方是路沿”;本体数据反映“扫刷已经接触路沿,电机负载正在上升”;语言信息则提供“完成贴边清扫,同时保证设备与环境安全”等任务约束。
三类信息互相校验,机器人由此可以结合外部环境与自身状态作出判断。通俗地说,机器人不再只“看着做”,还会结合接触、负载和姿态“摸着做”。
第二,让不同节奏的数据不再“强行对表”。
这是一个多传感器融合中隐藏在工程深处、卡住无数团队的难题。
机器人身上的传感器以不同频率运行。触觉、IMU和轮速等本体感知数据通常处在200Hz至1000Hz,相机约为30Hz,激光雷达可能只有10Hz。
传统方案往往依赖严格的硬件时间同步。一旦出现时钟漂移、触发延迟或局部丢帧,融合结果就可能受到明显影响。
Kusa Omni-CTS 不再依赖这种硬件硬同步,采用连续时空表征,将不同频率的数据映射到连续时间轴,在模型内部完成异步特征对齐。由此,视觉、语言、触觉各自按自己的节奏采集信息。就像一支爵士乐队,不需要指挥棒统一打拍子,每个声部按自己的韵律进来,音乐反而更有生命力。
当相机视场、激光雷达线数或传感器精度发生改变时,模型还可以通过少量自适应微调,适配新的传感器组合与作业场景。
第三,让机器人在脑子里“先试一遍”。
这是 Kusa Omni-CTS 最接近人类思维的一项能力:反事实推演。
它把机器人的动作序列纳入环境预测。模型在做决策前,会在虚拟空间里做“What-if”——如果我这样走,那个行人会不会受惊?如果我这样扫,这块碎石会不会弹起来?不安全,就换一种方案。推演通过,再付诸行动。
这不是预测画面,是预测物理世界。每一次推演都受动力学约束,有惯性、有摩擦、有机器人自身的极限。这让机器人在开放场景中的决策,拥有更明确的物理依据。
03.
同一组物品场景,两次不同的判断
一个具体场景,可以更直观地展示这种场景理解能力如何影响机器人的最终判断。
傍晚,园区步道。机器人识别到一个敞开的双肩书包、散落在旁的草稿纸、一支铅笔,三米外有学生跑动。
在Kusa Omni-CTS 模型内部,空间关联与时间上下文同时被激活:书包是容器,纸和铅笔是内容物,学生是使用者。模型自动推演出一个结论——这是“放学场景”,物品仍在被使用。
模型输出:暂不清扫,疑似学生用品。
次日清晨,纸和铅笔仍在原处,书包和周围人员已经消失。模型再次判断时,原有的关联锚点和人员活动都已不存在,时间背景也由放学时段变成隔夜遗留。
输出结果随之变化:执行清扫,判定为无人认领的遗留物品。
同一张纸,同一支铅笔。两次截然不同的命运。
不是因为程序里写了一条“书包旁边的纸不扫”,而是模型理解了这些物品与书包的关系、与人的关系、与时间的关系。它判断的不是“这是什么”,而是“这里正在发生什么”。
这就是从“背诵规则”到“理解无路”的差别。
当然,一个案例还不足以证明模型已经解决所有城市长尾问题。Kusa Omni-CTS的实际价值,最终仍要通过误扫率、漏扫率、人工接管频次、复杂环境稳定性和跨场景泛化能力等指标检验。
但它至少把城市服务机器人的竞争推进到更深的一层:机器人要理解物体,也要理解物体所处的情境。
04.
Kusa OS:让“理解”快到来得及执行
理解了场景,还要及时行动。
在城市场景里,危险往往在毫秒之间出现——突然冲出的行人、被风吹来的障碍物、湿滑路面上即将发生的侧滑。如果模型推理出了“紧急制动”,但操作系统线程正被一个日志任务卡住,那再聪明的判断也等于零。
这正是库萨同步发布Kusa OS的原因。
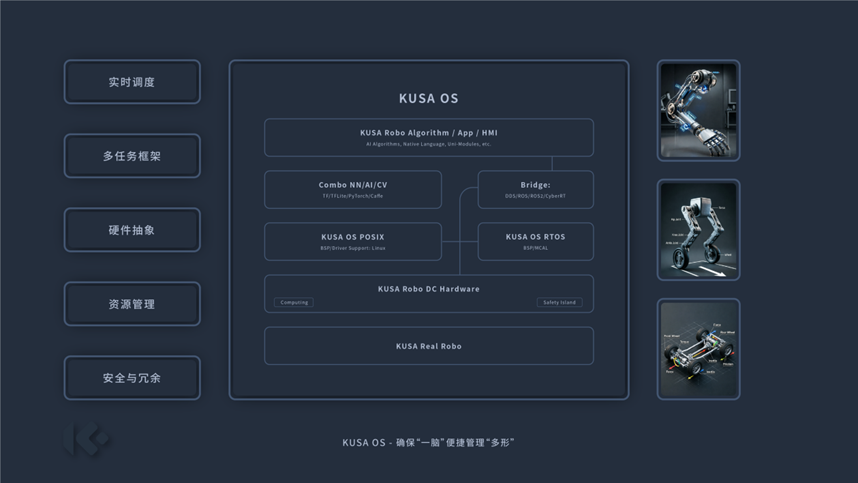
Kusa OS是面向具身智能的专用操作系统,专为边缘侧高实时性、高可靠性的多任务调度场景设计。其核心指标是系统时延小于1毫秒,关键控制回路的抖动控制在50微秒以内。这里的重点在于确定性:当感知、规划、通信等任务争夺计算资源时,紧急制动等硬实时任务必须始终获得最高优先级。
对于开发者,Kusa OS试图把底层的麻烦事都扛下来。
它提供统一的硬件抽象接口,不同品牌的相机、激光雷达、毫米波雷达、IMU和定位设备,插上就能认,换传感器像换USB一样简单,不用重写代码。算法模块可以灵活组合,资源由系统智能分配。当关键任务发生超时或异常时,系统自动触发安全降级,使机器人进入预设的安全状态。
Kusa OS的另一项核心能力是“一脑多形”,同一套系统,可以适配并指挥形态、大小各异的城市服务机器人。目前,库萨已经形成覆盖0.5吨、1.5吨和3吨级的产品矩阵,从小型公共空间到市政道路,同一套操作系统完成适配。
这套系统的技术基础,来自库萨核心团队自2018年起的持续积累。团队先后历经自动驾驶、车规芯片、机器人三大体系的落地验证,随着库萨机器人的落地,已在超过40座城市的复杂环境中持续接受考验。
05.
城市服务机器人的“大脑”,开始有了自己的原生架构
当前,具身智能行业正在经历一轮认知升级:从比“谁跑得更快”,转向比“谁在真实世界里更可靠”。
库萨这次发布的 Kusa Omni-CTS 和 Kusa OS,本质上是在回答同一个问题:一个需要在户外、开放、非结构化环境里长年稳定工作的机器人,它的“大脑”应该长什么样?
他们给出的答案是:全模态感知,物理级推演,实时级执行。
现在,库萨把技术扎进城市服务场景,并通过40多座城市的实际部署持续验证。这条路线未必最耀眼,却足够具体,也更接近城市服务机器人规模化落地需要解决的真实问题。

 VIP复盘网
VIP复盘网
