


英伟达近期重磅发布的世界动作模型 DreamZero 一经发布就在两项机器人基准测试 RoboArena 、MolmoSpaces 上双双登顶,在具身智能领域获得极大关注。如今,李飞飞、杨立昆近期都已押注世界模型,Google、OpenAI等AI巨头均已将世界模型作为通往下一代智能的潜在路线。
但具身智能领域仍正经历一场关于路径的激烈争论,大家对世界模型,究竟能不能打开具身机器人的新路径各执一词。
乐观派认为,只要世界模型能够充分理解物理规律、预测动作后果,机器人便能在虚拟仿真中完成大规模预训练,再迁移到真实场景。持怀疑态度的人则指出,机器人最终要在真实物理世界中拿起一个鸡蛋、拧开一个瓶盖、插入一根针。这些操作的物理细节,当前的仿真环境根本无法精确复现。
机器人大讲堂发现,这场争论的本质,其实依然是一个数据问题。世界模型和VLA模型的能力上限,由训练数据的质量与密度共同决定。而当前最稀缺的,不是摄像头数据,也不是语言指令,而是如何大规模拿到在真实物理交互中产生的高精度感知-动作配对数据。

卡点在哪里?在手。准确说,是在末端执行器的感知能力上。
机器人的视觉系统可以“看懂”一个任务。做到例如识别物体、规划路径,但当手指真正接触物体的瞬间,视线往往被遮挡。抓得太紧会损坏,太松会滑落;插拔接口需要毫米级的力反馈;拧转螺栓依赖的是对扭矩的实时感知,而非摄像头。这是纯视觉感知的天然盲区,也是当前绝大多数灵巧手无法跨越的鸿沟。
触觉感知,正是填补这道鸿沟的关键基础设施。它让模型不仅能“看懂任务”,更能“摸透物理”。而触觉数据只能在真实环境中采集,仿真难以精确复现,这意味着,谁率先掌握高密度、高精度的触觉感知硬件,谁就在为未来的具身大脑建造最稀缺的数据入口。
01.
星动纪元的触觉答案:XHAND 1 Pro
2026年6月,作为全球研究世界模型最顶尖梯队的企业,星动纪元此时对外发布了XHAND 1 Pro。这款被定位为「大脑手」的科研级五指灵巧手,承载的信息量远超一款硬件产品本身。
感知密度方面,XHAND 1 Pro整手搭载18个分布式触觉传感器,覆盖指尖×5、指腹×10、掌心×3,实现全掌范围的三维力感知。传感器采用电容式压力方案,测力区间0.1–25N,分辨率0.01N,这意味着产品能够感知0.1N量级的微小接触力变化,远超人类皮肤的平均触觉阈值。同时,产品支持厘米级非接触预检测(接近觉10mm),在手指尚未接触物体时便可开始预判接触力分布,实现柔顺控制和抓取轨迹优化。这套感知配置,就是为高质量数据采集而设计。

执行精度方面,XHAND 1 Pro采用21自由度全直驱架构,侧掌搭载独立自由度,五指最大展开角度135°,最大包络抓握直径160mm,可单手抓取啤酒杯、篮球等大尺寸物体。单关节背隙小于±0.25mm,重复定位精度Pitch关节±0.1mm,配合双编码器设计,通过混合控制算法动态补偿齿轮背隙与传动空程误差,进一步提升数据采集真实度与模型执行精度。
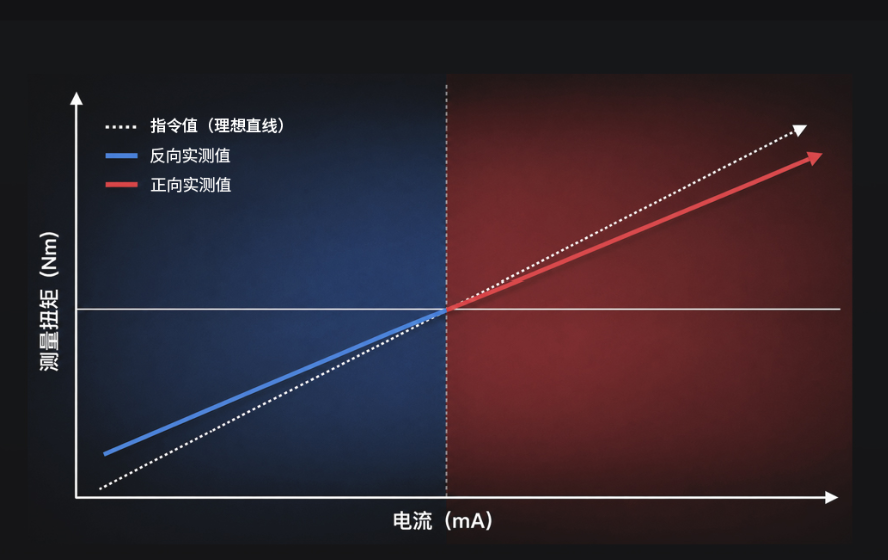
力控层面,XHAND 1 Pro支持4kHz带宽电流环力控,电流、力矩线性表现出众;重复开合速度超过5次/秒,为高频控制策略和强化学习提供硬件支撑。耐用性方面,关节经带负载工况测试超20万次,反驱耐用可靠。
系统集成方面,XHAND 1 Pro支持24V–72V宽压输入,兼容EtherCAT、RS485、CAN FD等主流通讯协议,全面支持Ubuntu系统,内置SDK支持C 、Python、ROS 2,并支持跨平台x86和ARM架构。控制模式覆盖MIT模式、前馈力控、位控与拖动示教。遥操作方面,支持Manus Pro Haptic、Manus Pro、IO-Tech Exoskeleton等多种方案,并提供自研高精度遥操作软件,支持人手与XHAND系列灵巧手之间的retargeting功能,使用户能够快速完成远程操作测试与高质量数据采集。产品交付周期小于一个月,上市即可交付。
这些参数组合在一起,指向一个一致的设计取向:XHAND 1 Pro为AI模型的训练与迭代而生。
02.
自己做大脑的公司,最懂怎么做手?
理解星动纪元为何要做灵巧手,需要先理解一个行业现状,那就是当前大多数具身智能公司,要么专注于大脑算法与模型,要么专注于本体机械结构和运控,极少有公司同时深度掌握大脑与末端执行器的自研能力。
这种分工格局造成了一个结构性矛盾。大脑团队对硬件的需求无法被充分理解和响应,硬件团队对模型训练的数据需求缺乏深刻认知。结果是做手的团队不懂模型企业需求,灵巧手的设计依然遵循传统机械思维,先定义机械架构,再让算法团队想办法适配;而非从模型的训练逻辑出发,反向定义硬件。
反观星动纪元的立场与此截然不同。作为国内为数不多的具身全栈自研企业,据机器人大讲堂获悉,创始人陈建宇在看到ChatGPT发布展示出的AI通用前景后,便笃定物理AI的兑现价值,而手作为末端执行器的核心卡点,2023年起,他们就开始瞄准全直驱路线进行深耕。3年时间,其技术体系覆盖从感知数据采集、具身大模型、运动控制算法,到本体与末端执行器的完整链路。这种全栈视角带来了一个外部供应商永远无法复制的能力,使其可以用具身大脑的视角定义手的设计。
机器人大讲堂了解到,星动纪元公司将这套逻辑称为「AI定义硬件」。具体体现在XHAND 1 Pro的架构选择上,也就是星动纪元最具代表性的全直驱方案。

行业中大多数灵巧手采用腱绳传动或减速器传动,这类方案在成本与结构紧凑性上有优势,但引入了传动间隙和摩擦误差,导致力觉数据存在噪声和迟滞。对于纯工业操作任务,这种误差尚在容忍范围之内;但对于训练VLA和世界模型,数据保真度至关重要,模型学到的是含噪声的物理规律,最终执行效果便会打折。
全直驱方案消除了中间传动环节,力控响应更快,背隙更小,采集到的触觉与力觉数据更接近真实物理交互的原始状态。这正是具身大脑训练所需要的数据特性,一种高颗粒度、低噪声、高保真的感知-动作配对数据。
简单来说,不是星动纪元偏爱全直驱,而是做大脑的人知道,只有全直驱才能给大脑喂到最干净的数据。
03.
触觉将是新的模型跃迁基座
在这个逻辑下,就能够理解当下XHAND 1 Pro搭载18个触觉传感器的选择。
具身智能当前的主流感知范式仍以视觉为核心。摄像头采集图像,视觉语言模型完成场景理解和任务规划。这套范式在“看”这个层面已相当成熟,但在“做”这个层面存在一个系统性缺口,那就是视觉在远距离规划有效,在接触瞬间失效。
手指接近物体的最后几厘米,是视觉感知最薄弱的区域。抓取角度、接触力分布、表面纹理、材质弹性,这些决定抓取成败的物理变量,摄像头无法直接测量。模型只能依赖经验估计,而非实时反馈。这是当前“看”的能力与“做”的能力之间最大的gap。

触觉传感器的价值,正在于填补这道gap。它提供连续的接触力反馈,让模型能够实时判断抓取是否过松或过紧,在毫米级精度上完成插拔、拧转、捏取等精细操作。更重要的是,触觉使模型能够对未知物体,例如新材质、新形状等都能做到快速适应,而无需依赖大量预置的经验,因为触觉特征本身就是实时的物理真相。
从数据角度看,触觉-动作配对数据具有极高的训练价值,且无可替代:这类数据只能在真实物理环境中产生,仿真几乎无法精确复现接触动力学的细节。这意味着,掌握高质量触觉数据采集能力的公司,实际上控制着具身大脑进化的一个关键燃料入口。而且这个入口,短期内无法被数据工厂或开源数据集替代。
星动纪元用「最后一厘米」来描述这个问题。这个比喻很精准,因为具身机器人能否真正商业化落地,最终由这最后一厘米的物理交互能力决定。视觉解决了任务的规划问题,触觉解决了任务的执行问题。一个没有触觉的机器人,永远无法在真正复杂的物理环境中稳定作业。
04.
「以手强脑」的价值闭环
星动纪元对机器人大讲堂介绍,其灵巧手的布局逻辑概括为「以手强脑」。
因为传统硬件思维是线性的,做出一只好手,卖给需要的客户。但在具身全栈框架下,灵巧手的意义不止于此。高精度五指灵巧手在真实场景中操作,产生触觉-动作配对数据;这些数据反哺VLA和世界模型的训练,提升模型的物理交互能力;进化后的模型驱动更复杂的场景落地,进一步产生更丰富的回流数据。
这是一个正向飞轮,而不同于一次性的硬件销售。这意味着灵巧手既是产品,也是数据采集基础设施;既是收入来源,也是大脑进化的加速器。

这套逻辑的成立,前提是企业必须同时掌握两个能力。一是足够高精度的灵巧手,这是数据质量的保障,二是具备真正能从数据中迭代的大脑,使其拥有飞轮的闭环能力。两者缺一,飞轮便无法转动。
星动纪元的全栈自研体系,正是为了同时满足这两个前提,使得星动纪元能够跑通做手的全流程。依托AINATIVE全栈自研技术底座,星动纪元打通了一条灵巧手采集高质量数据一>数据反哺大脑迭代>进化大脑驱动场景落地的完整价值闭环。
在数据采集层面。以高灵活度、高感知密度的全直驱五指灵巧手为物理载体,XHAND 1 Pro在真实环境中完成精细化交互操作,同步采集触觉、力觉与运动学数据。全直驱架构消除传动间隙,确保数据从物理现实到数字记录之间零失真,这是高质量数据的源头保障。21个自由度、18个触觉传感器,意味着每一次抓取、插拔、拧转,都能产生覆盖接触面全域的细粒度感知-动作配对,为具身智能大模型持续输送优质训练素材。

高质量数据能够持续喂养VLA和世界模型,推动模型能力快速迭代。而数据反哺大脑的效率,往往取决于大脑本身是否足够先进、是否能充分消化高密度的物理交互信息。外购灵巧手的公司即便采集了数据,也需要依赖第三方模型来消化;而星动纪元自研大脑,能够根据灵巧手的感知特性定制训练策略,真正实现以手强脑。
最终,进化后的大脑反过来驱动更复杂的场景落地,赋予机器人在真实工业与服务环境中的稳定作业能力;场景落地产生的新数据,进一步回流至训练闭环,推动下一轮模型迭代。飞轮的每一圈转动,都在同步积累数据资产、模型能力与场景经验,三者相互强化,构成竞争壁垒的核心。

这是一个正向飞轮,而不是一次性的硬件销售。灵巧手既是产品,也是数据采集基础设施;既是收入来源,也是大脑进化的加速器。这套逻辑的成立,前提是两个能力必须同时掌握:一是足够高精度的灵巧手(数据质量的保障),二是真正能从数据中迭代的大脑(飞轮的闭环能力)。
两者缺一,飞轮便无法转动。星动纪元的全栈自研体系,正是为了同时满足这两个前提,这也是为什么,这条路注定不能靠外采和集成他人组件来走完。
在商业层面,这套逻辑也带来了一个重要优势,因为自研意味着全生命周期成本可控。星动纪元同步推出了定位「干活手」的XHAND1,面向物流、工业等真实产业场景,依托自研带来的成本优势支撑规模化落地。「大脑手」负责前沿研发与数据采集,「干活手」负责场景验证与商业变现,双线并行,互为支撑。
目前,星动纪元已在物流场景与顺丰完成PMF验证。这意味着飞轮已经开始转动。
05.
新的竞争格局?
从更宏观的视角看,XHAND 1 Pro的发布,折射出当前具身智能竞争格局的一个深层变化,那就是硬件本身正在成为数据战略的延伸。
过去两年,具身智能的竞争焦点集中在模型能力,各大本体厂商比拼谁的VLA泛化性更强,谁的世界模型对物理规律的建模更准确。但随着行业逐渐意识到数据质量的决定性作用,竞争开始向上游延伸,因为想要训练更好的模型,就需要看谁能获取到更高质量的真实物理交互数据。
这个问题,把灵巧手推到了战略核心位置。但大多数公司面临一个两难选择,采购外部灵巧手,数据采集能力受制于硬件设计,且无法根据自身模型需求定制;自研灵巧手,需要同时具备机械设计、传感器集成、力控算法等跨领域能力,门槛极高。

星动纪元绕过了这两个大门槛,但代价是更长的研发周期和更重的技术积累。2024年其发布的首款 XHAND 1,已经吃到了这个方向的市场红利,得益于押注首款全直驱,能够打通高质量数据采集-反哺大脑-落地作业优势-真实落地数据进一步反哺大脑的闭环,从而在物流分拣、供件领域形成了显著优势,拿下全球科技巨头的订单,并且反哺到星动纪元工业落地。
XHAND 1 Pro的发布,是这笔投入的第二次阶段性兑现。更值得关注的是产品之外的信号。全直驱架构、整手触觉覆盖、交付周期小于一个月,这四个维度组合在一起,不只是一款科研级产品的参数表,更是一家公司在具身智能数据基础设施层面的卡位宣言。
具身智能的终局竞争,从来不是单一维度的。谁能在大脑与手之间建立最紧密的协同进化关系,谁就在积累最难被复制的技术护城河。
06.
结语与未来
一个悬而未决的问题是,当灵巧手的感知能力达到足够高的密度与精度,世界模型与VLA之间的路径争论,是否会有一个更清晰的答案?
答案或许不在论文里,而在真实场景中不断积累的触觉-动作数据里。谁的手更聪明,谁的大脑就进化得更快。
这个行业,正在用最原始的方式寻找答案,一次抓取,一次插拔,一次触碰。

 VIP复盘网
VIP复盘网
