

一、行业定位:电子皮肤是打通物理 AI 的关键载体
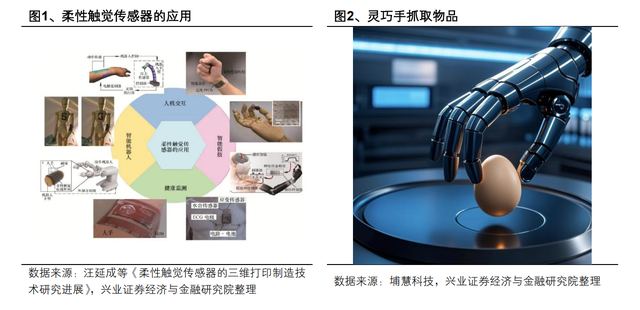
电子皮肤是模拟人体皮肤功能的柔性传感材料,依托柔性触觉传感器实现压力、温度、湿度等多类物理量感知,是人形机器人实现触觉感知、完成精细化作业的核心部件,更是物理 AI 落地应用的 “最后一厘米”。传统刚性传感器存在笨重、硬脆等缺陷,而电子皮肤具备高柔韧性、高灵敏度,可贴合机器人手指、手掌、肢体等各类部位,支撑机器人完成抓取、拿捏、识别物体等复杂动作。
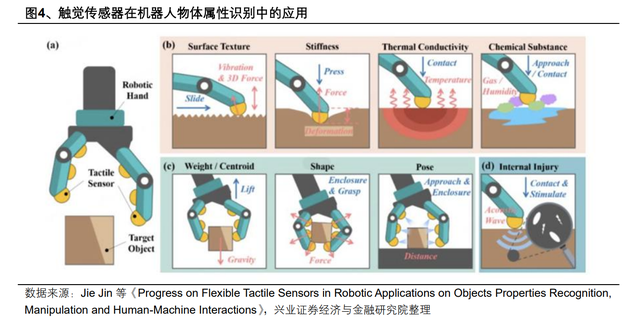
在实际应用中,触觉感知系统分为传感、感知、动作三大环节:传感层将压力、振动、温度等外界刺激转化为电信号;感知层结合视觉、听觉等多类信息完成物体材质、形状识别;执行层依据融合数据输出动作指令。目前电子皮肤不仅服务于人形机器人,在人工假肢、康复医疗、人体健康监测等领域也具备广阔潜力,但受限于敏感材料制备、结构设计与制造工艺,打造媲美人类皮肤的高性能电子皮肤仍是行业共性难题。
二、技术路线与核心壁垒:压阻式主导产业化,三重壁垒构筑护城河
(一)主流技术路线对比,压阻式产业化优势突出
当前电子皮肤主流技术包含压阻式、电容式、压电式、光学式、摩擦电式、电磁式六大路径,各类技术原理与适用场景差异显著。
压阻式凭借综合优势成为目前产业化首选,其利用材料受压后电阻率变化实现信号采集,具备结构简单、量程广、过载承受能力强、耐用性佳等特点,适配工业与消费电子场景,也是现阶段最成熟、可靠性最高的技术方案,缺点是迟滞性较强、温漂偏大、线性度一般。
电容式传感器依靠电极间距与重合面积变化检测受力,可精准测量三维力,灵敏度与空间分辨率高、动态响应优秀,但测量电路复杂,易受电磁干扰。压电式属于自发电技术,无需外接电源,响应灵敏、线性度好,不过易受噪声与温度影响。光学式抗电磁干扰能力强、分辨率极高,却存在温度干扰、光信号损耗、算法复杂度高等问题。摩擦电式与电磁式分别具备自供电、高灵敏度的特性,但前者易受环境干扰、信号漂移明显,后者集成度低、抗干扰能力弱。
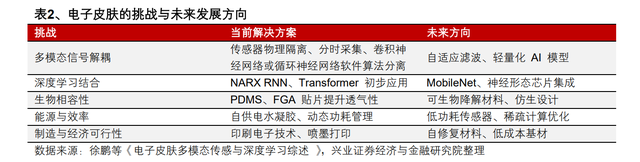
行业整体发展趋势为从单模态感知向多模态感知演进,但多模态信号解耦是当前核心挑战。硬件层面采用传感器物理隔离、时分复用会牺牲集成度与实时性;软件层面依靠卷积神经网络、循环神经网络分离信号,又需要海量标注数据与算力支撑,未来行业将依托自适应滤波、轻量化 AI 模型实现技术突破。
(二)三大核心壁垒,决定企业核心竞争力
电子皮肤行业壁垒集中在材料、制造工艺、算法三大维度,也是企业构建竞争优势的关键。
第一是材料壁垒。可拉伸性是电子皮肤基础属性,材料主要分为柔性基体与导电填料两大类。柔性基体包含弹性薄膜、水凝胶、3D 海绵等,决定产品柔韧性;导电填料以碳基材料、金属纳米颗粒、液态金属、导电聚合物、离子液体为主,负责实现导电与传感功能。传统硅、金属等脆性材料无法适配柔性需求,新型复合材料的配方、合成技术成为企业核心机密。同时,通过多层复合、图案化等结构设计,能够保障材料在拉伸、压缩状态下传感性能稳定,进一步抬高技术门槛。
第二是制造工艺壁垒。行业主流加工工艺涵盖光刻、3D 打印、喷墨打印、丝网印刷。光刻适用于高精度微纳结构,但工艺复杂、成本偏高;3D 打印擅长制作复杂立体结构,原型开发效率高;喷墨打印支持大面积批量生产,无掩膜设计使用便捷,但多层对准难度大;丝网印刷凭借低成本、高效率、适配柔性基材、可沉积厚材料层等优势,成为规模化量产的主流选择,该工艺可实现传感器阵列三维集成,适配低成本传感器大规模制造需求。
第三是算法壁垒。电子皮肤多模态数据处理高度依赖深度学习模型。卷积神经网络擅长提取空间特征,适用于触觉图像分类、物体识别;循环神经网络针对时序数据优化,适配动态压力、温度监测场景;Transformers 依托自注意力机制,可整合多模态时序数据,但对数据量与算力要求极高;脉冲神经网络具备低功耗优势,契合事件驱动场景,目前仍处于研发早期。未来行业将朝着模型轻量化、神经形态芯片集成、可生物降解材料、低功耗自供电等方向发展,同步解决生物相容性、制造成本等产业化问题。
三、数据产业链:触觉手套重塑采集模式,成为产业化重要推手
高质量数据是人形机器人落地现实场景的核心基础,机器人数据分为真机数据、仿真合成数据、动捕数据、互联网视频数据四大类,其中真机数据准确度最高、落地性最强,是产业核心刚需,但传统真机遥操采集模式成本高、效率低,难以快速扩张。谷歌研发机器人模型时,曾耗费十几个月、调动十余台设备才积累十几万条操作轨迹,足以体现传统模式的局限性。
触觉感知数据能够大幅提升人形机器人训练效果。相较于传统视觉 - 语言 - 动作(VLA)模型,融入触觉的视觉 - 触觉 - 语言 - 动作(VTLA)模型表现显著优化:实验数据显示,搭载 VTLA 模型后,机器人夹爪抓取成功率提升 21.9% 至 96.9%,灵巧手抓取成功率提升 6.2% 至 100%,同时机器人运动轨迹更加平滑,动作逻辑更贴合实际应用需求。
当前数据采集行业正从分散的 “手工作坊” 转向标准化 “数据工厂”,触觉手套成为主流采集方案,相比传统真机遥控模式,数据获取成本可降低 90%,同时具备多模态、高自由度、便携性强的特点,可同步采集触觉、视觉、动作等全维度数据。业内多家企业已完成产品落地与布局:灵初智能推出全球首个具身原生人类数据采集方案 Psi-SynEngine,依托触觉手套实现全场景无感数据采集;帕西尼投建全模态超级数据采集工厂,采用触觉手套构建全模态数据体系,采集效率为传统遥操作的 3-6 倍;此外,途见科技、南山智尚、他山科技等企业也相继推出触觉手套产品或布局多模态数采中心,推动触觉手套与电子皮肤需求同步增长。
四、市场空间测算:2030 年全球电子皮肤市场规模预计达 190 亿元
(一)人形机器人整机出货量高速增长
2025 年全球人形机器人出货量为 1.7 万台,市场规模 29 亿元。其中中国产业优势显著,整机企业超 140 家,出货量 1.44 万台,占全球 84.7%,市场规模 15.5 亿元,全球占比 53.8%;海外头部企业尚未实现规模化量产,特斯拉、Figure AI 等企业出货量均处于低位。
随着国内宇树科技、乐聚智能、云深处等头部企业启动 IPO 扩产,叠加特斯拉 Optimus V3 计划在 2026 年下半年正式投产,全球人形机器人将迎来爆发式增长。预计2030 年全球人形机器人出货量将达到 122.1 万台,其中中国出货量 62.2 万台,海外出货量 59.9 万台;对应整机市场规模 1463 亿元,2025-2030 年出货量年复合增长率达 135%,市场规模年复合增长率达 119%。价格方面,行业规模化效应将推动产品持续降本,2025 年中国人形机器人均价 10.76 万元 / 台,海外均价 51.18 万元 / 台,预计 2030 年国内均价降至 4.21 万元 / 台,海外均价降至 20.04 万元 / 台。
(二)电子皮肤细分市场规模拆分
电子皮肤市场由人形机器人本体配套市场与数采中心触觉手套市场两部分组成。从单台价值量来看,2025 年国内人形机器人全身电子皮肤价值量约 0.8 万元 / 台,海外约 5 万元 / 台;随着技术成熟与量产落地,2030 年国内单台电子皮肤价格降至 0.31 万元 / 台,海外降至 1.96 万元 / 台。
机器人本体电子皮肤市场:2025 年全球市场规模 2.45 亿元,预计 2030 年增长至 137 亿元,2025-2030 年复合增长率 124%。 数采中心触觉手套市场:2025 年全球数采中心仅 20 家,单中心年需求手套 20 双,市场规模 0.16 亿元;预计 2030 年全球数采中心增至 504 家,单中心年需求手套 562 双,手套单价从 2 万元 / 只降至 0.9 万元 / 只,对应市场规模 53 亿元,2025-2030 年复合增长率 219%。
综合两大板块,2025 年全球人形机器人电子皮肤总市场规模为 2.61 亿元,预计 2030 年达到 190 亿元,2025-2030 年行业年复合增长率高达 136%,成长空间巨大。
五、竞争格局:海外传统巨头技术领先,国内新锐企业加速突围
目前电子皮肤行业整体处于发展初期,全球玩家分为海外传统传感器大厂与国内新锐企业两大阵营,竞争格局清晰。
(一)海外企业:日美龙头深耕多年,技术积淀深厚
海外市场以美国、日本传统传感器企业为主,依托数十年技术积累占据高端市场。美国 Tekscan 成立于 1981 年,源自麻省理工学院,是全球触觉传感龙头,产品覆盖汽车、医疗、工业等多领域;Interlink Electronics 拥有 40 年行业经验,在压阻式传感器领域技术领先,主打力感电阻技术;PPS 专注电容式触觉传感,产品 RoboTact 专为机器人设计,空间分辨率与检测精度行业领先。此外,美国 SynTouch 深耕医疗假肢与机器人触觉领域,可感知力、振动、温度等多类信号。
日本企业同样具备强劲实力,XELA Robotics 脱胎于早稻田大学,拥有七十余年机器人与触觉传感研发经验;面板巨头 JDI 跨界布局柔性触觉传感器,依托 LTPS TFT 阵列技术,打造出高分辨率、低串扰的柔性传感产品,应用场景覆盖机器人、医疗、体育等领域。整体来看,海外企业在材料、精密制造、底层算法上优势明显。
(二)国内企业:新锐玩家集中涌现,量产能力快速提升
国内入局企业以新锐科创公司与传统上市公司为主,全产业链布局逐步完善,部分企业已实现批量出货。帕西尼感知科技为行业头部企业,产品线覆盖传感器、灵巧手、人形机器人整机,同时建成大型数据采集中心,投资方包含比亚迪、京东、商汤科技等知名企业,估值超百亿元。
上市公司方面,福莱新材研发实力突出,拥有国家级博士后工作站,电子皮肤产品矩阵完善,已斩获灵心巧手 10 万套大额订单,实现批量出货;汉威科技通过子公司苏州能斯达布局柔性传感器,技术路线齐全,电子皮肤产品已小批量供货;晶华新材控股子公司晶智感建成全自动产线,具备规模化量产能力,产能可满足 20 万只灵巧手配套需求;日盈电子柔性触觉传感器获得项目定点,海外工厂助力拓展北美市场。
此外,柯力传感参股他山科技、猿声科技布局触觉传感赛道;他山科技自研 AI 触感芯片,牵头工信部重点项目,技术实力突出;申昊科技、奥迪威、墨现科技、埔慧科技等企业也分别从机器人应用、传感器制造、材料研发等角度切入赛道,国内产业集群逐步成型。

 VIP复盘网
VIP复盘网
