

一只重量约700克的机器人手,可以握住剪刀,连续完成开合;也可以在不放下工具的情况下,通过手指之间的配合调整物体的位置和姿态;当手指接触物体时,它还能感知受力变化。
这只手名为MIDAS Hand,是由加州大学洛杉矶分校(UCLA)机器人与机构实验室 RoMeLa 于近日发布的全开源灵巧手项目。MIDAS Hand采用低阻抗直驱结构,并从设计初期就集成触觉传感器
更关键的是,它不是一台只能展示的封闭样机。
其BOM成本约为3000 美元。熟悉流程后,可以在3小时左右完成装配。机械结构、零部件清单、3D打印文件、装配文档、控制 API、MuJoCo仿真模型、遥操作和动作重定向工具链,均已开放。
项目网站:https://midas-hand.com/
Github: https://github.com/midas-hand-org
这意味着,MIDAS Hand不只提供了一只会动、能感知的灵巧手,也试图降低触觉灵巧手的复现和使用门槛。
01.
一只原生带触觉的直驱灵巧手
MIDAS Hand采用四指拟人化结构,共有16 个自由度,其中13个为主动自由度,3个为被动自由度。整手尺寸为 205×120×55毫米,重量约700 克,接近人手。
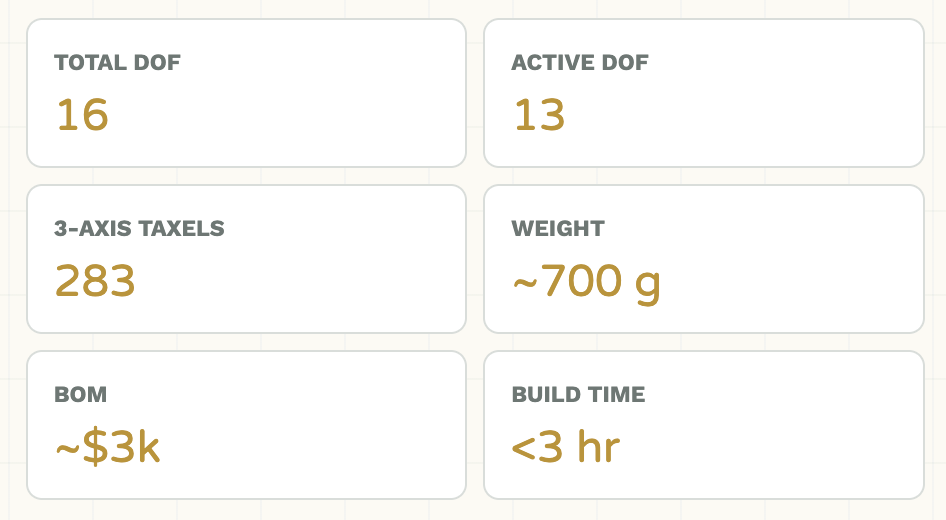
MIDAS Hand 核心参数
它最核心的差异,是把触觉感知直接放进硬件底层。
MIDAS Hand集成帕西尼触觉传感器,共包含283个三轴触觉单元,当前主要分布在指尖位置。这意味着,机器人不仅能够知道手指移动到了哪里,也能感知接触是否发生、受力方向如何变化。
这对灵巧操作很重要。拿起纸杯、旋转物体、捏住工具,都不能只依靠摄像头和关节位置判断。物体是否滑移、抓取力度是否合适、接触状态是否稳定,都需要触觉补充。
另一个关键点是驱动方式。
MIDAS Hand 采用非绳驱、低阻抗直驱结构。与部分绳驱灵巧手相比,它减少了绳索张紧、传动标定和后期维护等环节,也具备一定反驱特性。对于需要反复调试、接触丰富操作和力控制研究的实验室,这种结构更加直接,也更容易维护。
根据项目方资料,MIDAS Hand已完成超过10000 次手指开合测试。团队还展示了硬件一致性和稳定性的重复性测试。
对一套刚刚发布的开源硬件而言,这不意味着它已经解决了所有稳定性问题。但至少说明,它开始具备进入持续实验的基础。
02.
从抓取到遥操作,MIDAS Hand可以做到什么?
一套科研硬件有没有价值,最终要看它能否进入实验。
MIDAS Hand官网已经展示多类Demo,覆盖灵巧操作、触觉响应、视觉遥操作、动作重定向、重复性测试和MuJoCo仿真。
其中,最直观的一项是操作剪刀。
MIDAS Hand 可以握住剪刀,并通过多根手指之间的配合连续完成开合。相比单纯抓住一个物体,剪刀操作更考验手指之间的协同。灵巧手不仅需要稳定握住工具,还要持续控制动作幅度。
连续任务执行也完全hold住。
MIDAS Hand 被安装在机械臂末端,围绕真实桌面环境中的物体完成连续操作。这个过程中,灵巧手不再只执行一个孤立动作,而是需要与机械臂配合,在不同接触状态之间持续切换。
这也意味着,MIDAS Hand的用途不只局限于单项硬件测试。它已经开始进入机械臂协同操作、策略验证和连续任务实验。
在触觉演示中,当手指接触物体时,屏幕会同步显示触觉阵列的响应和受力变化。
在遥操作场景中,系统可以识别人手动作,再将关键点映射到 MIDAS Hand。对机器人学习研究而言,这意味着实验室可以围绕手部动作重定向、模仿学习和数据采集开展进一步实验。
项目还开放了 MuJoCo 仿真模型和硬件同步视图。研究团队可以先在仿真环境中测试控制策略,再逐步迁移到真实硬件。
从第三方视角看,MIDAS Hand 现阶段最值得关注的,并不是某一个抓取动作有多炫。它真正有价值的地方,是试图把“触觉—遥操作—仿真—真实控制”放进同一套可复现平台。
03.
开源文件之外,实现真正复现
开源文件只是起点。能够被其他实验室真正复现,才是一套科研平台的门槛。
对研究团队而言,难点往往不是下载CAD,而是如何采购合适的电机和传感器,完成打印、装配和标定,再将硬件接入现有机械臂与软件环境。
MIDAS Hand正在尝试把这条路径补齐。
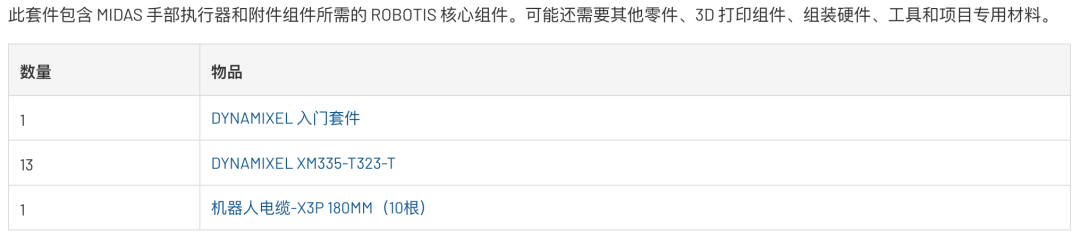
目前,MIDAS Hand已与帕西尼和Dynamixel合作推出配套套装。其中,ROBOTIS 官方商城已经上线MIDAS Hand Bundle,提供DYNAMIXEL电机和相关配件套装。帕西尼也推出了对应的触觉传感器套装。前者解决驱动系统和核心配件采购问题,后者解决触觉传感器选型、结构适配和感知接入问题。
官方页面显示,Dynamixel套装售价为2557.26 美元,包含13个XM335-T323-T电机、1套Starter Kit和线缆。
需要说明的是,这不是一只已经组装完成的成品手。3D打印件、部分装配硬件、工具和项目材料,仍需另行准备。

帕西尼触觉套件的意义,也不只是增加一个采购链接。
过去,实验室即使能够搭建一只开源灵巧手,也常常需要自行筛选触觉传感器,重新设计安装结构,再完成标定和接口适配。MIDAS Hand则从一开始就将触觉纳入整机设计。

在软件和硬件文档方面,项目方计划继续补充完整 BOM、CAD 文件、装配视频、传感器安装与标定说明、常见机械臂末端转接件,以及适配拓竹等常用3D打印机的推荐打印配置。
MIDAS Hand 不只是在开放一套文件。它也在尝试让一款带触觉的灵巧手,真正沿着说明书被搭建出来。
04.
下一代LEAP Hand?
在开源灵巧手领域,LEAP Hand 是一个重要参照系。它在2023 年发布,核心价值不是追求最复杂的结构,而是将灵巧手从昂贵、封闭的专用设备,变成实验室可以自行组装的机器人学习工具。
MIDAS Hand延续了这条低门槛路线,但进一步把触觉感知放进底层。
根据项目方提供的对比口径,相比第一代 LEAP Hand,MIDAS Hand在关节驱动扭矩不降低的情况下整体尺寸约缩40%,更接近人手。
紧凑的尺寸,意味着它更容易与机械臂、遥操作系统和机器人学习平台集成。原生集成的触觉传感器,则让它更适合多模态感知、触觉智能和接触丰富型操作等研究方向。
部署门槛也是 MIDAS Hand 想解决的问题。
很多实验室已经拥有现成的 6 自由度或 7 自由度机械臂,却仍然缺少成本可控、容易适配的灵巧手末端执行器。MIDAS Hand 采用非绳驱、低阻抗的关节驱动布局。它的结构,电机,电控等全部集成在手部空间内,无需占用小臂空间。通常情况下,只需要针对机械臂末端设计一个3D打印转接件,就可以完成安装适配。
成本也进一步压低。MIDAS Hand的BOM 成本约为 3000 美元。作为补充参照,ORCA Hand 同样是一款面向灵巧操作研究的开源灵巧手平台,并提供触觉版本,其成本约为 6000-9000美元。
对于经费有限,但希望开展灵巧操作、遥操作、触觉感知和数据采集研究的实验室而言,MIDAS Hand 提供了一个门槛更低的选择。
05.
从一只手,走向一套开放平台
当然,MIDAS Hand仍处于早期阶段。
当前版本采用四指结构,触觉传感器也主要集中在指尖。对于基础接触感知和抓取实验,这套方案已经能够工作。
但如果要进一步支持滑移检测、包络抓取和更复杂的接触状态识别,未来版本的触觉覆盖将向指腹和掌心延伸,五指版本也在团队的考虑范围内。
与此同时,项目方透露,将继续完善耐久性测试、电机动态特性标定、装配文档、标定流程和软件工具链。团队还计划推出适配 MIDAS Hand 的外骨骼式数据采集设备,用于收集更高质量的多模态灵巧操作数据。
围绕开源硬件设计、系统集成和基准测试,相关论文也计划投稿至 2027年ICRA等机器人会议。目前,项目已与UCLA 内部多间实验室、UC Berkeley BAIR Lab、NVIDIA GEAR Lab、京都工艺纤维大学等建立联系或展开初步沟通。
这些动作都指向同一件事。MIDAS Hand 想做的,不只是一只能够运行 Demo 的灵巧手,而是一套可以持续复现、修改和扩展的开放平台。
在灵巧操作研究中,这可能比单纯增加几个自由度更重要

 VIP复盘网
VIP复盘网
