


具身智能正在经历一段奇特的“分裂时期”。
从发布节奏来看,VLA架构持续演进,大模型参数规模月月刷新,机器人的新品发布几乎让人产生了审美疲劳;但从真实落地来看,只要把机器人放进非结构化的真实场景,接触类任务依然普遍笨拙,比如抓取易滑脱、装配对不准、薄片物体一夹就变形或掉落。
这种“看得懂场景、做不到动作”的落差,正在把行业讨论的重心从模型和本体悄悄转向一个此前不太被普遍关注的环节——训练数据,尤其是物理接触类数据的极度稀缺。
01.
“数据饥渴”正在卡脖子
那么,数据荒到底有多严重?
数据量是第一道坎。从量级来看,与大语言模型动辄几千万小时的视频数据、几十万亿token的文本数据不同,当前国内可用于具身模型训练的数据大约只在百万小时量级,而其中能真正支撑精细操作任务训练的高质量触觉数据,更是稀缺中的稀缺。
数据采集成本是另一道更现实的门槛。行业平均数据采集成本约为每小时100元至150元,如果要采集100万小时数据,光是采集成本就高达1亿元至2亿元。面对如此高昂的成本,有业内人士直言:真机遥操作数据这条路,可能走不下去了。
更棘手的是,现有数据还面临严重的流通性困境。不同训练基地,基于不同机器人本体各自采集数据,形成了明显的数据孤岛,难以复用、难以共享,行业整体的数据积累效率大打折扣。
三层困境叠加,揭示出一个正在被行业逐渐接受的判断:真正制约具身智能发展的瓶颈,不是“有没有在采数据”,而是有没有高质量、可规模化的数据采集能力。芯片可以多买,模型可以重训,但物理世界的真实交互数据只能一分一秒地采集积累。
正是在这样的行业背景下,千觉机器人给出了自己的全新答卷,在具身智能的赛道竞速中抢得了宝贵的时间窗口。
02.
一只夹爪,如何把人手变成具身智能的数据入口
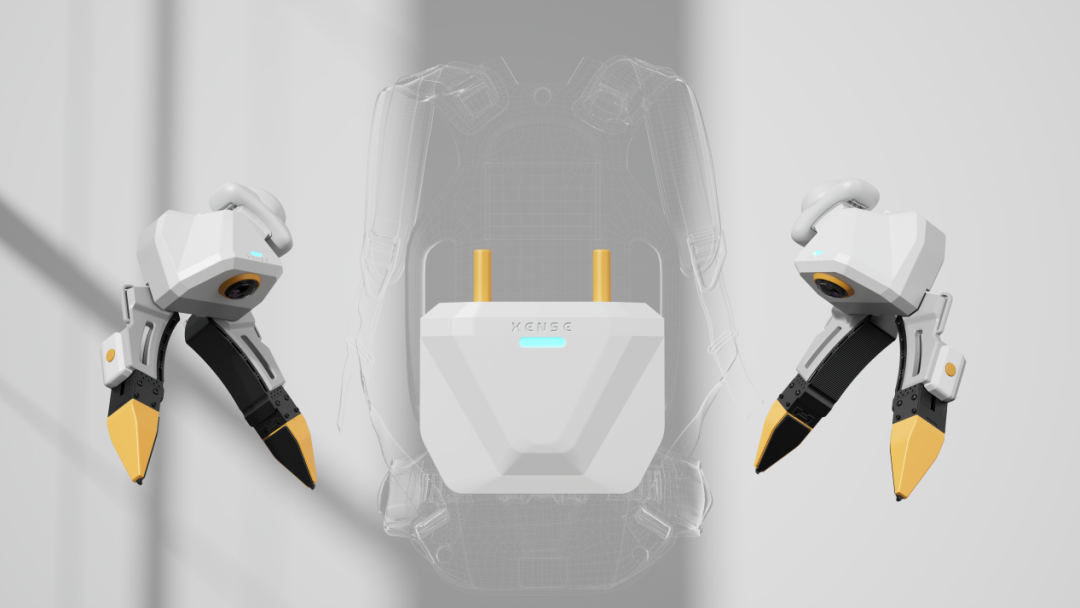
近日,千觉机器人正式推出全新升级的XTac UMI G1穿戴式触觉多模态数据采集夹爪。
这款产品的原型最早于2026国际机器人与自动化大会(ICRA)完成全球首次亮相,凭借贴合真人操作的采集模式与完整的触觉感知能力,成为展会现场海内外高校科研团队与具身算法团队关注的焦点之一。
历经多轮工程优化与场景实测后,这款备受关注的产品正式对外发布。
而要真正理解XTac UMI G1的价值,需要先理解产品本身。
视频来源:千觉机器人官方视频号
在系统构成上,产品由穿戴式主端、机器人从端、采集背包与高帧率三色光视触觉传感器四个部分组成。人类操作者佩戴主端进行自然夹取动作,机器人从端同步复现动作轨迹,视触觉传感器实时捕捉接触信息,采集背包统一处理和存储数据流。
整套系统的核心逻辑是“主从同步 多模态同采”,旨在把人手的每一次自然操作,变成高质量结构化数据的生产动作。
在核心感知层面,产品集成千觉自研的120Hz高帧率三色光视触觉传感器与200Hz IMU模组,可实现5ms级多设备时序同步、3mm级空间定位精度,同步采集RGB图像、视触觉图像、6DoF位姿轨迹、夹爪开合状态及9轴IMU惯性数据,各模态数据经时序对齐后形成结构清晰、可回放、可验证、可复用的标准化数据资产。
时序对齐的重要性往往容易被忽视——视觉帧和触觉信号之间哪怕存在细微的时间偏差,都会干扰模型对操作因果关系的正确学习。
采集内容的质量层级,是XTac UMI G1最核心的产品价值所在。传统数采方案大多仅能记录视觉与位姿数据,无法捕捉接触形变、压力分布、物体滑移等关键物理交互信息,导致机器人“看得见动作、不懂交互逻辑”。而XTac UMI G1采集的数据,不再只停留在“看到手在动”的层面,而是能够进一步描述“是否接触、哪里接触、如何接触、接触是否稳定”——接触区域的实时变化、夹持稳定性、滑移趋势,这些原本难以量化的物理细节,被系统性地转化为可训练数据,填补了视觉数据和仿真数据最无力覆盖的信息层。
在操作形态上,穿戴式设计相比传统真机遥操作方案更轻量、易部署,无需搭建专用遥操作场地;相比扳机式夹爪交互,穿戴形态更贴近人手自然夹取动作,采集人员几乎零门槛即可上手,可连续完成抓取、搬运、整理、插拔、薄片夹取等多类操作任务。其端部采用细巧柔顺的指尖结构设计,进一步提升了对小物件、薄片、边缘物体等复杂目标的接触适应性,让采集数据能够覆盖更贴近真实应用的精细操作场景。
在数据生态层面,产品原生兼容LeRobot、MCAP等主流工具链,打通了从采集、管理、标注、回放到数据集构建的完整流程,大幅降低团队从采到数据到用上数据的工程门槛。
在部署弹性上,XTac UMI G1可在实验室、办公桌面、家庭与真实工业产线等多类场景中灵活部署,从早期算法验证阶段的小规模采集,可持续扩展到数千小时、数万小时乃至更大体量的机器人操作数据集建设,成本可控性远优于传统真机遥操作方案。
从视触融合感知到轻量化部署,从高精度数据输出到主流生态的无缝对接,XTac UMI G1展现出了强大的数据采集能力——是真正可以被投放到真实场景中、持续产出标准化数据资产的采集工具。
那么,XTac UMI G1又能在哪些环节发挥其真正的价值?
03.
在真实场景中,把每一次演示变成可复用的数据资产
XTac UMI G1覆盖的应用场景,基本贯穿了当前具身智能产业链上对操作数据最迫切的几类需求。

在产业链最上游,是面向多工位、多人员、多任务的大规模具身数据工厂。数据工厂的逻辑很直接:如果高质量物理交互数据是当前最紧缺的生产资料,那么能够批量、标准化地生产这种数据的能力,本身就具备极强的商业价值。XTac UMI G1凭借轻量化部署、可批量复制的产品特性,充分适配数据工厂的规模化扩张需求,能够持续产出可回看、可验证、可复用的多模态数据资产。
在产业链中游,是机器人公司、高校实验室和具身智能团队的算法研发平台。这类用户对数据质量和格式兼容性的要求极高,核心需求是数据清洗、质量评估、任务复现与模型数据准备。XTac UMI G1依靠结构化输出与适配主流工具链的原生设计,直接降低了这类场景的数据接入门槛,让团队更快地把采集结果转变为可用的训练资产。
在产业链下游,是服务机器人和工业机器人的真实落地场景。服务端,XTac UMI G1可采集桌面整理、物品取放、容器开合、工具使用等日常操作数据,覆盖贴近真实生活环境的任务样本;工业端,XTac UMI G1则能够面向3C装配、小件分拣、线缆插拔、零件取放等任务,沉淀动作、位姿与接触信息完整的操作数据,为柔性制造提供持续的数据基础;科研侧,XTac UMI G1在连续真实任务中通过采集视触觉数据,为接触状态理解、触觉表征和触觉基础模型研究提供数据来源。
在这些具体落地层面,XTac UMI G1展现出了极强的场景穿透力,勾勒出一幅较为完整的应用图谱。
而将所有这些场景串联起来的,是XTac UMI G1提供的一种共性价值:它交付的不是一次性素材,而是可持续积累、可复用扩展的数据资产。
这正是产品的独特之处,它改变了机器人操作数据的生产逻辑,将人工操作演示、动作同步、多模态采集和训练链路接入放在同一系统中,缩短了从操作演示到模型训练之间的链路,减少了硬件、传感、格式和训练工具之间的割裂,把人手的每一次演示转化为可持续积累的数据资产。
数据不再只是“可以观看的视频”,而是记录了“看到什么、怎么接触、如何移动、结果如何”完整因果链条的物理交互档案,真正让机器人训练数据从“可观看”走向“可理解”。
对于正在从“单点演示”走向“规模化数据建设”的行业来说,这样的产品更像是一块基础设施,而不是一件孤立的设备。
04.
结语与未来
具身智能的“数据饥渴”正在被逐步正视,而触觉数据的规模化采集,正是这场变革中不可或缺的一环。当训练数据的质量天花板直接决定了模型能力的上限,数据采集基础设施的重要性将与模型和本体本身同等重要,甚至更加紧迫。
千觉XTac UMI G1选择在这个时间节点上市,是一个关于“数据入口”的清晰押注——不做模型,不做本体,专注于把人手的每一次自然操作,变成机器人可以真正学习的高质量触觉数据。

 VIP复盘网
VIP复盘网
