

以下内容我们就围绕智能驾驶行业,对相关问题展开分析梳理。首先,我们将从市场角度出发,对智能驾驶的行业概况、所面临的市场现状、具体政策环境及行业市场业态几个问题展开分析梳理,以帮助大家客观了解智能驾驶行业的当前市场现状;其次,我们将从技术角度,对当前智能驾驶行业备受关注的VLA 及世界模型两条技术路线进行具体分析。解决上述问题的同时,我们还将对智能驾驶行业后续的竞争格局及发展趋势进行展望,并在此基础上梳理相关企业的发展布局情况,希望能帮助大家更为全面、具体地了解智能驾驶行业。

AI大模型驱动智能驾驶进入新阶段
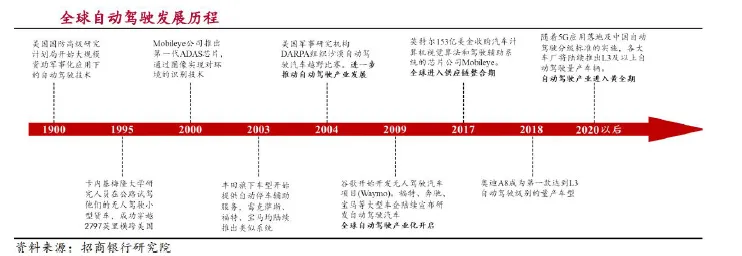
智能驾驶是汽车智能化的关键分支,技术始终是其发展的核心引擎。技术的每一次突破,都直接推动了安全性的显著提升,促使成本不断下降,而这两者又进一步决定了智能驾驶商业化落地的时间预期。回溯过往100年,全球智能驾驶发展历经四个阶段:
实验室探索阶段(1925~1999年):全球第一辆“自动驾驶”汽车可以追溯至1925年,其操作方式与现代玩具车类似,主要通过无线电控制技术实现其“自动驾驶”。60年代初,人工智能(Artificial Intelligence,AI)技术的引入标志着车辆控制系统从机械控制向电子控制的重大转变;80年代末,美国卡内基梅隆大学开启了自动驾驶技术的实验,进一步推动了这一领域的研究和创新。
商用化探索阶段(2000~2012年):2004年和2005年,美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)成功举办了两届无人驾驶挑战赛,这激发了众多商业机构对自动驾驶技术的投资和研发热情。2009年,科技巨头谷歌启动了其无人驾驶项目,标志着自动驾驶技术开始进入商用化探索阶段。
商用化加速阶段(2013~2019年):2012年,被誉为“深度学习之父”的Geoffrey Hinton引入神经网络(Convolutional Neural Networks,CNN)算法,标志着深度学习进入蓬勃发展的新纪元。自动驾驶技术也由此受益,通过与神经网络算法的结合实现了快速发展。2013年开始,传统车企和新兴创业公司纷纷布局无人驾驶,加速了无人驾驶技术的商用化进程。2015年特斯拉推出Autopilot功能,将自动驾驶技术整合到消费级电动汽车中;2017年奥迪推出了具有高级辅助驾驶选项的新A8车型。
AI大模型阶段(2020年至今):近年来,大规模的AI训练任务所需算力呈指数级增长,2012~2018年算力需求增长超30万倍,而超大规模预训练模型实现了算力突破,有效降低了AI应用的门槛。以Transformer为代表的大模型较CNN在大模型数据训练的优势更为突出,目前在自然语言处理领域几乎取代了RNN,并被引入计算机视觉领域,如特斯拉、华为、小鹏等均已宣布将Transformer引入自动驾驶感知框架。
当前智能驾驶已分化出两条核心路径——VLA和世界模型
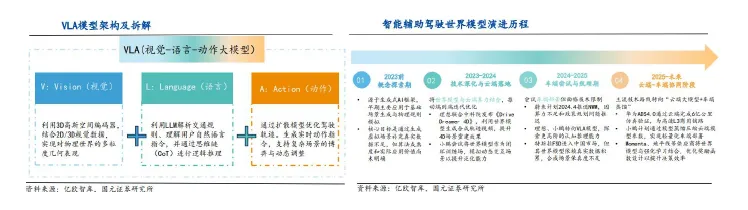
当前智能驾驶已分化出两条路径。2024年夏季以来,端到端(End-to-End)智能驾驶技术格局发生显著变化,从2023年“一家独大”的单一技术路径,正式演进为两大核心路线并行发展的态势。其中,第一条路线为以“视觉—语言—行为”(Visual-Language-Action,VLA)链路为核心的架构体系,第二条路线则是以物理推演为核心驱动力的世界模型(World Model)路线,VLA和世界模型并不是完全对立,而是两条目前并行发展的技术路线:VLA适合快速迭代、兼容现有量产平台,短期内易于落地。世界模型则代表了更底层的认知方式,强调物理规律和空间理解力,适合长期演进。
VLA架构:VLA架构的技术逻辑遵循“感知–理解–决策–控制”的全链路语义化转化,其核心流程可拆解为四步:首先通过图像传感器完成环境感知与图像识别;其次将视觉感知结果转化为可被大语言模型理解的语言Token(如“前方50米有静止车辆”“当前车道为潮汐车道”);再由大模型基于语言Token生成符合人类驾驶逻辑的驾驶建议;最后将抽象建议转化为具体的车辆控制轨迹,并通过实时反馈机制进行动态校正。
世界模型架构:与VLA架构依赖“语言中间层”的技术逻辑不同,世界模型路线通过绕开语言转化环节,直接将3D高斯表征、点云等空间感知数据输入大模型,在模型潜空间内完成物理规律推演(如车辆碰撞风险预判、行人运动轨迹预测),并直接输出车辆控制指令,形成“云端世界引擎 车端世界行为模型”的技术架构——云端世界引擎负责大规模场景的物理规律建模与预训练,车端世界行为模型则基于实时感知数据进行快速决策。

 VIP复盘网
VIP复盘网
