

梦瑶 发自 凹非寺
量子位 | 公众号 QbitAI
什么拧螺丝、叠衣服、左勾拳右勾拳,都太常规操作了!
大家伙不知道的是——
现在的机器人,已经能搬动几十公斤重的冰箱了:
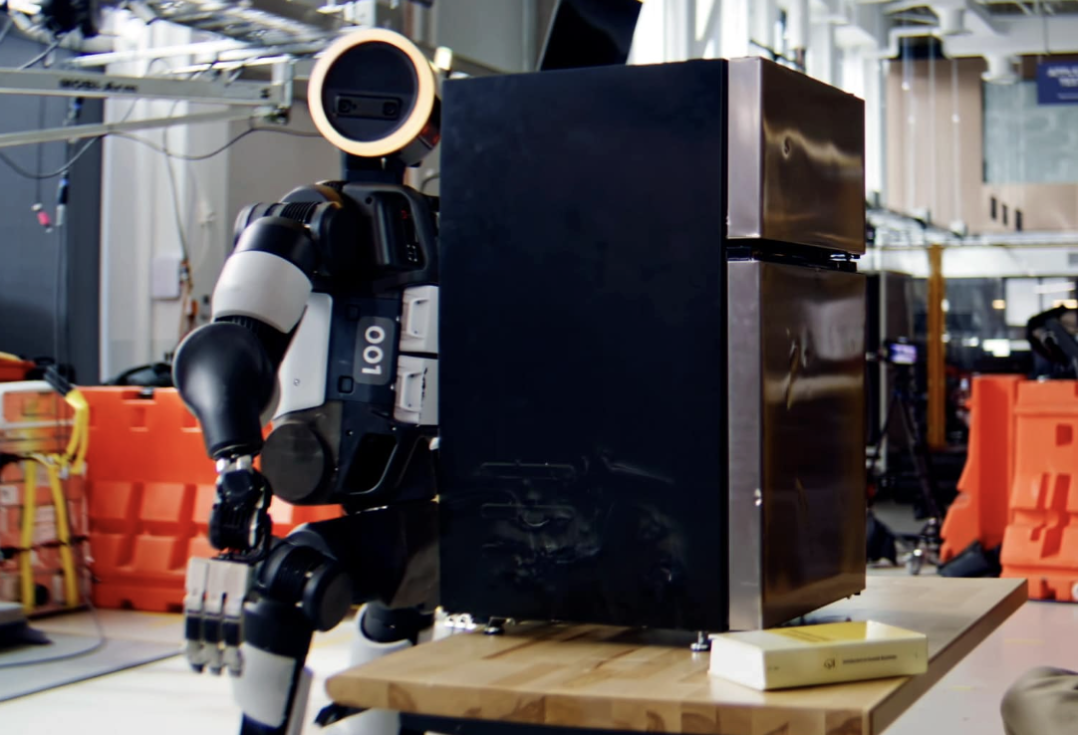
一个大深蹲,把一整台迷你冰箱狠狠抱起。
然后立刻扭着身子搬过来,放在工程师旁边,一套动作真·手拿把掐。
(u1s1,这机器人的手,是真不怕夹啊…)
不卖关子。
视频中这个手不怕夹能大搬特搬冰箱的机器人,正是波士顿动力最新一代人形机器人——Atlas。
看到这场面,我是绷不住了。
网友们也绷不住了,下面这位老哥直接说出来了我的心声:
我真的需要一个机器人,帮我摆脱那些伤髋又伤腰的重物(狠狠共鸣ing)!!
还有网友把注意力转到了其他奇奇怪怪的地方。
先夸一嘴机器人厉害,结果重点放到了在哪儿买一个无线冰箱上:
人类负责躺平,机器人负责跑腿搬东西。
突然感觉,躺在床上等一切自动送到嘴边、手边这事儿,好像也没那么科幻了??
一个会灵活「搬冰箱」的小小机器人
机器人整活儿大家都看到过,但整来整去也无非就是——
下下工厂、耍耍杂技、田径赛跑、酒店送送外卖这些,总的来说还是清一色的细巧活儿。
真不是厂商们不想搞点新鲜的…
主要还是目前机器人装的身体和大脑,不太支持小机器人们做重活儿。(doge)
大家都知道,机器人确实能看到物理世界。
但扎心的是,仅靠摄像头反馈,小机器人们是无法精准感知重量和接触力的…..

不仅如此,目前大多小机器人干活儿时还只用手指尖操作,全身协调能力有点不太在行。
也正因为这样,过去那些偏看图学动作的训练方法,一碰到这种需要真实力量和复杂接触的任务,就很容易卡壳。
好巧不巧。
Atlas这个小机器人,打出生起的定位就是「为干重活儿」而生的。
说的更直白一点就是,Atlas这套行云流水地搬运动作,更像是在模拟咱们人类搬重物时的身体反应。
大家生活中应该都有类似经历。
我们搬一个特别沉的箱子时,其实很少只靠手指的力量硬拎。
反倒是会下意识地会用前臂、肱二头肌、腰腹和腿一起狠狠发力!!
再加上碰到东西太沉时,我们还会不自觉先屈膝,把重物从地上顶到大腿前侧,再借助「身体支撑」完成搬运。
Atlas搬冰箱的动作逻辑,其实也有点接近这个过程——
它真正执行任务时,并不是提前写死一套伸手—抓取—抬起—放下的固定流程,而是在和冰箱接触、受力、移动的过程中不断调整。
它会先判断这东西大概有多沉、重心在哪儿、身体该怎么贴过去,再顺着冰箱的形状调整姿态。
进而让自己的躯干、手臂和腿一起参与发力。
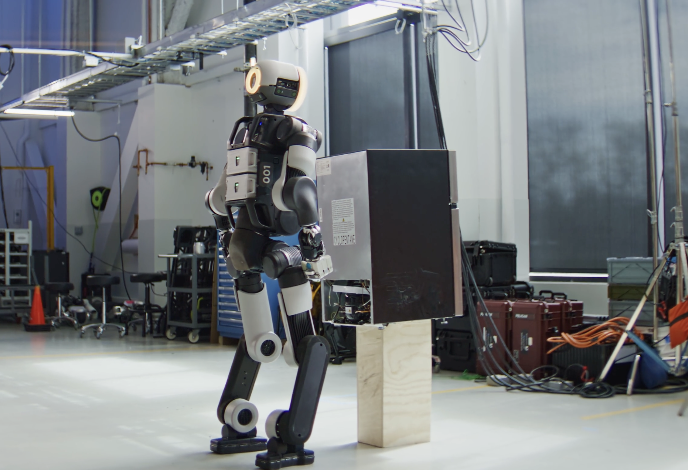
于是我们会看到,当Atlas抱起冰箱前有一个明显的下蹲和贴近动作,be like:
此外很有意思的是,拍这段视频前,工程师还故意给冰箱加了点难度——
往里面塞了一堆实验室杂物。
这就意味着,冰箱不只是重,里面的重量还不均匀,搬的过程中,杂物可能来回滑,重心也会跟着变。
不仅如此,Atlas训练时面对的是50-70磅负载,大概23-32公斤。
但实战里,它搬起来的是一台装满东西、总重超过100磅的冰箱,也就是45公斤以上。
等于训练时让它练三十公斤,真上场直接加码到九十多斤,多出来那一大截重量,人家硬是稳稳接住了…..
(Atlas:多说无益,用一段舞蹈表达一下俺的进阶能耐吧~)
见识到这身本事的网友们,已经等不及了。
下面这位老哥,已经迫不及待让机器人给自己从冰箱里拿饮料了。
啊,说错了,应该是拿冰箱:
Atlas是怎么练出搬冰箱这套动作的?
刚才说的都是Atlas在动作上的小伎俩。
但大家也知道,Atlas也不是一上来就被丢到冰箱面前,自己硬悟的。
事实上技术团队教它搬冰箱,背后靠的是一套参考轨迹、奖励函数、仿真训练、真机测试、迭代的强化学习训练路线。
第一步,就是先给它看一个「参考动作」——
也就是让Atlas先知道:大概怎么靠近冰箱,怎么下蹲,怎么把身体贴过去,怎么抱住,再怎么起身转移。
这个参考动作可以来自人工遥控,也可以是一段动画轨迹,Atlas这次搬冰箱,用的就是一段相对简单的动画轨迹。
but!光看一遍示范,肯定不够。
就像人学搬东西,别人演示完了,你照着一抬,可能下一秒就发现:手滑了、腰顶不上、东西歪了。
于是在第二步,工程师给Atlas设计了一套「打分规则」。
比如,冰箱要尽量稳稳待在手里,位置和方向不能乱摆,搬的过程中,机器人和冰箱还会被施加一些推拉干扰,让它学会在意外发生时别偏离任务。
这一步其实有点像教小孩端水,你不能只说把水端过去,还得告诉他,杯子别歪,水别洒。
奖励函数的作用也在这儿,它会告诉Atlas,什么动作更接近搬得稳,什么动作一看就要翻车!!
接下来,才是整个训练量最最最最关键的地方——「仿真」。
事实上Atlas不可能天天在实验室里摔冰箱、砸地板、撞工程师,所以大部分练习先放在虚拟世界里完成。
工程师会让它在GPU上并行跑大量仿真。
反复面对各种形形色色的冰箱:有的位置更偏,有的重量更大,有的地面更滑,有的抓握状态更别扭。
所以说,Atlas在虚拟世界里还是提前吃了很多亏的……
这些变化的目的,就是不让它只会应付一个标准答案。
以后真遇到重量、位置、摩擦都不一样的物体,它也得能自己调姿态、找平衡、重新分配力量。
仿真里练得差不多,那就该到现实世界真刀真枪地练一练了。
波士顿动力很喜欢一句工程哲学叫——build it, break it, fix it,也就是造出来,搞坏它,再修好它。(doge)
所以真机测试阶段,翻车反而很重要。
刚开始肯定有问题,手指打滑了、冰箱抱起来歪了一下、走两步崴脚了,这些都正常。
每一个翻车现场,都被工程师老老实实记下来。
然后嘛——
翻车,回炉;再翻车,再回炉,再翻车,再回炉……
一轮轮下来,Atlas才慢慢从照着动作做,练到遇到变化也能自己调整。
这下,也是多少有点机器人版「肌肉记忆」内意思了。

最后的最后。
我瞎说的啊。
有没有可能——
我们这代人,是人类历史上最后一批需要自己搬重物的人类了?

 VIP复盘网
VIP复盘网
