

伺服电机基本介绍
伺服电机的定义
伺服电机是机器人伺服系统的核心执行部件,堪比人体肌肉神经。它集成了电机本体、高精度编码器与驱动器,通过闭环反馈控制,实现对机器人的位置、速度、力矩的精准调控。

伺服电机的类型
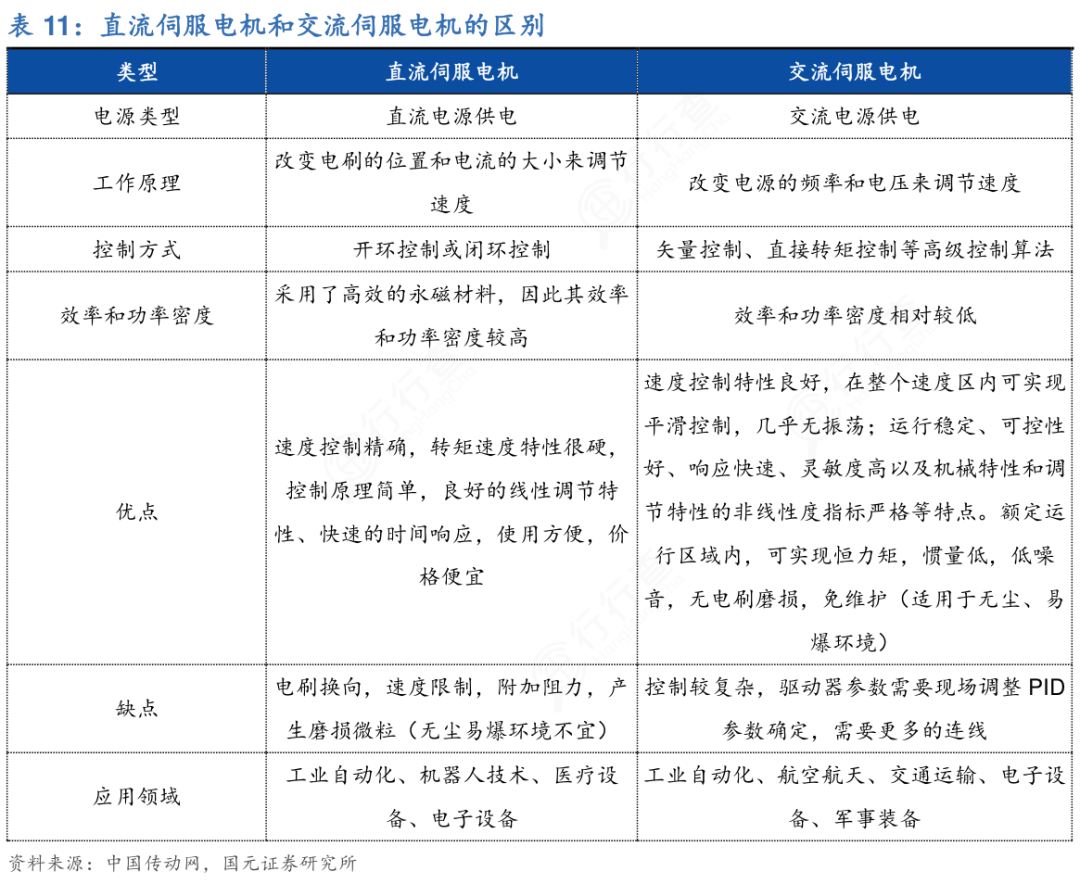
伺服电机按控制电源可分为直流伺服电机和交流伺服电机。
直流电机进一步分为有刷和无刷两类。有刷直流伺服电机控制精准,具备良好的转矩特性和线性调节特性,使用方便且成本低;无刷直流伺服电机以电子转向取代机械电刷,减少了摩擦和噪音,延长了使用寿命,但成本较高。
人形机器人机器人中,根据精度控制的需要,常用到以下四种电机:
1)步进电机:结构简单、成本低,但开环控制易失步,适合小空间低精度场景;
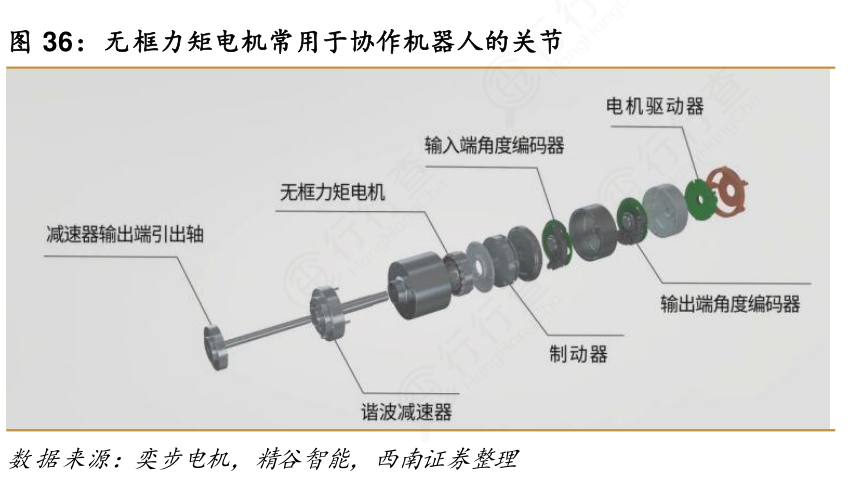
2)无框力矩电机:控制精度达0.1°,响应快,过载能力强,适用于大关节驱动。
3)永磁同步电机:精度同样达0.1°,扭矩密度高,响应时间20-50毫秒,闭环控制稳定,适合高动态性能的关节;
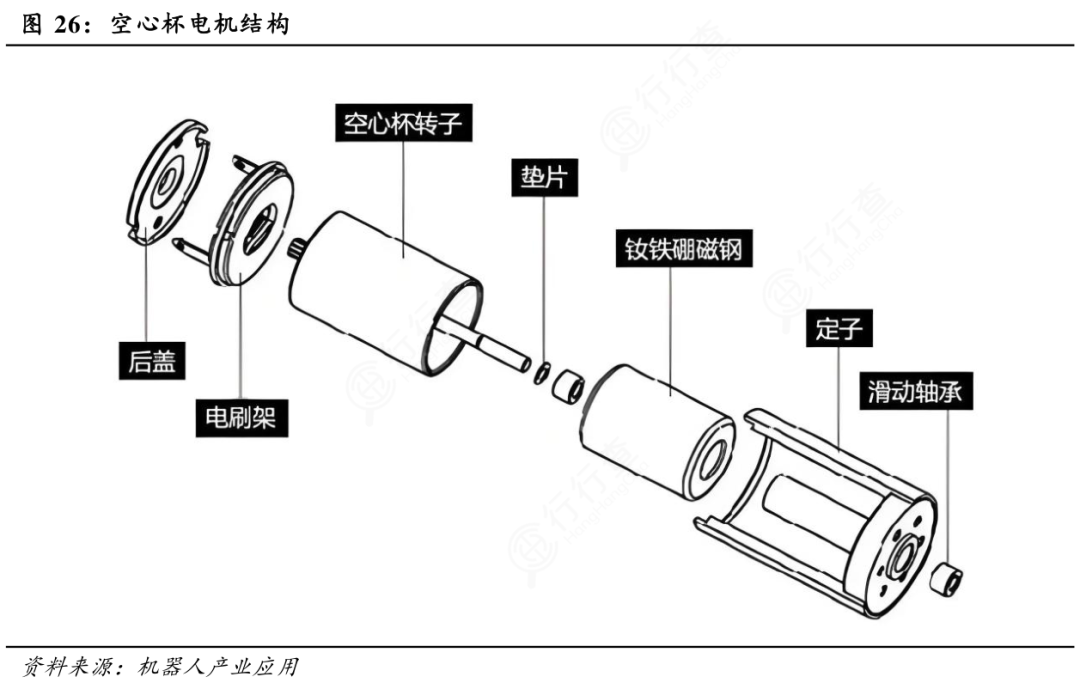
4)空心杯电机:精度高、功率密度高、温升低、响应时间小于28毫秒,常用于灵巧手等精细部位。

伺服电机的结构与原理
伺服电机的结构组成
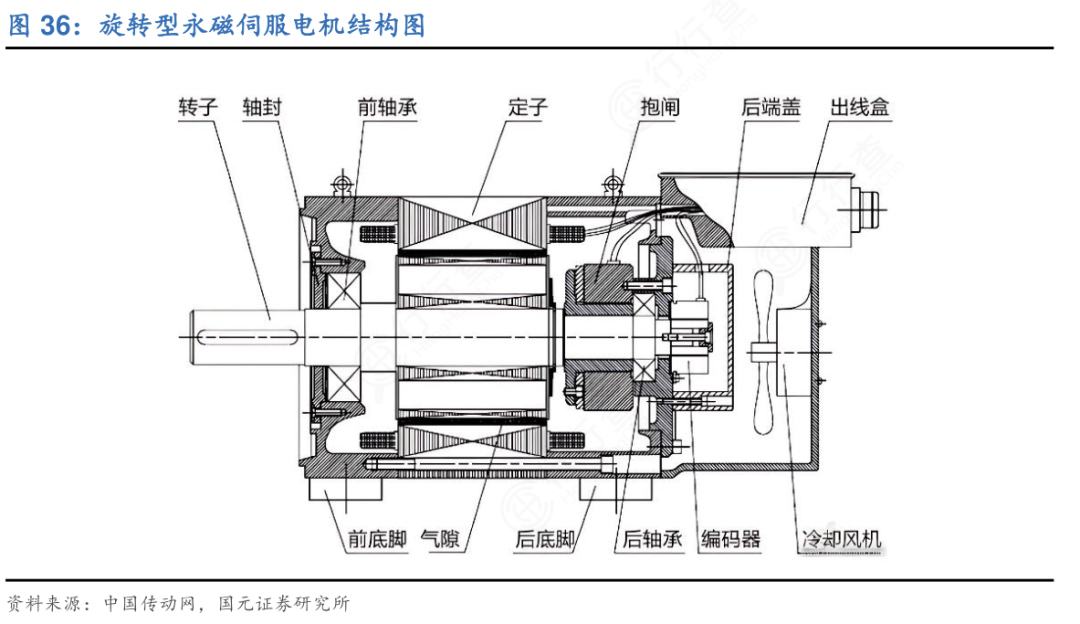
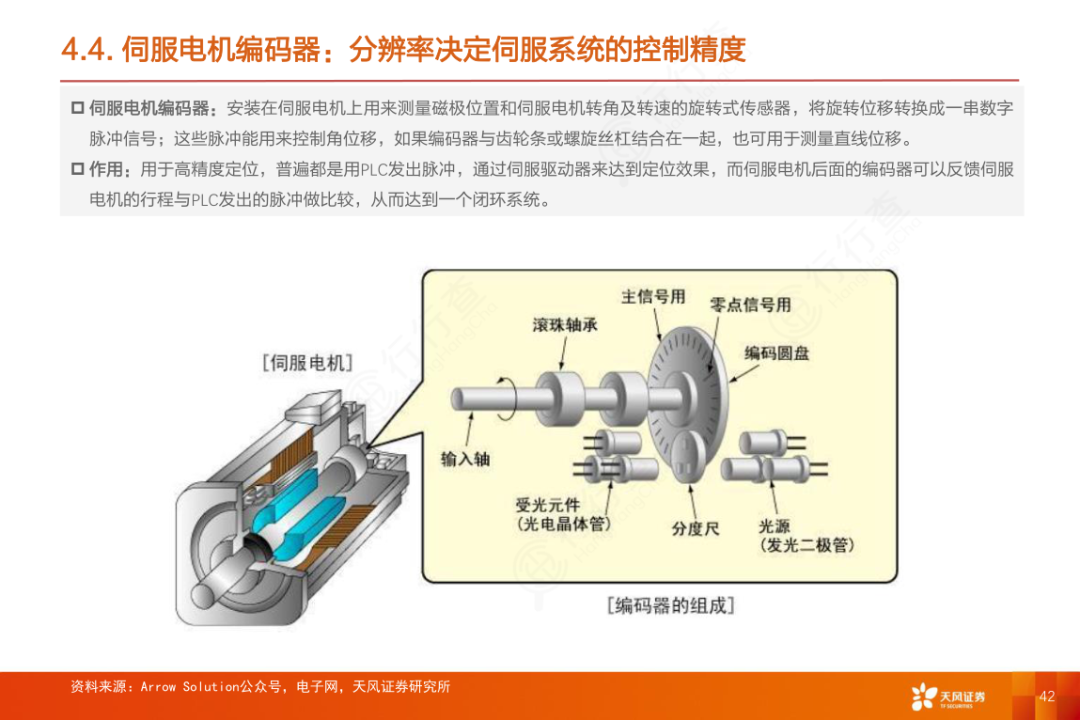
伺服电机的核心结构包括定子、转子、线圈、轴承、转轴及编码器等部件。定子通过通电线圈生成旋转磁场,高效产生转矩;转子外周配置高性能稀土类永磁磁钢,与定子磁场相互作用实现运转。
转轴作为动力输出部分,通过联轴器等传动机构驱动负载,滚珠轴承则支撑转轴,确保其稳定旋转。编码器用于实时监测转轴的转数和位置,并通过电缆将信号传输至控制系统,形成闭环控制,从而实现精准调速与定位。
伺服电机的工作原理
伺服电机的工作原理,基于闭环控制机制。运动控制器发送目标指令后,伺服控制器结合反馈处理器接收的编码器信号计算偏差,经PWM放大器将偏差转化为电流驱动定子绕组,生成旋转磁场,带动永磁体转子转动并输出转矩以驱动负载。
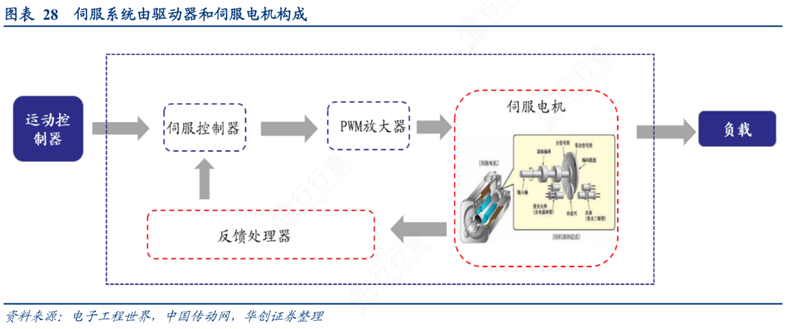
同时,编码器实时检测转轴的位置和速度信息,并反馈至反馈处理器,形成“指令→驱动→运转→反馈→修正指令”的闭环系统。通过持续调整电流,伺服电机能够精准控制转速和位置,确保按照预设轨迹稳定运行。

机器人对伺服电机的核心性能要求
1)精度:微米级控制的基础
精度是伺服电机核心指标,含定位与重复定位精度,直接影响作业质量。优质伺服电机依托高分辨率编码器,配合精密减速器后,末端执行器可达成±0.005mm精度,适配半导体晶圆搬运、精密装配等场景。
2)响应速度:动态作业的关键
响应速度体现电机对指令的跟随能力,以毫秒级衡量。高速抓取、动态避障等场景需电机快速启停转向,新一代产品经稀土永磁材料与自研芯片优化,响应速度低至1ms,配合总线技术实现多关节同步,规避滞后风险。
3)扭矩密度:小型化与大功率的平衡
扭矩密度是单位体积输出扭矩,制约机器人小型化。多关节机器人关节空间有限,需电机在紧凑尺寸内提供充足动力,通过高磁导率硅钢片转子结构优化 高密度绕组设计,可在体积不变时大幅提升扭矩,支撑医疗机器人等产品研发。
伺服电机应用领域
工业机器人关节:高精度与高刚性的极致融合
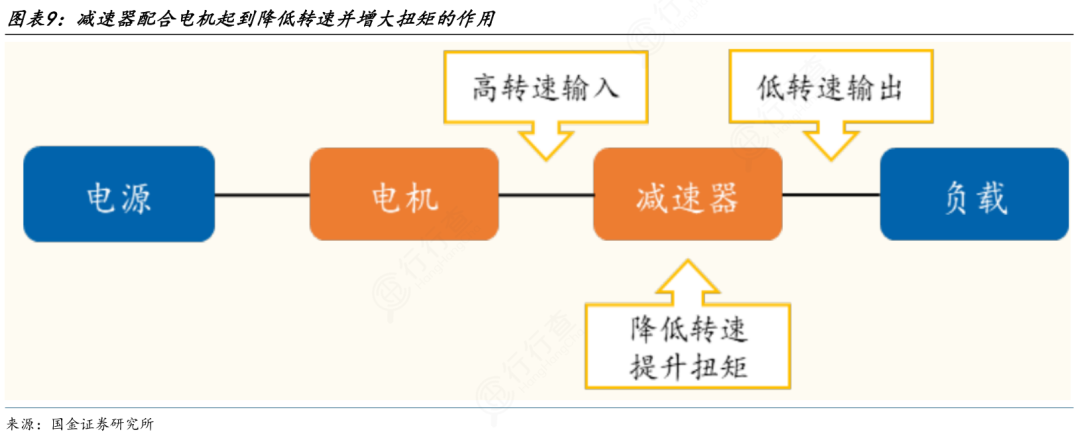
工业机器人关节是核心应用场景,一台六轴机械臂需6-8台伺服电机。汽车焊接、锂电卷绕等场景中,电机需兼顾高速运转与精准定位,配合谐波减速器放大扭矩,保障负载变化时轨迹稳定。
协作机器人:安全适配与人机协同
协作机器人需与人共享空间,伺服电机需具备力矩反馈、快速停机(STO)功能。产品多为一体化设计,集成编码器与安全模块,力矩响应时间<5ms,可感知碰撞并断力,低噪低振及IP54 防护适配近距离协作场景。
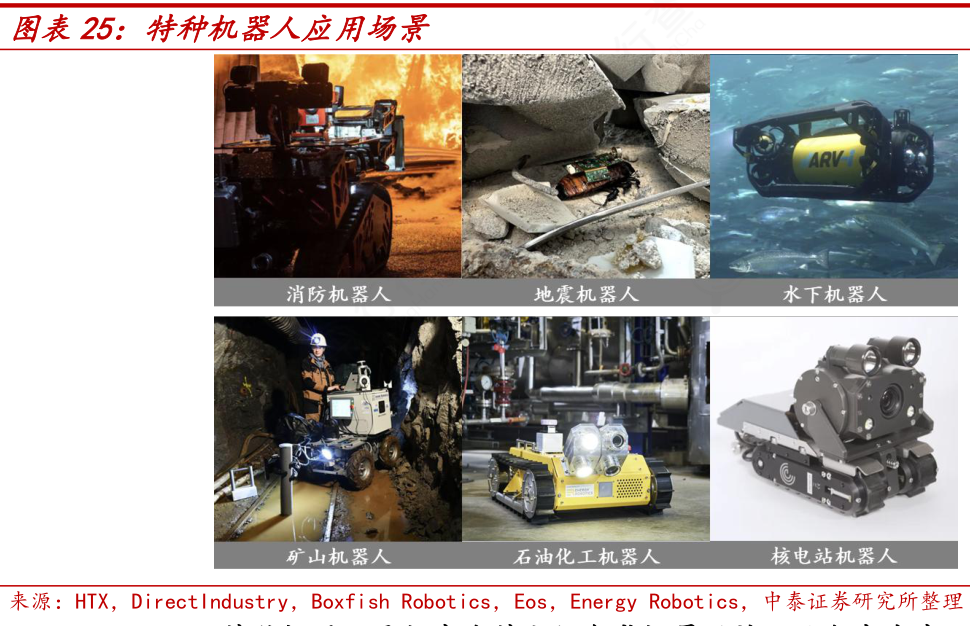
特种机器人:定制化技术突破极端场景
医疗型特种机器人可过滤手术颤抖实现亚毫米精度,满足电磁兼容要求;水下型凭借专用深水密封结构与主动压力补偿系统,能在数千米深海作业;防爆型采用本质安全电路,体积进行轻量化设计,适配危化场景的机器人作业。
人形机器人:灵活且稳定的运动能力
在人形机器人领域,伺服电机是关节运动的核心动力源。肩、肘、腕、髋、膝等关节的旋转与摆动均由伺服电机驱动,多电机协同可完成抓取、行走等复杂动作。

在位置控制中,伺服电机支持机器人实现精准定位;在速度控制中保障行走流畅性;在力矩控制中根据负载调整抓取力。
闭环控制结合编码器实时反馈,还能在崎岖路面上动态调整扭矩以维持平衡,赋予机器人灵活且稳定的运动能力。
产业链和市场规模
伺服电机产业链
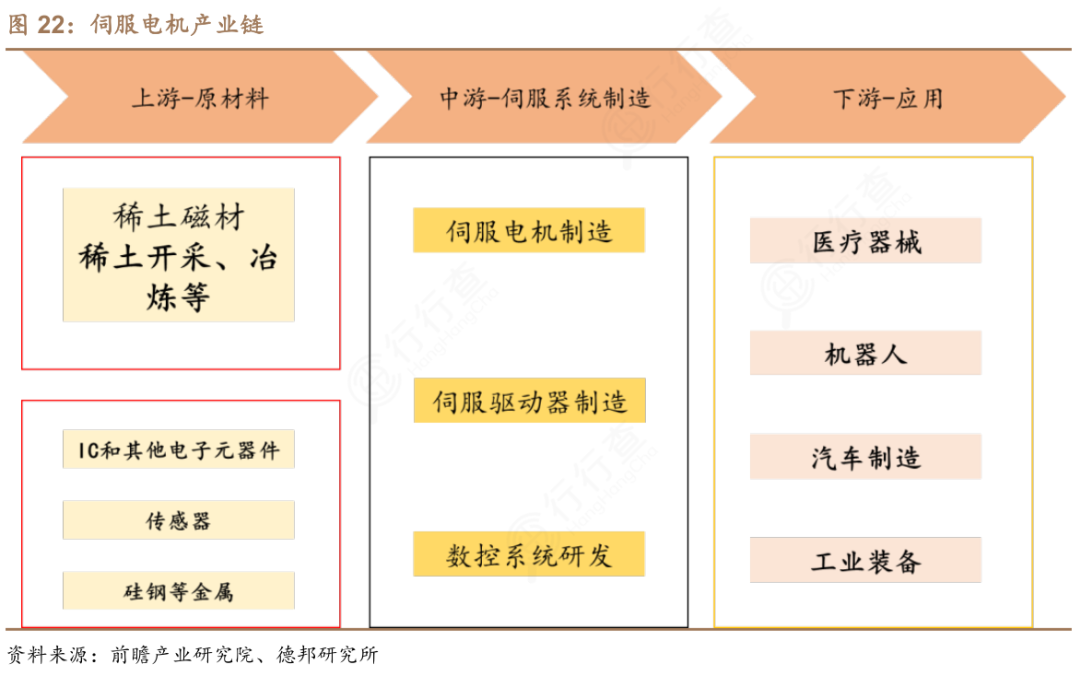
伺服电机行业的上游,主要包括稀土磁材和电子零部件,其中稀土磁材是伺服电机制造中不可或缺的重要原材料。中游环节除伺服电机制造外,还涵盖伺服驱动器制造以及数控系统研发等内容。下游应用领域广泛,包括医疗器械、机器人制造、汽车制造和工业装备制造等,展现出广阔的发展前景。
在人形机器人产业链中,伺服电机位于上游核心零部件环节,是动力执行的关键组件。无框力矩电机等高性能伺服电机在人形机器人零部件成本中占比较高,在运行过程中需与谐波减速器、编码器等协同工作,以驱动肩、肘、髋等关节的运动。

伺服电机市场规模
中研网数据,全球伺服市场规模展现出显著的增长趋势。2024年大约为150亿美元,预计到2030年,将增长至约220亿美元。
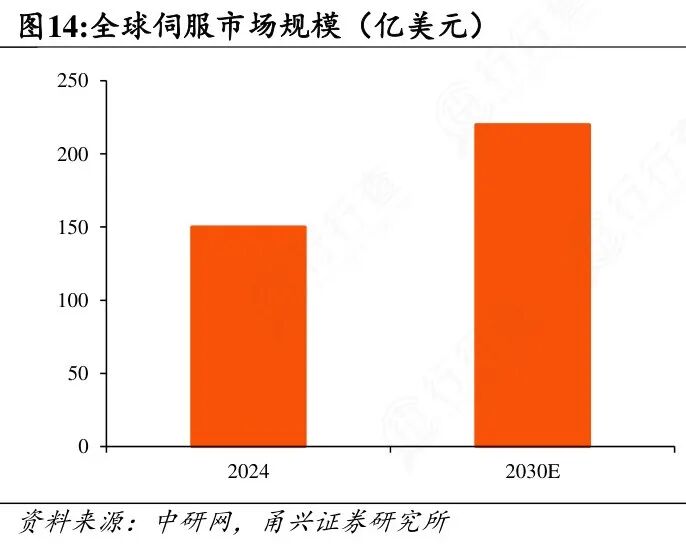
(数据时间:2025-07)
中国伺服电机市场,也在保持较高速扩张。中商产业研究院预测,2024年我国电机市场规模预计为223亿元。
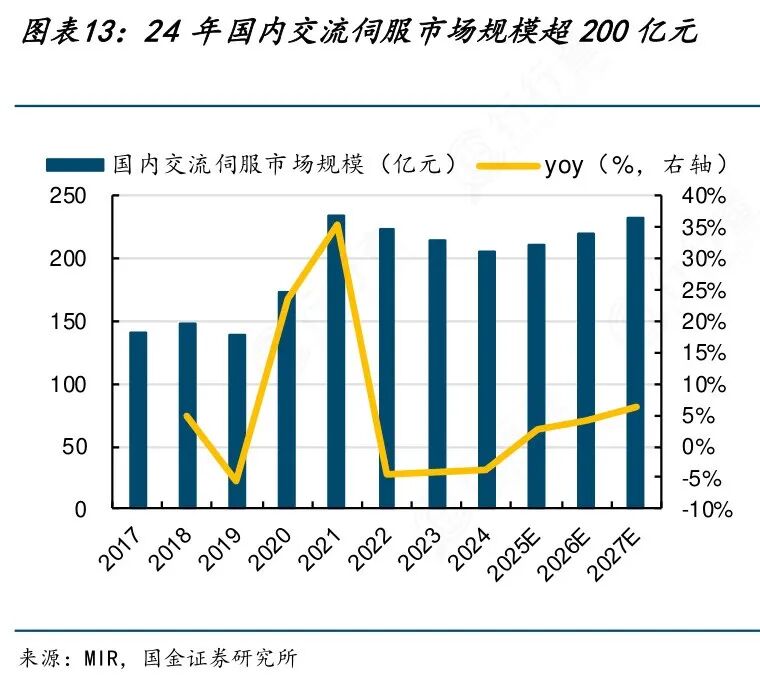
(数据时间:2025-08)
伺服电机观点分析
国产伺服电机的差距:高端领域仍存短板
国产伺服电机在中低端市场国产化率超60%,但高端领域距离日系、德系仍有不小差距。具体表现为:核心零部件依赖进口,算法积累不足,材料工艺与品控体系不成熟,极端环境下可靠性、寿命一致性待提升。

突破方向:场景深耕与技术攻坚
我们的国产伺服电机,正从“能用”向“好用”的方向跨越,逐步打破高端垄断。国产伺服电机仍需坚持“差异化创新“以及“全产业链攻坚”的道路。攻坚驱控一体化与力矩控制算法,强化特种场景定制能力,加速编码器等零部件的自主可控,搭建数字化品控体系,开放接口与下游协同构建生态。
机器人伺服电机主要企业
全球代表性企业
安川电机(日本):伺服技术积淀深厚,闭环控制精准,支撑工业机器人高速精密作业。
发那科(日本):与机器人本体协同优化,定位精度高,适配高端制造场景。
三菱电机(日本):变频控制技术领先,总线适配性强,助力多关节机器人。
西门子(德国):全球工业自动化的标杆企业,系统集成度高,提升机器人整体控制效能。
博世力士乐(德国):传动控制一体化企业,模块化设计出色,适配重载机器人稳定运行。
科尔摩根(美国):全球无框力矩电机龙头,精密控制卓越,赋能机器人关节轻量化。
ABB(瑞士):运动控制经验丰富,适配性强,支撑工业机器人多元需求。
国内代表性企业
国产伺服绝对龙头
汇川技术(深圳):伺服龙头,SV680系列接近国际先进,驱控一体化量产,获小米/优必选人形机器人订单。
埃斯顿(南京):六轴机器人全球第6,核心部件自给率70% ,伺服系统适配自家机器人,中端市场进口替代先锋。
鸣志电器(上海):空心杯电机全球领先,伺服系统覆盖工业与人形机器人,灵巧手核心部件供应商,步进与伺服双轮驱动。
卧龙电驱(绍兴):无框力矩电机量产领先,扭矩密度45Nm/kg,轴向磁通电机功率密度7.5kW/kg,适配人形机器人关节。
雷赛智能(深圳):运动控制龙头,伺服系统与步进电机技术成熟,在3C电子与工业机器人领域应用广泛,性价比优势明显。
细分领域龙头与核心技术提供商
禾川科技(嘉兴):国产伺服新锐,XS系列一体化设计,光伏与3C自动化领域进口替代加速,与华为昇腾深度合作。
步科股份(深圳):协作机器人无框力矩电机领先者,移动机器人伺服系统龙头,人形机器人关节模组技术实力突出。
台达电子(台湾):伺服电机与驱动器技术成熟,在3C电子与光伏设备领域应用广泛,性价比优势明显。
科力尔(湘潭):伺服电机与控制器企业,高响应速度适配工业机器人,人形机器人伺服技术加速突破,国产替代潜力大。
伟创电气(苏州):运动控制深耕者,伺服驱动器技术成熟,覆盖协作机器人、AGV等高响应场景,多产品布局卡位。
鼎智科技(常州):微型伺服电机专家,专注高精度、小型化伺服系统,在医疗机器人与精密仪器领域应用广泛。
德昌股份(苏州):无框力矩电机适配UR、节卡协作机器人,订单同比增长80%,协作机器人电机国产替代核心标的。
特色应用企业与新兴力量
信捷电气(无锡):工业自动化知名品牌,伺服电机与控制系统无缝集成,在电子制造与包装机械领域解决方案完整。
上银科技(台湾):伺服电机、线性传动组件长期为精密机械和工业自动化领域所依赖,积极布局人形机器人供应链。
步科股份(深圳):低压伺服系统国内市占率第一,第三代无框力矩电机减重30%,适配移动机器人关节。
科力尔(湘潭):伺服电机与控制器企业,高响应速度适配工业机器人,人形机器人伺服技术加速突破,国产替代潜力大。
巨能股份(西安):专注重型工业机器人伺服系统,在冶金与重型机械领域技术领先,适配极端工况。
江苏北人(苏州):工业机器人系统集成商,伺服系统适配焊接与装配机器人,在汽车制造领域应用广泛,国产替代加速

 VIP复盘网
VIP复盘网
