

图片来源:奇瑞捷豹路虎神行者8发布会
早在2025年4月,伟世通就开始与高通联合开发基于8397的座舱域控制器,首个客户就是神行者8,未来奇瑞的高端车型也会采用基于8397的座舱域控制器。高通8397与8797在物理die上是同一块芯片,以不同软件SDK划分为不同的型号。
神行者8是奇瑞与捷豹路虎合资成立的独立新能源品牌FREELANDER的首款量产车,不是传统路虎车型,而是全新品牌下的产品。该品牌于2026年3月北京车展发布。设计语言延续经典FREELANDER元素,动力由奇瑞提供1.5L增程器,智驾则全系搭载华为896线激光雷达和乾崑ADS V4.1系统。

神行者8对标理想L8/L9,轴距达3040毫米。

座舱配置目前未完全公开,大致类似阿维塔的带鱼屏,估计有3-4块屏幕构成,中控屏大约是3K分辨率,17英寸。

图片来源:闲鱼,文字部分为笔者加注
和国内理想、零跑等厂家尽力节约成本不同,神行者8不仅主芯片用料奢侈,辅助芯片也颇为奢侈和先进,神行者8有三个第一:第一批使用高通8397的全球车型,第一个使用最先进的MCU即英飞凌的TC4X系列,第一个使用UFS4.0做存储。同时大部分芯片都是最先进的,包括蓝牙模块、视频HUB、以太网交换机,比国内新兴造车厂家还要先进,这点非常难得。
QAM8397的强大性能已无需再次介绍,估计神行者的QAM8397内部的LPDDR5X容量是24-36GB之间,电源管理芯片有9片,围绕着QAM8397。
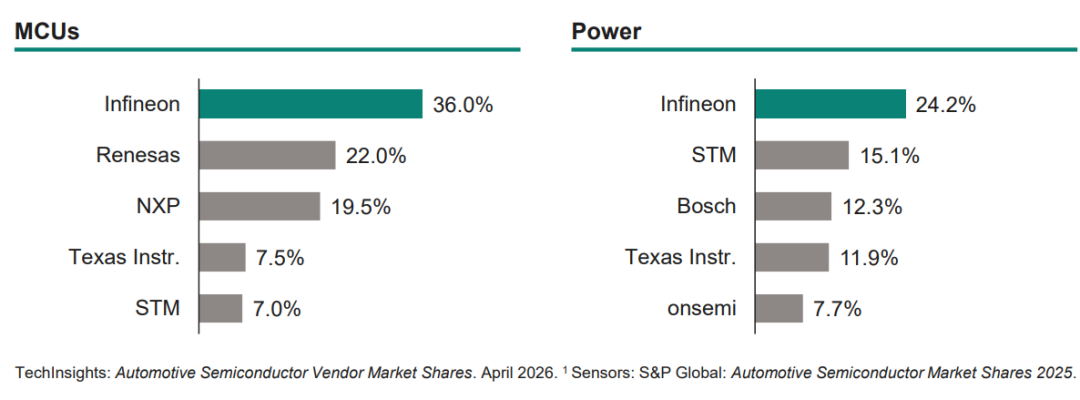
英飞凌是全球第一大汽车MCU厂家,市场占有率高达36%,汽车MCU市场的集中度很高,前5名市场占有率合计92%,同时英飞凌也是全球第一大汽车功率半导体厂家。
目前量产车型基本上都是使用英飞凌的TC3X系列,以TC397最为常见,几乎垄断底盘与动力域市场。2024年6月,英飞凌正式发布TC4X系列MCU。2014年英飞凌推出第一代TC2X系列MCU,至今还有不少厂家市场,如特斯拉的线控转向,2018年英飞凌推出第二代的TC3X系列,第三代TC4X使用了比较先进的RRAM,在与台积电协助下才攻克了量产难题。
相比TC397,神行者8使用的TC4D9XP,TriCore从 v1.6.2 升级到 v1.8,频率从 300MHz 提升至500MHz,最高支持 6 对锁步核同时运行,算力已逼近低端 SoC,例如 TC4Dx 系列算力可达 8000 DMIPS(双核 A53 算力 7360 DMIPS);新增两级 MPU,引入虚拟化功能;容量上最高支持 25MB NVM,比TC397的16MB高出不少,基于 TC3xx 的 A\B SWAP 机制进行迭代优化,真正实现了零停机升级;SRAM由6.9MB增加到10.8MB.
英飞凌MCU主要集中在动力、底盘和ADAS领域,TC4X则加大进攻座舱领域的力度,TC4X系列MCU加大了虚拟机资源,应对座舱领域需求,TC4X的每个核有三套独立硬件资源 HRHV 、HRA 、HRB,可支持最大 8 个 VM(虚拟机),其中 VM0 运行 hypervisor,VM1 运行实时虚拟机,VM2-7 运行其他 VM。EB 与英飞凌联合开发基于AURIX TC4x 的 AutoCore OS 和 EB tresos Embedded Hypervisor,支持 OEM 和 Tier 1 更轻松地开发和部署基于 AUTOSAR Classic 标准的汽车 E/E 架构。
TC4X系列MCU添加了并行处理单元 PPU ( Parallel Processing Unit) ,用于实现数据处理需求大或执行时间要求快的模型,例如信号滤波、算法处理、模型预测控制等。标量处理单元里包含了一颗 32bit 标量核,它支持双精度浮点运算,用于执行大量标量运算;向量 DSP 处理单元,位宽 128~256bit ,支持 SIMD (单指令多数据)指令,支持浮点向量运算、专用信号处理,提高计算效率。
除了智驾方面(主要是超声波雷达与毫米波雷达信号处理)应用,PPU 也可应用在电机矢量控制上,在算法上坐标变换使用三角函数、观测器迭代、锁相环鉴相等等操作是非常消耗 MCU 的计算资源,PPU 中的 Vector DSP 单元可以有效加速实时观测计算,从而帮助 Tricore 提高运行效率。
MathWorks 在官方提供了基于 TC4x 的 Tricore 与 PPU 通信的模型、基于 PPU 的电机矢量控制模型等;PPU 还可用于基于 AI 的电池诊断,包括镀锂层检测,电池健康状态(SoH)和老化轨迹预测,剩余使用寿命(RUL)预测等等。
图片来源:英飞凌
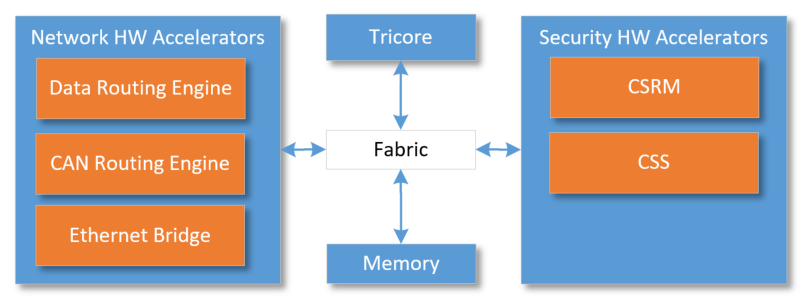
TC4X考虑到了先进域控制器和网关的需求,增加了DRE、CRE模块等用于CAN2ETH 、CAN2CAN 等数据路由硬件加速功能。TC4x 支持 5 个 CAN 模块,每个 CAN 支持 4 个节点,总计 20 个 CAN Channel。
在每个 CAN 模块内部有一个 CRE (CAN Routing Engine) , 用户只需要配置相应的路由表(寄存器),即可实现模块内部节点间的CAN路由,DRE:用于 CAN 和 Ethernet 的相互路由,和 CRE 完成 CAN 帧到不同 CAN 模块的路由。DRE 最重要功能就是把 CAN 帧路由给 Ethernet 帧。TC4X集成的千兆以太网(GETH)模块,支持两个10M、100M、1G、2.5G、5G速率全双工模式的以太网端口,支持TSN的802.1Qav、802.1AS、802.1Qbu、802.1Qbv。
神行者8的TC4D9XP应该具备网关作用。
神行者8的UFS不同寻常,采用了比较少见的铠侠的UFS,并且是目前最先进的UFS4.0标准,目前其他厂家使用的是美光的SH023或SH021,都是UFS3.1。UFS 4.0 闪存标准单通道带宽最高可达 23.2Gbps(约为 2.9GB/s),实测连续读取速度约在 4200MB/s 左右,连续写入速度约在 2800MB/s 至 4000MB/s 之间。其整体读写性是上一代 UFS 3.1 的两倍,且功耗效率提升约 45%。神行者8的UFS是THGJFJT0T25BAB8,容量128GB,最高速率4640MB/s。
PS8651V 是谱瑞科技(Parade Technologies)推出的一款车用级 DP 2.1a/HBR3 1:2 MST(多串流传输)集线器控制器。它专为需要扩充 DP/eDP 端口的汽车信息娱乐系统、周边配件及视频显示产品设计,通道链路速率最高可达 HBR3(8.1Gbps),最多支持 4 通道传输。
简单说,它把主芯片输出的一路eDP信号,“一变多”了。但这绝不是简单的复制粘贴,而是一次智能的再分配。主芯片只需处理好图像渲染和合成,输出一路高带宽的“数据流”,剩下的路由和配送工作就交给PS8651V。它把这股数据流精准、稳定地“拆”成好几路,分别送给下游不同的串行器,最终驱动不同的屏幕。一路负担重的要服务仪表和HUD这两个高实时性要求的屏;另一路则可以负责语音助手、控制屏等对实时性要求不同的单元。这样一来,主芯片的输出瓶颈被巧妙化解,屏幕的扩展能力得到了数量级的提升。可以更灵活地规划屏幕布局,后期要增加或升级某块屏在架构层面的改动会小很多。这对越来越强调迭代速度的智能汽车来说太重要了。简化了布线,作为专业中继,会对信号进行重整和增强,确保传到每块屏幕时,依然是清晰、完整的数字信号。
MAX96789 是加串行,支持3K (2880x1080/60Hz),支持MST分流,估计是支持中控和HUD。i1568-sp是北京百瑞互联的模块,核心芯片是高通的QCA6688,是蓝牙和WiFI模块,神行者用了两个,应该一个对应前排,一个对应后排。
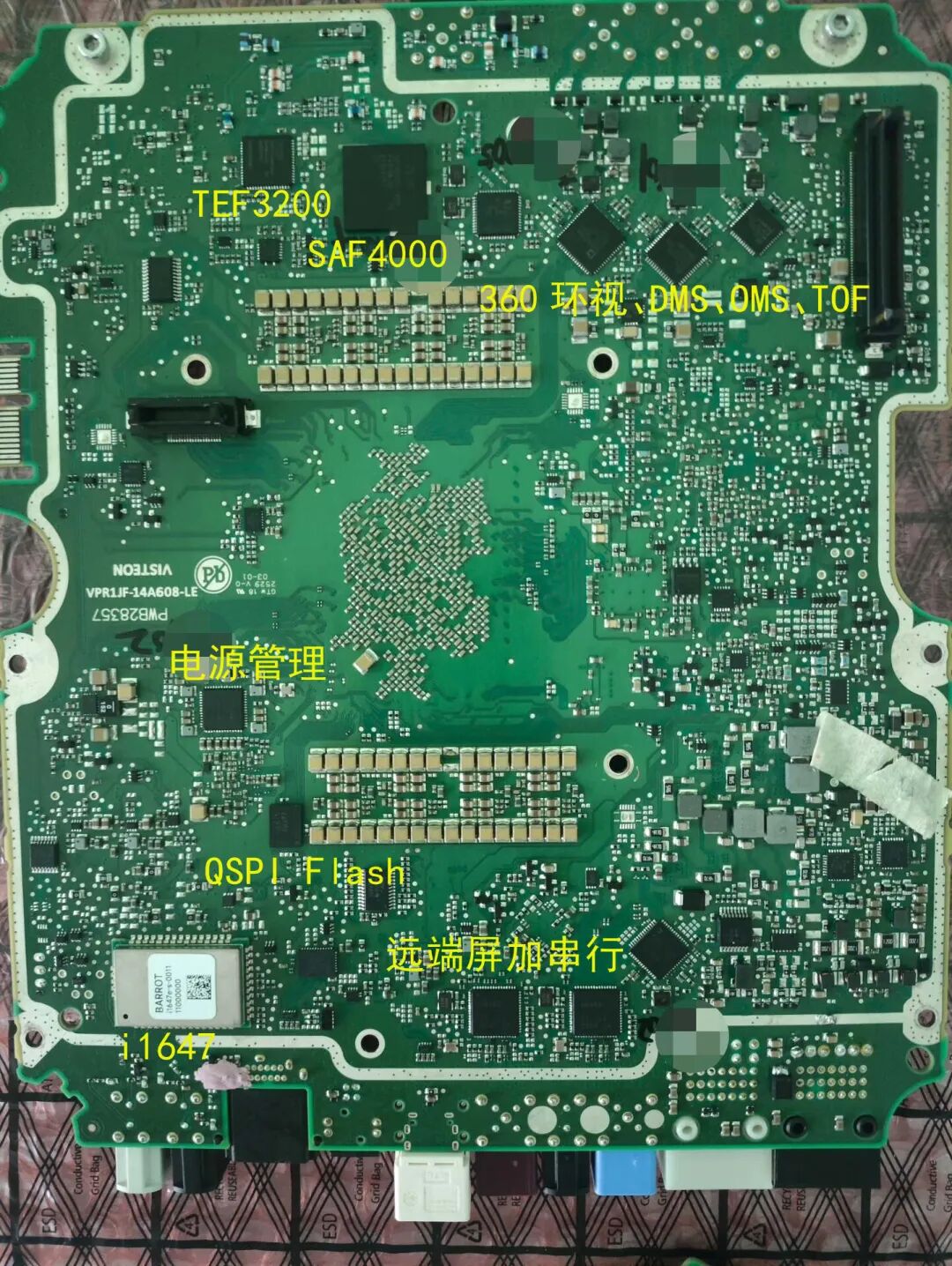
图片来源:闲鱼,文字部分为笔者加注
背面的芯片颇多,和国内设计大不相同,伟世通的双面设计难度更高,背面还有一个蓝牙模块即i1647e-s,与普通的蓝牙模块不同,这个蓝牙模块内部包含了NXP的KW47小型MCU,内部包括了两个CAN/CANFD端口,应该是做蓝牙钥匙的。
背面最大的芯片是恩智浦(NXP)的SAF4000EL。 SAF4000EL 是NXP推出的一款高度集成的软件定义多标准无线电处理器(Software Defined Radio Processor),专门用于处理全球范围内的广播音频标准。覆盖全球所有主要的广播音频标准,包括 AM/FM、DAB/DAB 和 HD Radio 等。
集成度高:单芯片解决方案,集成了软件定义的无线电架构和音频 DSP(数字信号处理器),减少了外部组件的需求。
架构:采用高度可编程的软件无线电概念,可通过固件更新支持未来的标准或功能改进。由此看出,这款车型是考虑到全球销售的。
与SAF4000EL比较近的还有一颗收音芯片TEF3200HN,这是对应DAB收音的。
背面主要是解串行和加串行芯片,还有为8397的QSPI Nor Flash。解串行主要是360环视、DMS监测、OMS生物探测、TOF手势识别。加串行主要是远端3-4屏。
神行者8的座舱域控制器,是截至目前最先进的座舱域控制器。

 VIP复盘网
VIP复盘网
