

灵巧手是机器人夹爪的升级,是人形机器人的核心价值之一
1、为什么关注灵巧手
人形机器人的核心能力是泛化性,而灵巧手是体现这种泛化性的核心。工业机器人一般使用专用的夹爪进行操作。夹爪是针对特定任务设计的执行器,具有成本低、效率高的优势,但通用性差。而人形机器人的操作对象具有不确定性,需要执行器具备高度的灵活性,也就是需要灵巧手。我们认为人形机器人所提供的价值,将主要通过灵巧手的方式展现。
灵巧手是人形机器人成本占比最高的零部件。不同人形机器人的方案不同,灵巧手的成本占比也有波动。 目前灵巧手价格 占人形机器人整机成本约 20%-30%,是占比最高的零部件。
当前阶段,灵巧手存在较大的升级优化空间,是产业链瓶颈环节。 当前灵巧手 还只能完成人手的部分功能软硬件均有较大提升空间 是当前阶段人形机器人硬件上的最大瓶颈。马斯克也曾坦言,灵巧手的研发难度和工程量可能占到整机开发的一半。
从AI数据闭环角度,灵巧手是人形机器人和外界交互的桥梁,是从物理世界采集数据的窗口。因此,灵巧手是人形机器人传感器最丰富的零部件,在 AI的数据闭环中有独特意义。
图表1:夹爪 VS 灵巧手

资料来源:钧舵机器人Jodell Robotics, 因时,五矿证券研究所
2、灵巧手三大传动方案详解
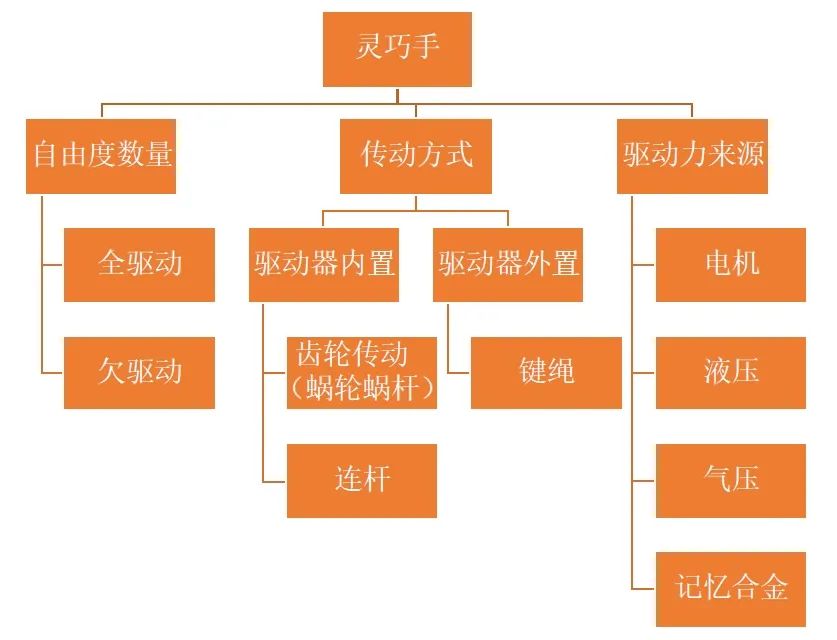
当前阶段,灵巧手方案尚未定型,技术路线多样。可以从自由度数量、驱动方式、驱动力来源等多个角度进行分类。其中,传动方式是最重要的分类依据。依据传动方式的不同,灵巧手的方案可以分为三大类:齿轮传动(包括蜗轮蜗杆)、连杆传统、腱绳传动。其中齿轮传动、连杆传动的驱动器位于灵巧手内,而 腱绳传动的驱动器一般位于手臂,位于灵巧手外。
图表2:灵巧手分类
资料来源:五矿证券研究所
图表3:灵巧手三大传动方式对比
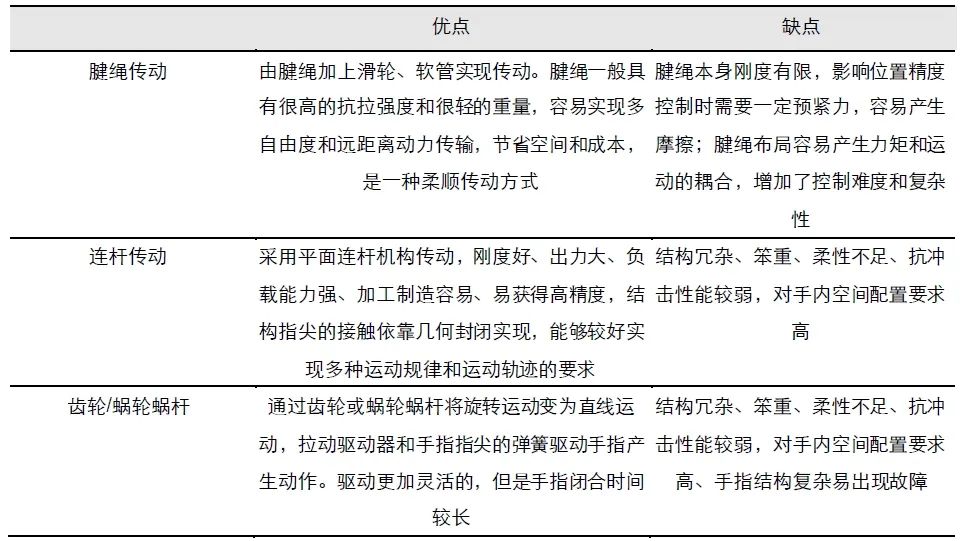
资料来源:灵心数据智能平台, 五矿证券研究所
齿轮传动(驱动器内置):
该方案的电机位于灵巧手手指, 通过齿轮或定时皮带驱动关节的结构。这种结构可能具有较高的关节驱动效率,手部的结构也容易布置。这种方案的缺点主要在于:1)手的大小和性能高度依赖于电机,尤其是手指部分。在当前的电机技术下,很难将手的体积做到正常人类大小;2 由于电机的重量,手指部分的惯性较高,因此需要复杂的控制机制 3)受限于空间,力传感器的布置困难 。
电机直接驱动方案的代表包括DLR-HIT-Hand II 和 KITECH-hand。
DLR-HIT-Hand II 是哈尔滨工业大学和德国航空航天中 心联合设计的一款灵巧手,该手具有15个自由度,五指相同,每个手指有3个自由度和4个关节,后两个关节机械耦合。该手采用超扁平BLDC电机和微型谐波驱动器。受限于硬件,该手的尺寸、重量都偏大。比如该手使用的谐波减速器直径为20mm,单指长度可达 169.1mm,整手重量1.5kg。DLR-HIT-Hand II手部还配备了多个传感器,如每个关节的应变片式关节扭矩传感器、特定的关节角度传感器、指尖的六维传感器等 。
图表4:DLR-HIT-Hand 第一代(左)和第二代(右)

资料来源:Multisensory Five-Finger Dexterous Hand The DLRHIT Hand II, 五矿证券研究所
图表5:DLR-HIT-Hand II的手指结构
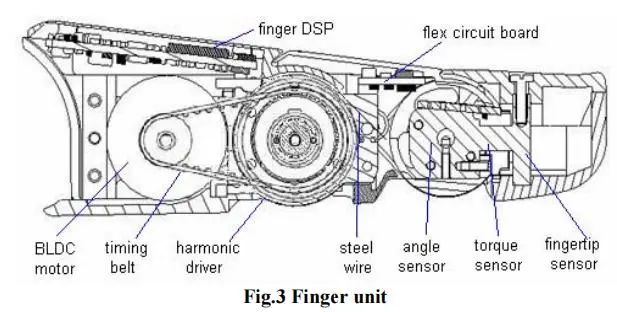
资料来源:Multisensory Five-Finger Dexterous Hand The DLRHIT Hand II, 五矿证券研究所
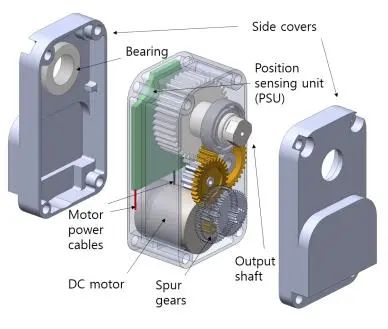
KITECH-hand是一款采用商业紧凑型伺服电机的灵巧手执行器尺寸为35.8 mm*19.5 mm*25 mm。执行器模组位于手指部位,经齿轮减速后输出扭矩,具有可逆驱动性,位置传感单元可高精度测量关节位置。
图表6:KITECH-hand使用的伺服电机
资料来源:KITECH-Hand A Highly Dexterous and Modularized Robotic, 五矿证券研究所
图表7:KITECH-hand手部结构
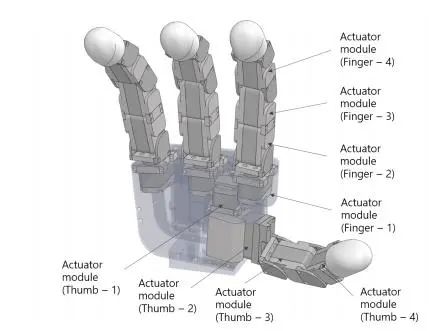
资料来源:KITECH-Hand A Highly Dexterous and Modularized Robotic, 五矿证券研究所
连杆传动(驱动器外置):
连杆传动方案的电机一般位于手掌部位,通过连杆将电机运动传递到手指。连杆传动具有双向控制关节、坚固性和易于制造和维护等优点 。连杆相对较厚且坚硬,较难实现像腱绳方案一样的高灵巧性。
但连杆方案的灵巧度近年来也有明显提升。一个高自由度的连杆方案灵巧手案例是ILDA灵巧手。ILDA手基于连杆驱动机制,具备15自由度(20个关节)、指尖力34N、紧凑尺寸(最大长度218mm)、重量1.1 kg。ILDA灵巧手可以在掌指关节(MCP)实现2-DOF运动,在近端指间关节(PIP)实现1-DOF运动。
ILDA所有手指都采用相同的结构。每根手指需要有三个电机、三个联轴器、三个滚珠丝杠以产生线性运动、三个LM导轨和一个手指框架。ILDA使用直径为8毫米的直流电机(DCX 8 M Maxon)和一个减速比为 16:1的齿轮箱(GPX8 Maxon。ILDA在每个指尖都配置了六轴力/扭矩(F/T)传感器,确保了手的力感知能力。
图表8:KITECH-hand手部结构
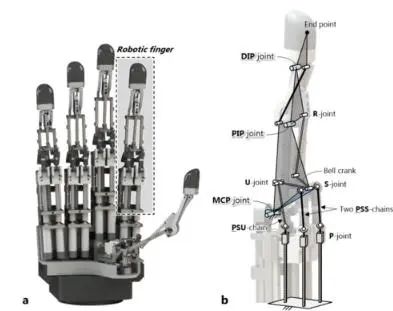
资料来源:Integrated linkage-driven dexterous anthropomorphic robotic hand, 五矿证券研究所
图表9: ILDA灵巧手手指的零部件
资料来源:Integrated linkage-driven dexterous anthropomorphic robotic hand, 五矿证券研究所
腱绳传动(驱动器外置)
采用腱绳方案的灵巧手驱动器一般布置于前臂,并通过腱绳连接到关节以传递驱动力。腱绳方案的手从结构上来说是最接近人类驱动机制的。腱绳传动方案最大的优势就是灵活。腱绳方案可以轻松实现 20个以上的自由度。但腱绳方案的缺点也明显:1)肌腱需要穿过关节旋转轴的结构或特殊的肌腱连接结构,装配维护的复杂性较高。 2)腱绳在长时间工作中容易产生断裂和蠕变。 3)由于摩擦增加而降低驱动效率,也增加了控制的难度。NASA 开发的Robonaut手、DLR 开发的 DLR Hand Arm System以及Shadow Robot Company开发的 Shadow 机敏手可以被视为具有此类机制的代表性手。
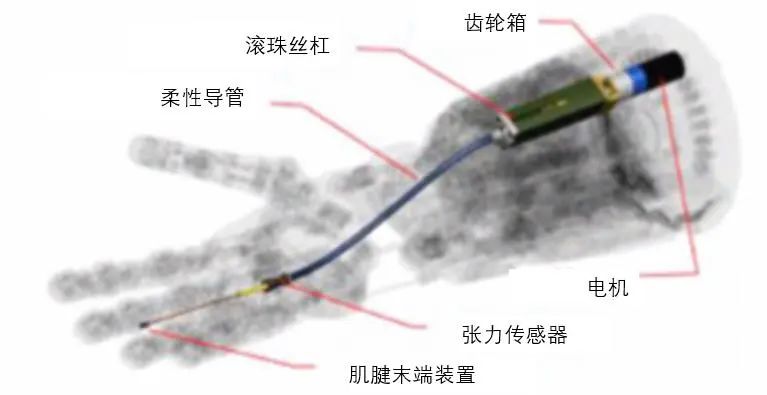
Robonaut2(简称 R2手)是NASA和通用汽车于2012年研发的灵巧手。R2手的前臂是一个完全独立的单元,所有电机都被安装在前臂,通过6根导线进行通电和通信。手和前臂最大直径127mm,从基部到手掌中心长304mm,有效载荷超9kg整个手臂有14个自由度(手部12个自由度 腕部2个自由度)。R2手 的大小和人类手部大小相当,手指完全伸展时指尖力可达 2.25kg。
R2手的驱动器采用了 滚珠丝杠将旋转运动变为直线运动,进而对腱绳进行拉伸。R2手的腱绳材料由Teflon和Vectran混合编织,腱绳直径1.2mm,断裂强度181kg。为了提升耐磨性,在编织层中增加了 PTFE。R2手还安装了腱绳的张力传感器(tendon tension sensors)用来感知腱绳的张力。
图表10:Robonaut2灵巧手
资料来源:The Robonant 2 Hand - Designed To Do Work With Tools, 五矿证券研究所
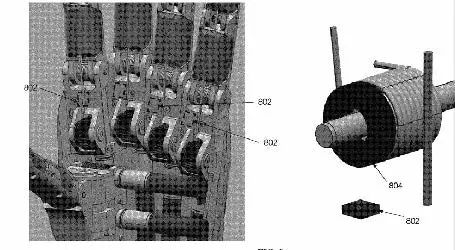
图表11:R2手指的驱动器结构
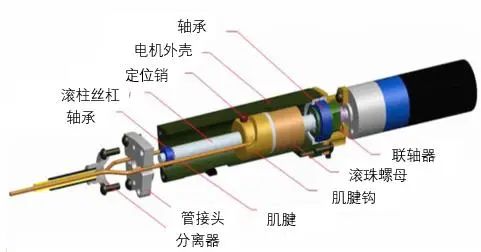
资料来源:The Robonant 2 Hand - Designed To Do Work With Tools, 五矿证券研究所
图表12:R2手的电机布置
资料来源:The Robonant 2 Hand - Designed To Do Work With Tools, 五矿证券研究所
图表13:R2安装了传感器测量腱绳在管道中的张力
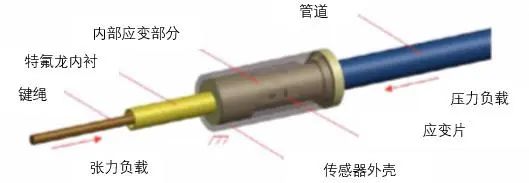
资料来源:The Robonant 2 Hand - Designed To Do Work With Tools, 五矿证券研究所
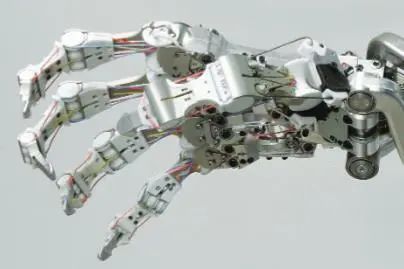
DLR Hand Arm System是德国宇航中心DLR于2010年设计的绳驱灵巧手。DLR Hand Arm System在手部设计19个自由度(另外还有2个被动自由度),在腕部设计2个自由度,共设计21个自由度(考虑被动自由度共计 23-Dof )。DLR Hand Arm System采用“拮抗驱动”(antagonistic actuation)方案,每个自由度都通过2个电机和2个弹性元件来“拮抗”的驱动。所以 DLR Hand Arm System的前臂一共有42个电机和弹性元件。
对DLR Hand Arm System,蠕变不是最大的限制因素,键绳的耐磨性、如何固定肌腱、抗弯折性、颜色(便于组装维护)更值得关注。DLR Hand Arm System一开始使用了钢丝绳,但钢丝绳存在安装不便、频繁弯折寿命不长的问题。作者综合考虑了 Kevlar(杜邦公司旗下的芳纶纤维)和Dyneema。 由于Kevlar纤维打结后强度会显著下降,因此最终选择了 Dyneema。DLR在 2015年推出的space hand上,出于对蠕变性的考虑,使用了zylon(PBO)纤维编织成的绳子替代 Dyneema 腱绳 。
图表14:DLR Hand Arm System前臂集成了大量的电机
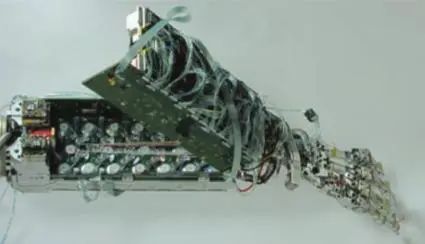
资料来源:The hand of the DLR Hand Arm System: Designed for interaction, 五矿证券研究所
图表15:DLR Hand Arm System
资料来源:Antagonistically Driven Finger Design for the Anthropomorphic DLR Hand Arm System, 五矿证券研究所
图表16:拮抗驱动设计方案
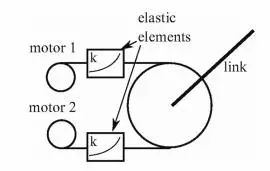
资料来源:Antagonistically Driven Finger Design for the Anthropomorphic DLR Hand Arm System, 五矿证券研究所
图表17:DLR Hand Arm System手的掌指关节
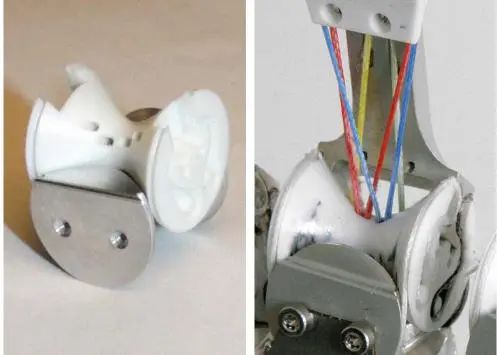
资料来源:Antagonistically Driven Finger Design for the Anthropomorphic DLR Hand Arm System
3、灵巧手方案对比:国内侧重连杆,海外侧重腱绳
人手具有27个自由度。一般认为当灵巧手具备17个自由度及以上可以实现接近人手的灵活性。 17个自由度是我们判断一款灵巧手性能的重要参考。
国内灵巧手企业以连杆传动方案为主,如兆威机电、因时、灵心巧手(L10\L20)均使用连杆传动方案。目前使用连杆传动方案也可以做到17个自由度以上 ,在耐用性、灵活性上取得一个较好的平衡 。
海外企业更青睐腱绳方案,追求高灵活性。 比如特斯拉新一代灵巧手采用腱绳方案可以做到22个自由度,高度灵活拟人。
特斯拉:腱绳传动的代表
特斯拉的灵巧手经过数次迭代升级。其中11自由度版本的灵巧手公开了专利,尽管不是最新方案,但对我们了解特斯拉的思路亦有帮助。特斯拉11自由度版本 灵巧手有如下特点:
11个自由度,其中主动自由度6个,也就是说这是一款欠驱动的灵巧手。特斯拉认为腱绳方案 欠驱动,随着接触位置的变化,结构件的位置也会移动,接触点也随之变化。这样的手指具备更多的适应性。
腱绳方案中的摩擦是一大缺点。特斯拉使腱绳保持浮动(floating),保持了一定的灵活性。
腱绳在一根细管中移动末端可以连接张紧器(tensioner)。自动张紧器常用于汽车发动机或工业机械,作用是使皮带或链条始终保持恒定张力并自动调节张力。
11自由度版本使用了蜗轮蜗杆进行传动。我们推测主要是蜗轮蜗杆可以做到大减速比,可以提高手部的负载能力。
图表18:特斯拉第一代灵巧手手指零部件
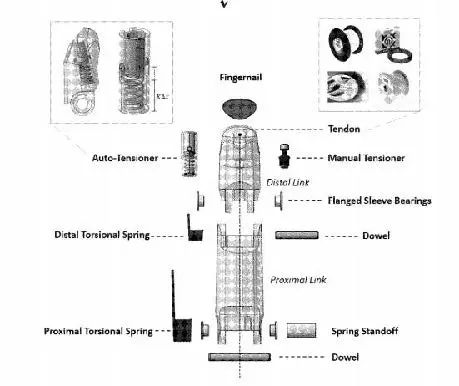
资料来源:特斯拉,五矿证券研究所
图表19:特斯拉第一代灵巧手采用蜗轮蜗杆
资料来源:特斯拉, 五矿证券研究所
图表20:特斯拉WE ROBOT活动展示的新一代灵巧手

资料来源:机器人大讲堂, 五矿证券研究所
特斯拉在2024年 WE ROBOT活动中展示了新一代灵巧手,依然保留了绳驱方案,自由度提升至 22-Dof,高度灵活拟人。从图片可以看出,手腕部有大量的腱绳,电机被放置于前臂部位。
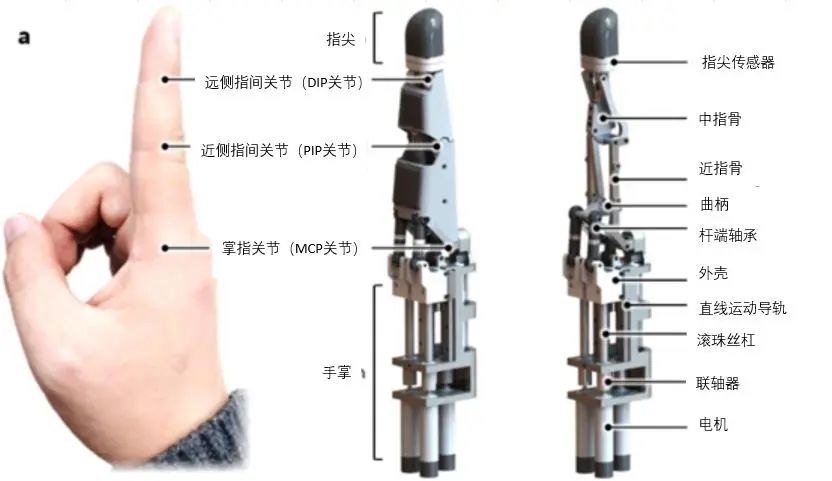
因时:基于微型伺服电缸的11自由度方案
因时机器人创立于2016年,是一家专注于微型精密运动部件研发制造的专精特新企业主营产品包括微型伺服电缸和仿人五指灵巧手,并在微小型、高精度和力控技术等方面具有领先优势。因时机器人研制的仿人五指灵巧手2019年上市,是国内首款商业化可量产的五指灵巧手,产品突破多项技术瓶颈,目前成本大幅降低,并获得国家重点研发计划“智能机器人”重点专项支持。
因时仿人五指灵巧手单手具有11个自由度, 其中6个主动自由度。 采用直线推杆的方式进行驱动器的设计,电机位于手掌位置,内置连杆和弹簧进行传动。 因时的 微型伺服电缸的内部集成了空心杯电机、精密减速器、丝杠传动机构、力传感器、位置传感器 ,是最核心的零部件 。
图表21:因时灵巧手内部结构

资料来源:CSDN, 五矿证券研究所
灵心巧手:连杆传动的高自由度方案
灵心巧手成立于2023年7月6日,专注于开发以灵巧手和云端智脑为核心的具身智能平台。灵心巧手在2024年第五届中国机器人行业年会荣获 LeadeRobot2024年度具身智能产业赋能奖、 LeadeRobot2024年度机器人末端执行器最佳适配奖。在2024年中关村仿生机器人大赛荣获灵巧手领域第一名。灵心巧手月销量已突破100只。
灵心巧手的Linker Hand采用单指模块化设计,可以减轻负载,提高速度和灵活性,降低维护成本;配备先进的多传感器系统,能够实现对环境的精确感知交互 在接触到物体时,精确捕捉到其接触物体的三维力,感知所接触物体表面的纹理和温度差异。
2025年,灵心巧手发布Linker Hand灵巧手钛金版 T10、T20,售价分别为 19999元和 49999元。 2025年工博会,灵心巧手进一步发布了售价88.88万元终结者版本Linker Hand Ultra(25 自由度,绳驱传动)和 0.88万的入门级产品 Linker Hand O7(7自由度,连杆传动)。
图表22:Linker Hand Ultra

资料来源:灵心巧手, 五矿证券研究所
图表23:Linker Hand O7

资料来源:灵心巧手, 五矿证券研究所
图表24:灵心巧手产品展示
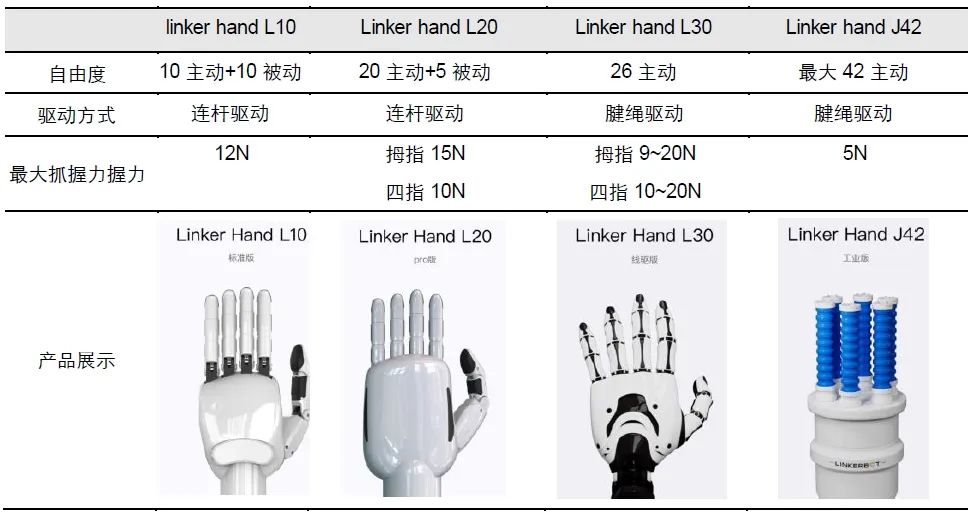
资料来源:灵心巧手, 五矿证券研究所
兆威机电:连杆 直驱组合方案
2024年 11月 兆威机电正式发布手指集成驱动的高可靠灵巧手 。兆威机电本次发布的仿生灵巧手具备以下特点:
高灵巧性。该灵巧手配备17个主动执行单元,其中单指节拥有3个及以上主动执行单元,准确模拟人手部的抓握等精细动作,赋予机械手更好的灵活性与精确度。指节电机独立驱动指尖集成传感器 ,手长 238.5mm 手宽 88mm,手厚 40.7mm 负载 3kg,重量 <1kg。
高可靠性:单手10年设计寿命,关键组件全部自研。
高精度:微驱控制器主频 600M 且采用一拖六结合磁编方案,电机控制精度高。每个指节采用电机搭配微型减速器和丝杆驱动,结合高密度、高集成与布局优化的 PCB 设计,实现精确的动力输出和快速响应。
我们可以进一步从兆威机电的灵巧手专利中观察其技术方案:兆威机电的灵巧手专利技术中,掌指控制单元采用无刷直流电机,手指控制单元采用步进电机,结合直线执行器应用,通过电机旋转搭配微型减速器和丝杆实现精确的动力输出和快速响应。
图表25:兆威灵巧手伺服系统

资料来源:兆威机电, 五矿证券研究所
图表26:兆威机电灵巧手

资料来源:兆威机电, 五矿证券研究所
图表27:市场灵巧手方案对比

资料来源:兆威机电、灵心巧手、因时、机器人大讲堂, 五矿证券研究所
灵巧手硬件五大方向
从需求弹性和产业链稀缺性角度,我们推荐投资者关注五大方向:微型电机 、驱控芯片、微型丝杠、腱绳、传感器。
1、微型电机:BOM占比高,价值量显著
灵巧手对空间要求苛刻,一般使用微型电机。目前主流方案包括空心杯电机和无刷直流电机。
空心杯电机属于直流永磁电机,与普通有刷、无刷直流电机的主要区别是采用无铁芯转子,也叫空心杯型转子。由于转子结构变化,空心杯电机体积小巧 重量和转动惯量大幅降低,具备了铁芯电机所无法达到的控制和拖动特性。 此外转子结构彻底消除了因为铁芯形成涡流而造成的电能损耗,具有突出的节能特点。
空心杯电机也可以细分为无刷空心杯电机和有刷空心杯电机。两者在转向方式、转子构成、寿命、转速、抗干扰等方面性能存在差异。
图表28:无刷空心杯电机VS有刷空心杯电机
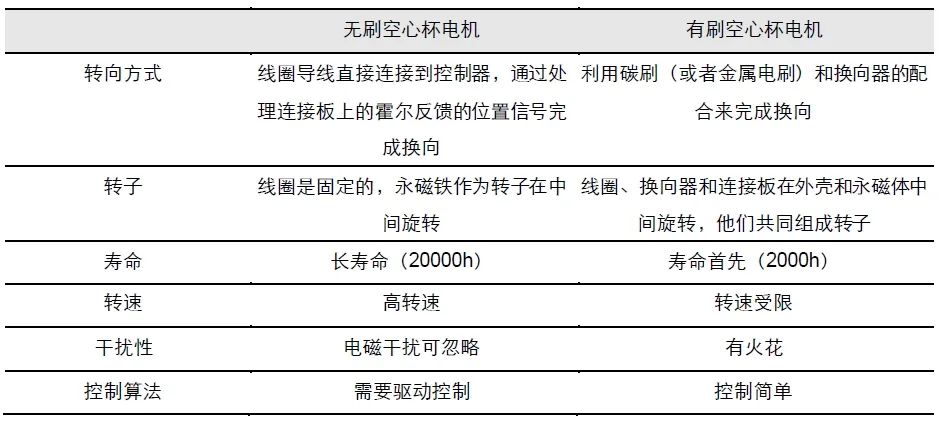
资料来源:机械电气电机杂谈, 五矿证券研究所
图表29:无刷空心杯电机结构
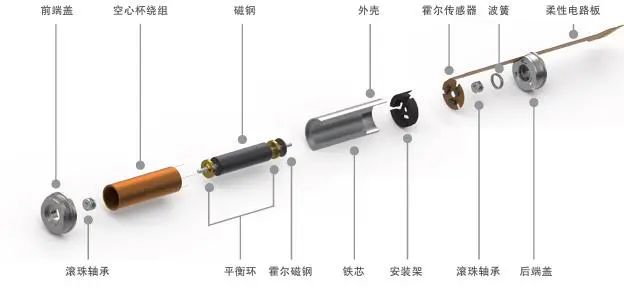
资料来源:鸣志电器, 五矿证券研究所
图表30:有刷空心杯电机结构
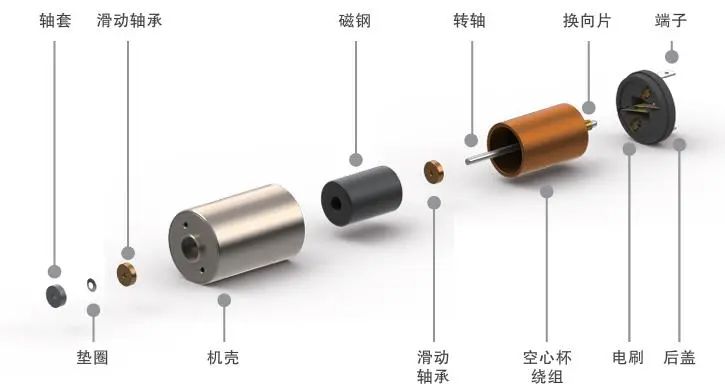
资料来源:鸣志电器, 五矿证券研究所
空心杯电机的核心技术壁垒在于自支撑绕组技术上。
首先,由于空心杯电机所有漆包线都是悬空绕线,内部没有任何支撑,对加工精度的要求非常高。 其次,目前我国生产空心杯电机多采用卷绕式生产技术,生产效率较低,废品率高 。
空心杯电机线圈的卷绕方式包括直绕组、斜绕组、同心式绕组、叠绕组等 。
图表31:空心杯电机绕线方式

资料来源:drylin, 五矿证券研究所
如果采用腱绳方案,可以将电机安置在前臂使用直流无刷电机。将电机安置在前臂后,获得了较大的空间,可以使用直流无刷电机降低成本。 相比有刷直流电机,无刷直流电机省去了碳刷,采用电气控制系统对线圈进行控制,增加了成本及电机的复杂性,但效率更高、寿命更长、转速更大。
图表32:直流无刷电机价格显著低于空心杯电机
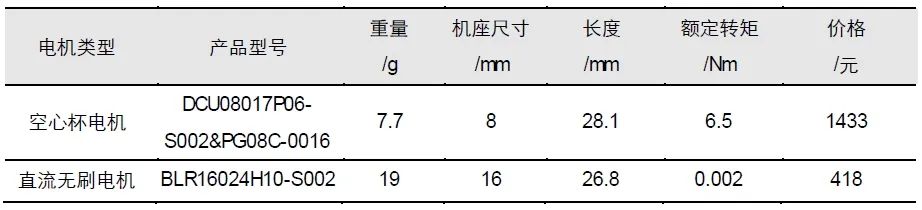
资料来源:鸣志电器, 五矿证券研究所
图表33:有刷直流电机VS无刷直流电机
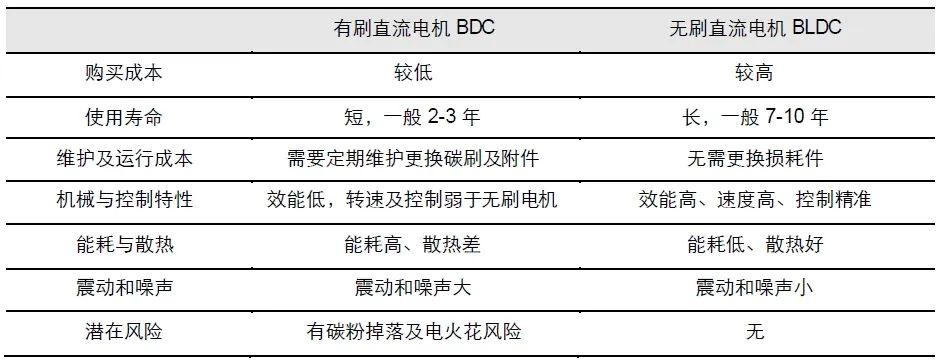
资料来源:倍捷科技,五矿证券研究所
2、驱控芯片:国产替代空间广阔
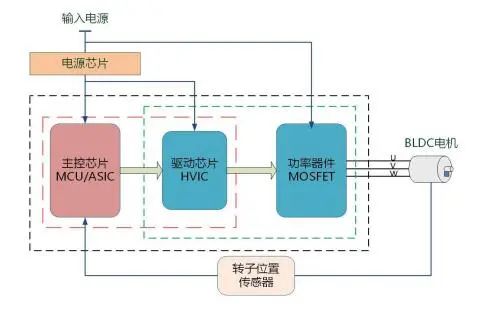
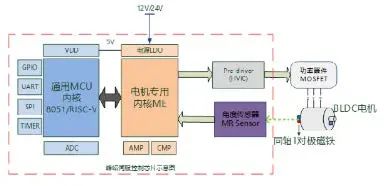
电机的驱控芯片包括主控芯片MCU、驱动芯片、功率器件、传感器等。驱控芯片通过集成控制算法、功率驱动和保护功能,实现电机的高效、安全与智能化运行。其性能直接影响设备的精度、可靠性和能效 。
图表34:电机驱动控制示意图
资料来源:峰岹科技, 五矿证券研究所
图表35:电机控制板

资料来源:峰岹科技,五矿证券研究所
人形机器人要做到动作协调,对电机的驱控芯片也提出了新的要求。
高性能、高稳定。人形机器人要求灵巧操作,对完成 转矩的控制 的时间提出了较高要求。
低功耗。 人形机器人非常重视电机效率,这不光涉及到电机本身,也涉及到电机的控制架构。
高集成、小尺寸。灵巧手对尺寸要求高,需要严格控制驱控芯片的尺寸。在单一晶圆上集成了电源、驱动或功率器件,可有效降低整体方案成本,减少元器件面积。
图表36:峰岹科技的方案可以降低成本、减少元器件面积
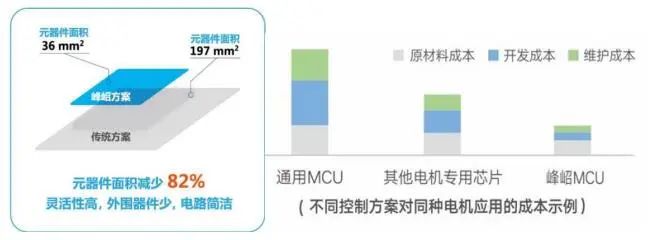
资料来源:峰岹科技, 五矿证券研究所
电机驱控芯片行业逐步走向单芯高集成,价值量有提升可能。传统的方案采用分立器件实现,新一代方案已经可以把传感器、通用内核和专用内核以及pre-driver都放在了一起 ,进一步提升集成度,降低成本。
图表37:峰岹科技的芯片集成角度传感器
资料来源:峰岹科技,电子工程专辑,五矿证券研究所
图表38:峰岹科技的关节方案

资料来源:峰岹科技, 哔哩哔哩,五矿证券研究所
电机驱控行业国产化率偏低,国产替代空间广阔。以BLDC电机驱控芯片为例,全球前十大厂商仅峰岹科技一家中国企业,市占率仅4.8%,国产替代空间广阔。
图表39:2023年中国市场前十大BLDC电机主控及驱动芯片公司

资料来源:峰岹科技, 五矿证券研究所
依托产业链环节的关键卡位 ,优势企业向产业链上下游延伸。2025年1月,峰岹科技与三花控股期签署了《合作框架协议》,双方同意出资设立合资公司(三花控股持股50%,峰岹科技持股36%)。合资公司专注于空心杯电机(无槽永磁交流电机)本体及相关产品的研发、设计、制造和销售。
3、微型丝杠:用量有望大幅提升
我们看好微型丝杠在灵巧手的用量大幅提升。微型丝杠常与高精密减速器、高性能空心杯电机、传感器以及伺服控制系统集成为微型伺服电动缸。这种集成设计可以 在保证更小体积的基础上实现驱控一体化,具有体积小、精度高、负载大等技术特点。
图表40:因时的微型伺服电缸
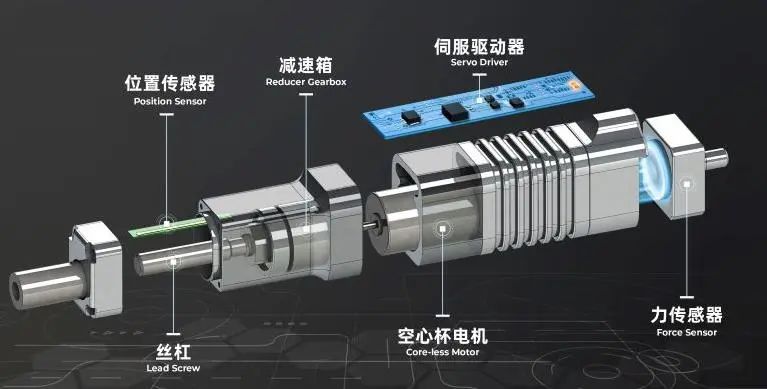
资料来源:因时, 五矿证券研究所
部分方案微型丝杠的单手用量可达15个以上。 参考 ILDA手的连杆结构,每个手指对应3个微型丝杠,单手需要15个微型丝杠。参考R2手的绳驱结构,每个自由度需要一个微型丝杠。假设某款手具备17个主动自由度,意味着至少需要17个微型丝杠。
高精度微型丝杠是微型伺服电缸的核心。 丝杠的作用是把旋转运动变为直线运动 。蜗轮蜗杆也可以将旋转运动变为直线运动,比如特斯拉第一代灵巧手就使用了蜗轮蜗杆 。但丝杠的精度高、传动效率高、稳定性好、噪音低,适用于高精度传动设备。而蜗轮蜗杆承载能力强、通用性强,更适用于大负载场合 ,比如减速机、升降机、工业机械等。
微型丝杠或主要以滚珠丝杠为主。参考ILDA、R2手的结构,均采用了滚珠丝杠。 我们认为滚珠丝杠的传动效率高(一般为 85%~95%),同时加工成本较低,将会成为微型丝杠的主流选择。
微型行星滚柱丝杠性能更好,部分方案也会采用。行星滚柱丝杠的传力接触面积大大增加,具有更大的承载力和更高的机械刚性。在相同丝杠直径下,行星滚柱丝杠比滚珠丝杠承载能力提高6~15倍;相同负载下比滚珠丝杠节省1/3空间。由于滚珠丝杠的滚珠在运行时会发生碰撞,而行星滚柱丝杠避免了这个问题,因此行星滚柱丝杠还可以输出更高的直线速度。行星滚柱丝杠转速可达6000r/min,直线速度可 2m/s以上,加速度可达1000rad/s2以上。传动效率方面,虽然行星滚柱丝杠是滚动摩擦,但由于加工误差及表面粗糙度等原因,传动效率低于滚珠丝杠,一般低于 90%,在润滑良好的情况下可以达到 90%。
图表41:行星滚柱丝杠的指标优势
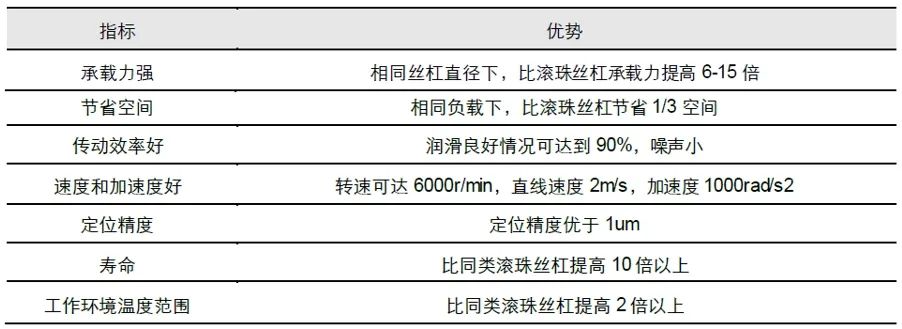
资料来源:精密行星滚柱丝杠的传动特性(李凯等),前瞻产业研究院, 五矿证券研究所
行星滚柱丝杠对加工精度要求高、制造难度大。 丝杠加工工艺有冷轧 、旋风铣、硬车、砂轮磨削等。其中冷轧精度最低,一般不能满足精度要求。砂轮磨削精度最高,但生产效率低。硬车、旋风铣工艺虽然牺牲了一定精度,但相比磨削方式的生产效率显著提升。丝杠在加工过程中, 需多次加工、时效处理、修磨中心孔等以提高精度。行星滚柱丝杠因空间形状复杂加工难度更高。
行星滚柱丝杠此前多进口,价格高昂且定制化。由于行星滚柱丝杠的制造工艺和技术要求相对较高,涉及高低温时效处理、淬火等多个复杂环节,造价成本也相对较高,过去以Rollvis、GSA、Ewellix(均为舍弗勒旗下公司)等公司在国内占据主要市场,国产替代空间广阔。
图表42:全球代表性行星滚柱丝杠企业区域分布
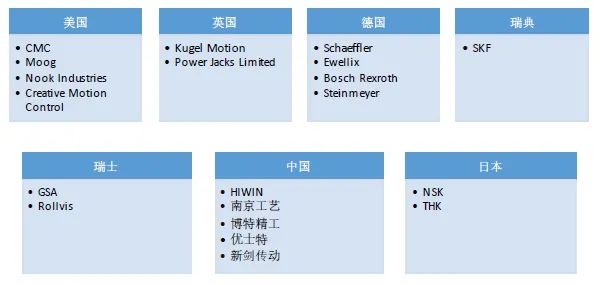
资料来源:前瞻产业研究院, 五矿证券研究所
图表43:中国行星滚柱丝杠市场竞争格局
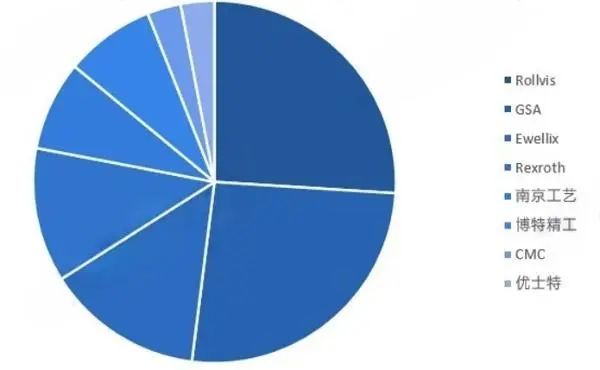
资料来源:前瞻产业研究院,五矿证券研究所
灵巧手使用的微型丝杠要求更高。微型丝杠的螺纹非常细密,能够提供非常平稳的运动和精准的控制。微型丝杠由于尺寸小,工作环境相对精密,对材料的要求特别高。 微型丝杠通常采用高硬度的合金钢或者不锈钢,能够在长期使用中保持高精度和耐磨性。其精密结构导致安装和维护需更高精度对准和细致保养,稍有偏差即影响性能 。国内微型丝杠的生产厂商包括诺仕机器人、因时机器人、新剑传动、KGG等 。
诺仕机器人已研发出全球最微型的行星滚柱丝杠,其丝杠直径仅为2mm,螺母直径6mm。可以极大增加线性执行器空间利用率,为灵巧手等狭小空间精确控制提供线性执行器方案。
因时机器人已经能够实现螺母直径 10mm以内的微型行星滚柱丝杠量产,并将这项技术应用到了灵巧手的驱动设计中既保证了微型伺服电缸更小的体积,同时实现了更大的推拉力。
KGG可以生产轴径 4mm的行星滚柱丝杠,负载可达 1000N;滚珠丝杠轴径仅1.8mmC3/C5/C7精度均可定制。
图表44:灵巧手用的微型行星滚柱丝杠

资料来源:诺仕机器人, 五矿证券研究所
图表45:灵巧手微分行星滚柱丝杠

资料来源:新剑传动,五矿证券研究所
4、腱绳:绳驱方案的短板所在
腱绳是目前绳驱方案的瓶颈之一。灵巧手腱绳需要高强度与耐久性、抗蠕变、较小的折弯半径、抗腐蚀、良好的柔韧性等 。目前腱绳的主流方案包括钢丝绳和超高分子量聚乙烯纤维(UHMWPE)两类。 两种方案各有优劣,最终选择尚无定论。 目前来看,钢丝绳在大负载领域表现出较好的适应性; UHMWPE方案则适用于高自由度、低负载的灵巧手。
钢丝绳常见的材料有碳素钢丝绳、不锈钢丝绳、镀锌钢丝绳、合金钢丝绳等,钢丝绳通常用多股绞合形成线缆,以达到更优的性能。 在手术机器人领域通常采用钨钢丝绳,具有优异的断裂强度和超长的循环寿命。
钢丝绳的优点在于摩擦小,不仅没有内摩擦 ,而且滑动表面的摩擦系数较小。但钢丝绳的缺点也很明显: 1)钢丝绳末端难以固定; 2)钢丝绳不能承受较小的回转半径;3)钢丝绳强度较低,相同直径的情况下所能承受的最大载荷远低于高分子纤维绳;4)钢丝绳寿命较短。
图表46:机器人用钢丝绳
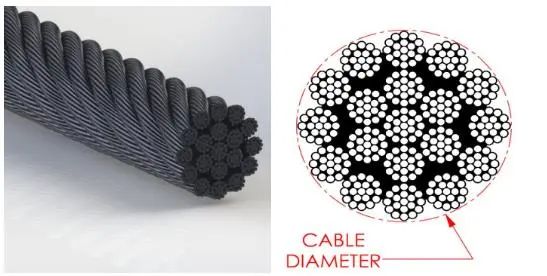
资料来源:江苏贝泽精密, 五矿证券研究所
超高分子量聚乙烯纤维(UHMWPE)是由超高分子量聚乙烯(分子量100万以上)通过凝胶纺丝法制得的纤维。 20世纪30年代Staudinger教授指出高强高模纤维的理想结构应该是大分子链无限长且以伸直链结晶存在。从分子结构看, UHMWPE纤维是接近理论极限强度的最理想的高聚物。
图表47:聚乙烯的分类
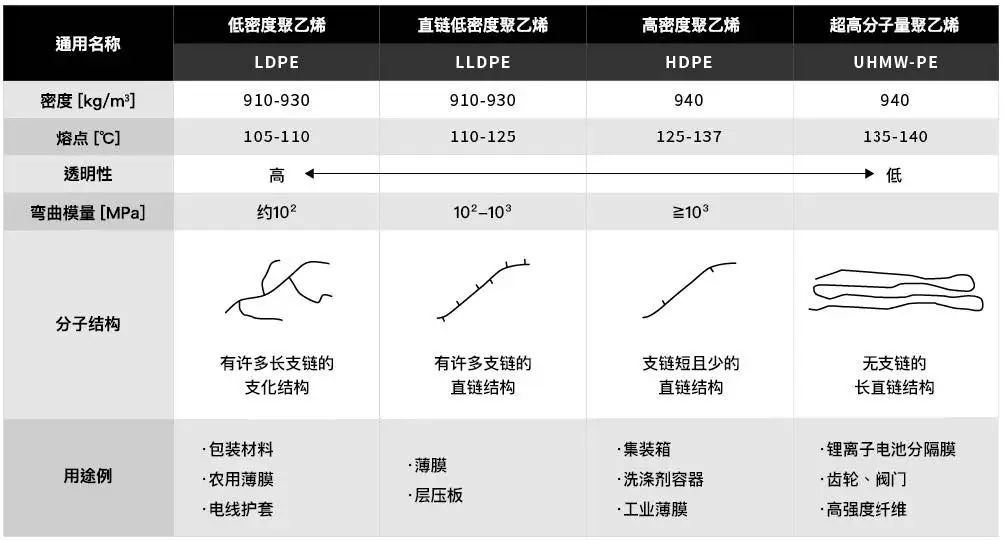
资料来源:mitsui chemicals, 五矿证券研究所
超高分子量聚乙烯纤维(UHMWPE)是人类目前能合成的高强度的物质,与碳纤维、芳纶纤维一起被誉为世界三大特种纤维。UHMWPE具备优异的性能。以 荷兰帝斯曼集团集团的UHMWPE产品 Dyneema为例:
在相同重量的基础上,Dyneema的强度是钢丝的 15倍。
用 Dyneema制成的绳索比钢丝绳轻8倍 ,可以漂浮在水中
Dyneema是疏水性的,不吸水。
Dyneema是化学惰性的,在干燥、潮湿、含盐和潮湿的条件下性质稳定。
Dyneema暴露在紫外线下时仍能保持性能。
UHMWPE具备高强高模特点。纤维的强度可以用自由断裂长度表示。自由断裂长度是指纤维、绳索自由吊挂时,因自身质量而断裂的理论长度。自由断裂长度对应材料的强度,与粗细无关。 UHMWPE的自由断裂长度理论值达到 400km,是芳纶纤维的1.4倍。UHMWPE纤维还具备良好的弯曲性能,能在不开裂或断裂的情况下进行任何形式的织造,而玻璃纤维、碳纤维和芳纶纤维的弯曲性能较差。
图表48:高性能纤维对比

资料来源:《高性纤维》(朱美芳、周哲), 五矿证券研究所
UHMWPE优势在于强度高,但在耐高温、抗蠕变性能上还有所欠缺。由于 UHMWPE分子结构简单、分子间无氢键作用,并且分子间的范德华力只有色散力,导致分子间作用力小,容易滑移造成蠕变。 长时间使用后灵巧手精度会有所下降。
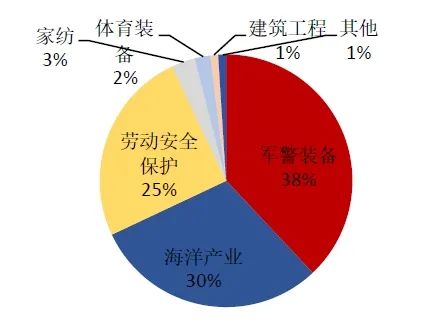
UHMWPE被广泛运用于绳索、网、鱼线、防护装备、加固材料等领域。2023年中国UHMWPE纤维需求量达 3.38万吨,占全球需求的61%以上,2018~2023年 CAGR约14.6%。国内UHMWPE主要应用领域中,军警装备、海洋产业和劳动安全防护三者占比分别为38%、30%和 25%。此外,UHMWPE 纤维在家纺、体育装备和建筑工程等行业也有少量应用。
图表49:UHMWPE纤维的应用领域
资料来源:超高分子量聚乙烯纤维产业现状及未来趋势(闫海燕),五矿证券研究所
图表50:UHMWPE产能(万吨)
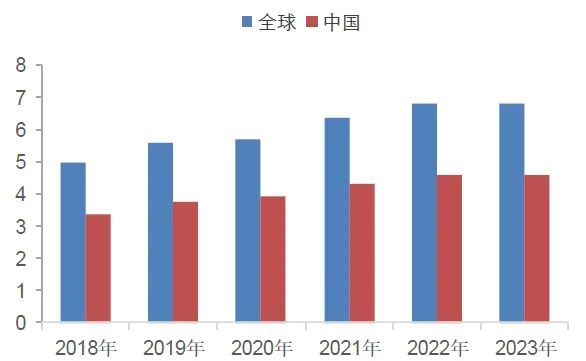
资料来源:超高分子量聚乙烯纤维产业现状及未来趋势(闫海燕), 五矿证券研究所
UHMWPE已经基本实现国产化,性能达到国际领先水平。截至2023年,中国 UHMWPE产能占全球比例超过 60%。目前国内UHMWPE纤维已实现产业化的产品主要集中在强度为35cN/dtex左右的产品,强度大于 40cN/dtex以上的超高强、耐热抗蠕变、高耐切割等功能性纤维产品仍缺乏。海外龙头凭借深厚的技术积淀,仍具有较强的实力。中国企业将在高端领域内继续突破。 南山智尚自主研发的“抗蠕变超高分子量聚乙烯纤维用纺丝液及其制备方法”专利,有效解决了传统UHMWPE纤维长期使用中的松弛问题,显著提升了产品稳定性和耐用性。其纤维拉伸强度达42cN/dtex,处于国内第一梯队,接近国际龙头水平 。
图表51:中国超高分子量聚乙烯十年发展对比
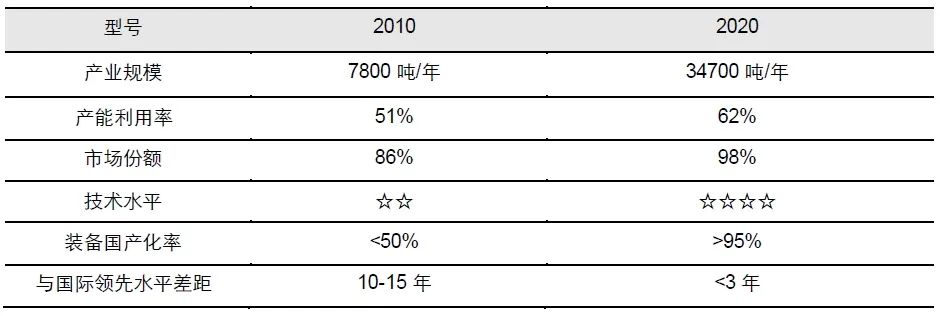
资料来源:我国超高分子量聚乙烯纤维的发展现状与建议(吕佳滨等), 五矿证券研究所
人形机器人灵巧手键绳用量显著。灵巧手键绳用量和自由度、传动方案有关。 如果采用 类似Robonaut2方案, 1个主动自由度只需要1根腱绳。 如果采用 DLR Hand Arm System的方案,每个主动自由度需要2根腱绳来控制 。我们认为, DLR Hand Arm System的方案成本偏高 。对于量产方案,1个主动自由度搭配 1根腱绳的方案更具经济性。以单手17个主动自由度计算, 1个人形机器人需要34根腱绳。 单台机器人的腱绳价值量在2000元-4000元的区间。假设人形机器人年产量100万台/年,其中60%采用绳驱方案,对应市场规模 12~24亿元/年。
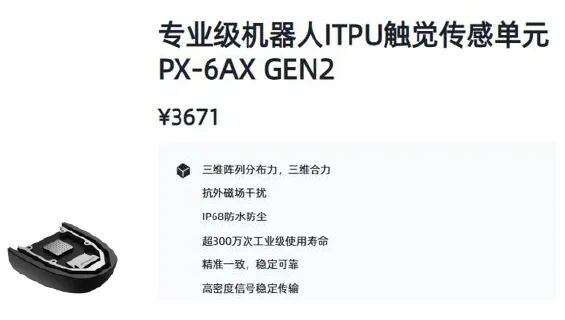
5、触觉传感器:稀缺的价值增量环节
严格来说,灵巧手的传感器包括内部传感器和外部传感器。内部传感器主要是感应灵巧手内部的信号 ,监测灵巧手的工作状态,比如位置传感器、力/力矩传感器、温度传感器。外部传感器主要采集外部的信号,监测和目标物体的交互状态,当前主要为触觉传感器、接近觉传感器。本章节说的传感器主要是触觉传感器 。
人类手部有17000多个感官单元,可以提供力度、纹理、温度、被抓物体的硬度等信息。通过这些外部信息,人手可以建立信息闭环,甚至可以实现“盲操作” 。人手的灵巧操作非常依赖于这一套感知系统,因此丰富的传感器是实现灵巧操作不可或缺的要素。
从广义的方面来说,触觉技术主要包括了接触感知、压力感知、滑感感知、刚度感知、冷热感知。当前阶段,机器人的触觉传感器主要为压力感知和接近觉感知。
图表52:触觉传感器的分类
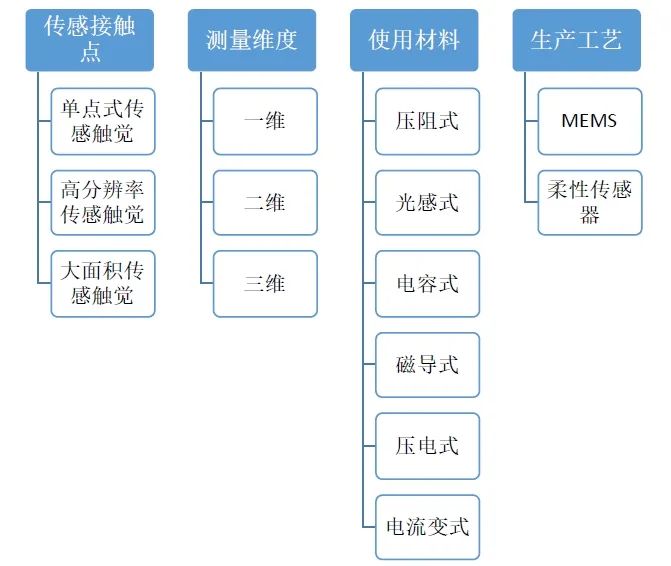
资料来源:机械手触觉技术研究发展综述(王宏民等), 五矿证券研究所
当前主流传感器以MEMS工艺为主。MEMS Micro-Electro-Mechanical System)是一种微型而精密的机械系统,它将微型机构、微型传感器、微型执行器以及信号处理和控制电路等集成于一块或多块芯片上。 MEMS传感器具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点 。
MEMS传感器包括压阻式、电容式、压电式、光电式(视触觉)等。 当前压阻式传感器为行业主流其优点包括灵敏度高、分辨率高、技术成熟、成本较低。视触觉传感器(Vision-Based Tactile Sensor,VBTS)也逐步受到关注 。
图表53:帕西尼的mems传感器
资料来源:帕西尼,五矿证券研究所
图表54:某压阻式传感器制作工艺流程图
资料来源:基于阵列式压力传感器的触觉感知方法研究(李颖鸿), 五矿证券研究所
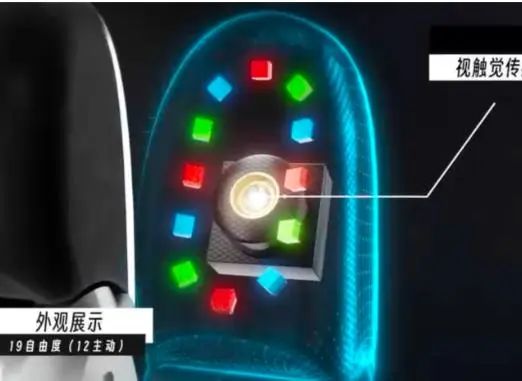
视触觉传感器原理主要是利用相机接收表面的形变信息来实现对外界环境的感知 ,能够实时反馈与接触物体的压力、形状、纹理等信息。视触觉传感器的代表是GelSight与 Meta AI推出的Digit 360。Digit 360 是一款指尖形状的全向视触觉传感器,配备了超过18 种传感功能,是真正的多模态触觉传感器(可以检测空间细节的微小变化,感应力小至1mN,几何形状低至 7μμm,振动高达 9Khz,热量,甚至气味)。
图表55:智元机器人的视触觉传感器
资料来源:智元机器人, 五矿证券研究所
图表56:digit 360视触觉传感器
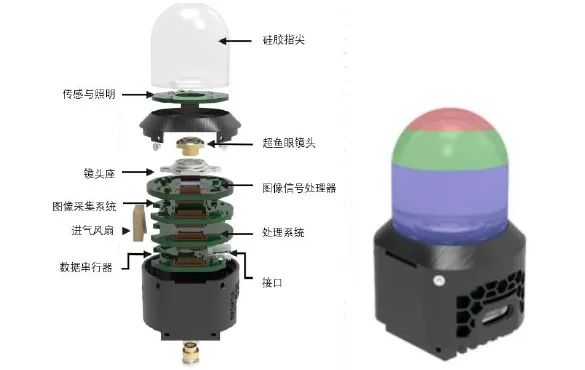
资料来源:欣百特科技, 五矿证券研究所
除MEMS传感器外, 柔性触觉传感器是近年兴起的另一方向。柔性触觉传感器又称电子皮肤,是 利用柔性材料的物理特性,将外部的力学量转换为电信息,从而实现对触觉感知的传感器产品。柔性电子皮肤 以聚二甲基硅氧烷PDMS、聚乙烯醇PVA等柔性材料为基底,以碳纳米管、石墨烯、导电聚合物等为敏感材料,采用微纳加工技术制备而成 ,能贴合人体皮肤或机器人复杂曲面。而传统 MEMS传感器采用半导体工艺生产和封装,是刚性结构。
与MEMS传感器类似, 柔性触觉传感器可以分为压阻式、电容式、压电式、摩擦电式等。其中电阻式和电容式技术成熟、成本低,成为当前主流方案。
图表57:不同原理柔性触觉传感器对比
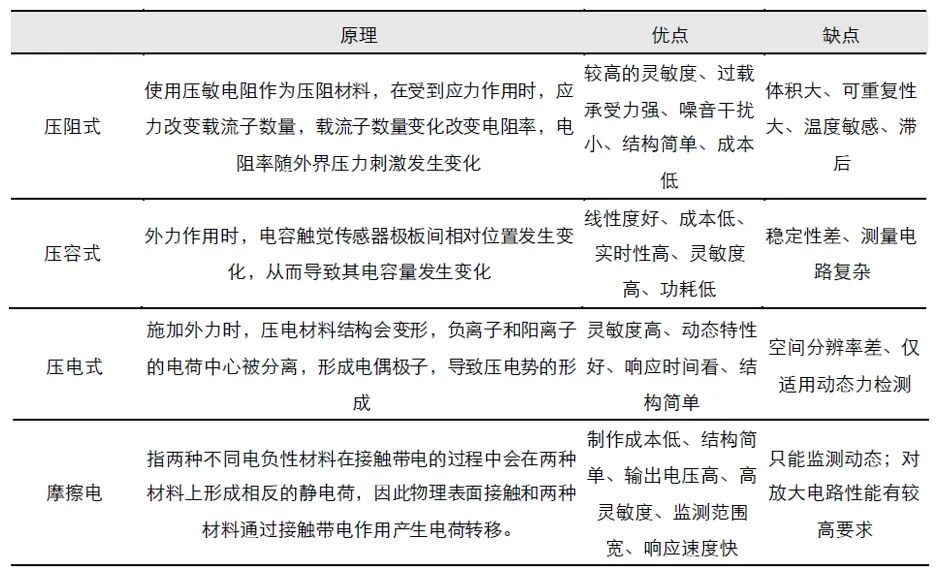
资料来源:柔性触觉传感器智能感知技术与应用研究进展(尹宝凡等), 五矿证券研究所
图表58:四种典型柔性触觉传感器示意图
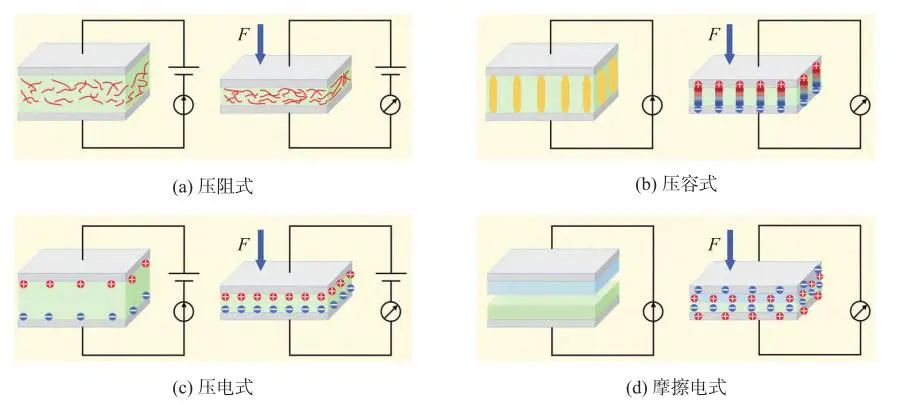
资料来源:柔性触觉传感器智能感知技术与应用研究进展(尹宝凡等), 五矿证券研究所
我们看好触觉传感器/电子皮肤方向的机会。
首先,触觉是实现灵巧操作不可或缺的要素,触觉传感器重要性凸显。
其次,当前触觉传感器主要在指尖,未来有望覆盖手掌、整手,使用量将大幅提升。预计未来电子皮肤单机价值量有望达到3000~4000元/台。按人形机器人出货量100万台/年估算,对应市场规模30~40亿元 /年。
再次,触觉传感器 /电子皮肤技术壁垒高,厂商跨界切入难度较大。当前灵巧手行业主要厂商包括他山科技、帕西尼、能斯达 、墨现科技等。各厂商具备自己的技术特点,在细分领域形成优势,进行差异化竞争。比如他山科技采用多对的电容传感器,再加以力的识别结构,可以很好地做三维力的学习,2024年出货触觉传感器1万颗以上 。帕西尼 PX-6AX gen2 触觉传感器,采用电磁式技术路线,可捕捉15种多维触觉感知信息,可以测量法相及切向力,空间分辨率1mm,精度 1%FS,实现 0.01N的精密识别。墨现科技的柔性传感器结构简单,厚度最小可以做到0.2mm,一个指尖可以覆盖100个感应点甚至更多。
图表59:部分触觉传感器企业
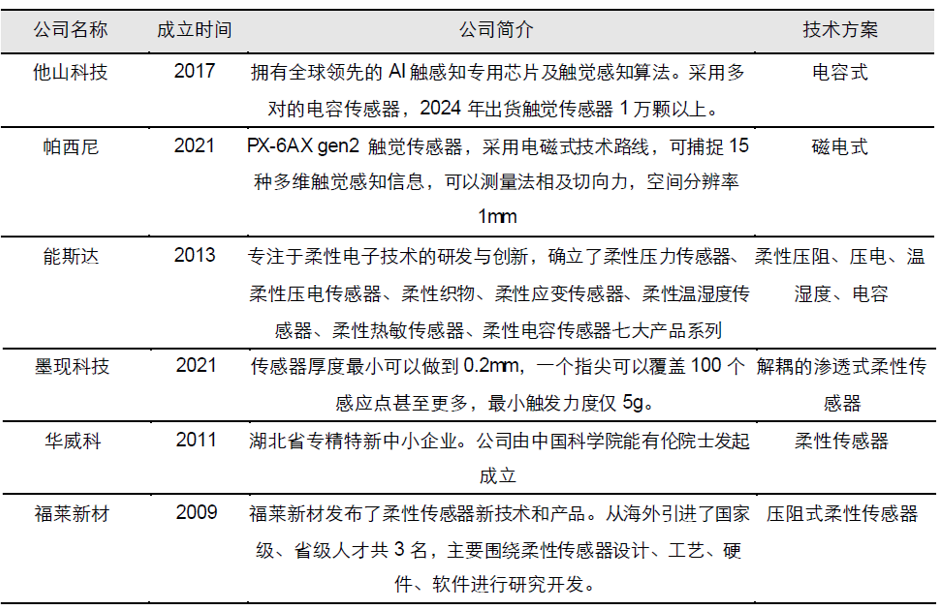
资料来源:他山科技、帕西尼、能斯达、新华社、墨现科技、华威科、福莱新材, 五矿证券研究所
图表60:华威科的电子皮肤
资料来源:中国光谷公众号,五矿证券研究所
图表61:墨现科技的灵巧手指尖传感器
资料来源:墨现科技, 五矿证券研究所
图表62:福莱新材的柔性传感器

资料来源:福莱新材,上海证券报, 五矿证券研究所
图表63:他山科技触觉传感器芯片

资料来源:他山科技, 五矿证券研究所
电子皮肤目前正处于从实验室走向产业化的初期阶段。从性能角度,电子皮肤的灵敏度、分辨率等性能已有较大提升,但大面积阵列化部署时,面临着高成本、拼接问题、电路连通性差等难题 。
投资建议
1、灵巧手是人形机器人区别于工业机器人的核心价值所在,重要性凸显。同时高度灵活拟人的灵巧手也是产业链当前瓶颈。优质灵巧手公司具备高壁垒和稀缺性,可以给予适当的估值溢价。
2、建议关注:1)深耕精密传动系统,具备灵巧手整体设计能力和一体化供应能力的兆威机电;2)具备热处理、精密机加工能力,布局行星滚柱丝杠和微型丝杠的五洲新春;3)电机控制芯片环节的峰岹科技

 VIP复盘网
VIP复盘网
