

在全球科技革命与产业变革浪潮中,人形机器人正从科幻走向现实,成为继智能手机、新能源汽车后重塑全球产业格局与推动生产力跃迁的关键赛道。它融合人工智能、机械工程等多领域尖端技术,既肩负替代人类完成高危、重复、高强度劳动的使命,也是破解全球人口老龄化下劳动力短缺、推动制造业“柔性智能”升级、重构家庭与公共服务场景的重要突破口。当前,该行业进入“0到1”向“1到100”规模化迈进的关键期:政策端中国有顶层设计与地方协同推进;技术端大模型赋予其“通用智能”,关键技术迭代且国产专利、整机企业数量居全球前列;需求端多场景对高效劳动力需求迫切;资本端2024年国内机器人行业投融资超200亿元,部分城市形成产业集群。不过,行业仍需突破核心零部件国产替代未完成、量产成本高、复杂场景泛化能力不足等挑战。
本报告将从行业概述入手,梳理人形机器人技术构成与核心特征,分析政策、技术、需求、资本四大驱动因素,拆解产业链上下游及中游本体制造的竞争格局,重点剖析重点企业的技术路径与量产规划,结合市场规模预测与发展趋势,提供行业现状与未来的全景视角,助力把握万亿级赛道机遇。
01
行业概述
1、人形机器人概念
定义:人形机器人,又称仿人机器人或类人机器人,是指具有仿人的形态和功能的机器人,具备一定的感知、学习和认知能力。
特征:1)高度仿人的外形结构:拥有与人类相似的躯干、四肢和头部。腰部灵活,可轻松实现转身、弯腰等动作。手臂的肩部、肘部和腕部关节活动范围大,能完成复杂的伸展、抓取和操作任务;腿部的膝关节和踝关节使机器人能够稳健行走,步伐节奏与人类相近。手部通常具有多个灵活的手指,可实现精细的抓握动作。2)强大的环境感知能力:配备多种先进的传感器,包括视觉、听觉、触觉等,能够全面感知周围环境信息。3)智能决策与学习能力:借助计算机科学和人工智能技术,它们能够对感知到的大量环境信息进行快速分析和处理。当面对复杂的任务时,人形机器人会根据预设的算法和模型,结合实时的环境信息,制定出最优的行动方案。它们还能通过机器学习算法,从过往的经验中吸取教训,不断优化自己的行为。
应用场景:当前人形机器人主要应用于医疗护理、家庭服务、教育娱乐、工业生产和公共服务等领域中,替代人类完成危险或重复性高的工作,进一步释放劳动力,提高社会生产力。

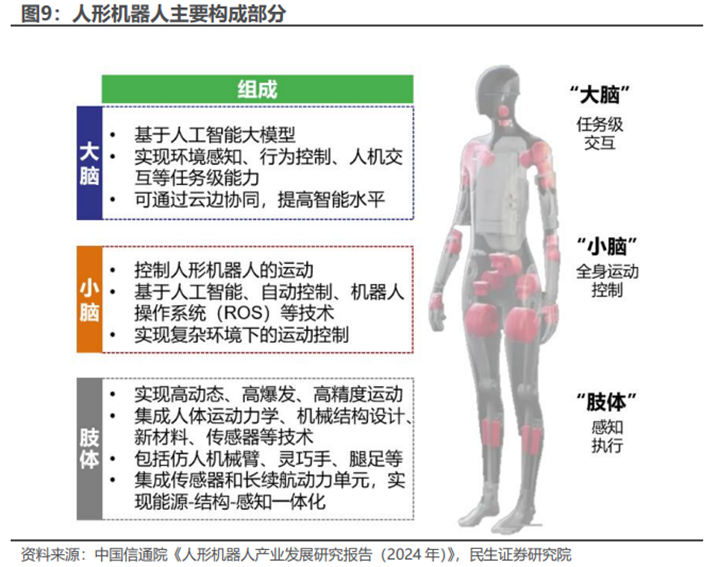
2、人形机器人主要构成部分
人形机器人主要构成部分包含由“大脑”、“小脑”和“本体”。其中,“大脑”负责实现环境感知、行为控制、人机交互等任务级能力,目前主要是基于人工智能大模型技术,同时也可通过云边协同,提高机器人的智能水平。“小脑”负责控制人形机器人的运动,目前主要基于人工智能、自动控制、机器人操作系统等技术,实现复杂环境下的运动控制。“本体”负责实现高动态、高爆发、高精度运动,集成了人体运动力学、机械结构设计、新材料、传感器等诸多技术,包括仿人机械臂、灵巧手、腿足等关键结构,并通过集成传感器和长续航动力单元,实现能源-结构感知一体化。
大模型驱动人形机器人智能化跃迁,AGI为终极目标。大模型已成为人形机器人“大脑”的核心技术底座,推动其从预设路径的机械执行向通用智能跃升。传统机器人依赖决策树或状态机模型,适应能力受限,而大模型通过四大能力突破实现智能化升级:1)任务交互:基于语言/视觉的多模态入口,支持自然指令理解与响应;2)环境感知:融合多模态信息,提升复杂场景泛化能力;3)任务规划:依托大模型推理与知识迁移能力,自主拆解复杂任务;4)决策控制:整合环境与运动信息,优化动作策略。技术路径上,非具身大模型聚焦任务分解与规划,而具身大模型直接输出高频运动指令,终极形态指向AGI(通用人工智能)——通过单模型闭环实现主动理解与无限适应。
3、人形机器人产业面临的挑战
(1)技术挑战:1)数据采集与标注复杂且成本高昂:特别是人类动作数据的收集,需要高精度的传感器和专业的标注团队来确保数据准确性。2)多模态信息融合鲁棒性与实时性不足:将视觉、听觉、触觉等多种信息有效融合以形成统一的环境认知,在鲁棒性和实时性方面仍有不足,尤其在复杂多变环境中,机器人难以准确理解和应对变化。3)自主学习与适应性不足:现有机器人虽能进行一定程度的自主学习,但在处理未知或复杂任务时,适应性和泛化能力不足。需要更有效的学习算法以从少量样本中快速学习并适应新环境。4)学习过程中的安全问题:需要确保机器人在学习过程中不会产生偏差或做出有害行为。5)能源效率与续航能力:尽管电动驱动系统有所改进,但如何进一步降低能耗、延长工作时间仍是亟待解决的问题。
(2)市场挑战:成本高昂、应用场景不明确、相关的法规政策有待完善、社会接受度有待提高。
02
驱动因素
供需两端共振,国内人形机器人产业落地条件已成熟。
1、政策端:国内政策提供指引,自上而下统筹机器人产业发展
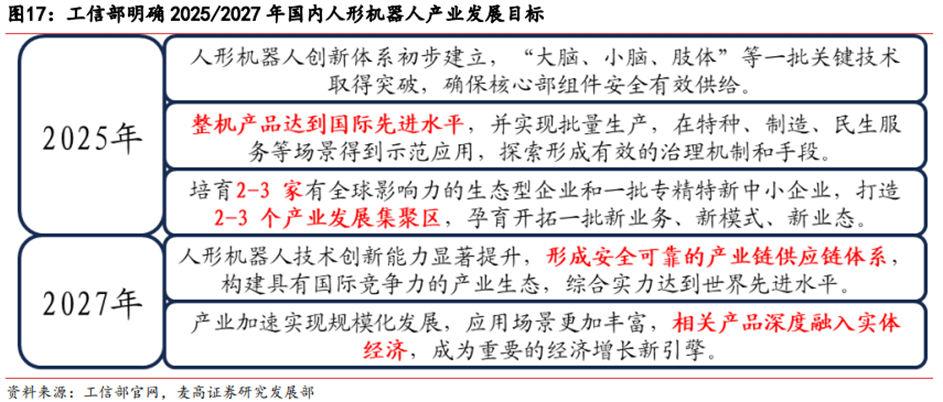
2023年11月工信部印发指导性文件《人形机器人创新发展指导意见》推动人形机器人技术创新和产业发展,明确了2025/2027年国内人形机器人产业发展目标,明确了关键突破技术与重点培育产品,通过顶层设计推动人形机器人核心技术突破与产业链升级。

各地加速响应并密集推出配套支持政策,形成“中央引领 地方协同”的产业推进格局。北京、上海、广东等省市落地建设人形机器人创新中心,支持人形机器人产业发展;苏州、重庆等城市鼓励支持产业基金建设,加快构建人形机器人产业集群发展。
2、技术端:中国内地累计人形机器人技术专利全球第一
从企业数量看,中国内地人形机器人整机初创企业领先全球。根据国家地方共建人形机器人创新中心透露,截至2024年,全球通用人形机器人整机商业公司约150家,其中中国内地超过80家,占比超过50%,中国内地人形机器人整机商业公司中有半数来自高校的学生和教师创业。
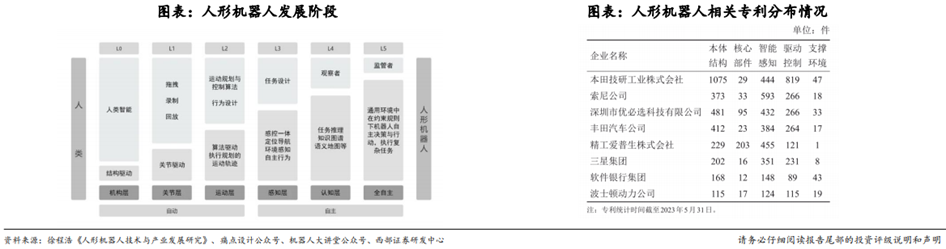
从专利数看,根据人民网研究院数据,截至2023年,中国已累计申请6618件人形机器人技术专利,成为申请人形机器人技术专利数量最多的国家。在人形机器人领域,以有效发明专利计算,中国共拥有有效发明专利1699件,仅次于日本的1743件,排名全球第二。从申请人所持有的有效技术专利数量来看,优必选科技已经在人形机器人的有效专利储备量方面排名全球第一,高于本田、索尼、丰田等企业。
在2025年的国际消费电子展(CES),芯片巨头英伟达发布了多个新产品,其中包括首个生成式世界基础模型Cosmos。英伟达表示已经有许多领先的机器人和汽车公司成为Cosmos的首批用户。
3、需求端:人形机器人替代劳动力与多场景应用蓬勃兴起
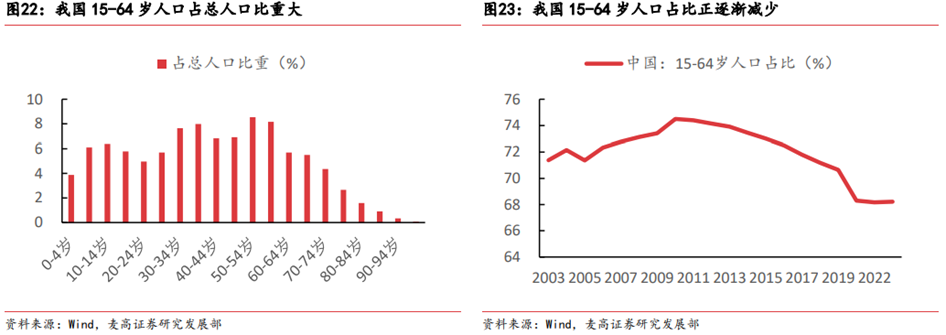
根据国家统计局数据,2024年中国65岁及以上人口达到2.2亿人,占总人口比重的15.6%,该比重连续29年上升。当前我国15-64岁人口占比为68.22%,仍然占比较大,但是该比例已连续多年下滑。劳动力供给减少将直接推高用工成本,倒逼国内产业向自动化、智能化转型,人形机器人产业蓬勃兴起顺应时代发展需求。
人形机器人落地应用场景持续扩散。在工业制造领域,人形机器人能够深度融入自动化生产线,承担复杂装配、物料搬运等精准作业,持续深化应用;在商业服务范畴,凭借其灵活交互特性,加速落地商超导购、酒店服务、餐饮配送等场景;在家庭生活维度,逐步探索陪伴老人、照护儿童、家居清洁等多样化服务功能。政策助力、资金注入和技术迭代全方位推动人形机器人大规模商业化应用与持续创新发展注入澎湃动力,加速人形机器人融入千行百业的进程。

人形机器人替代人成本优势明显。人形机器人在工厂中,可以高强度、长时间、不间断稳定的劳动。在家庭中机器人能够提供全天候服务,且无需考虑人工疲劳或情绪问题,适合需要稳定服务的家庭环境。人形机器人在工厂仓储和家庭服务两种场景中的使用成本均显著低于人工费用,且能够提供更高的效率和稳定性,展现了极高的性价比,是替代人工的理想选择。

4、资本端:人形机器人项目持续受到青睐
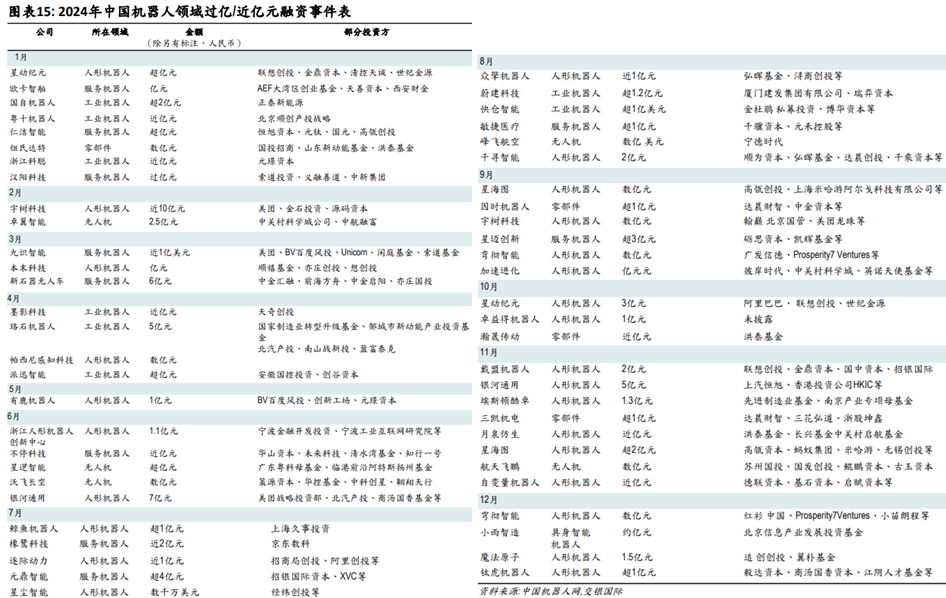
从中国内地人形机器人产业链企业的分布看,据高工机器人产业研究《人形机器人产业地图(2024)》显示,深圳、北京、上海、杭州、苏州分别拥有22.4%、14.5%、11.8%、5.8%和5.5%的产业链企业。同时从一级融资情况来看,据中国机器人网不完全统计,2024年,中国内地机器人行业共发生200起左右投融资事件,金额总计超200亿元。其中,近亿元与过亿元级事件约55起,金额超175亿元,融资总额超70亿元反映人形机器人项目持续受到资本青睐。
03
行业现状及趋势
1、人形机器人处于0到1跨越期
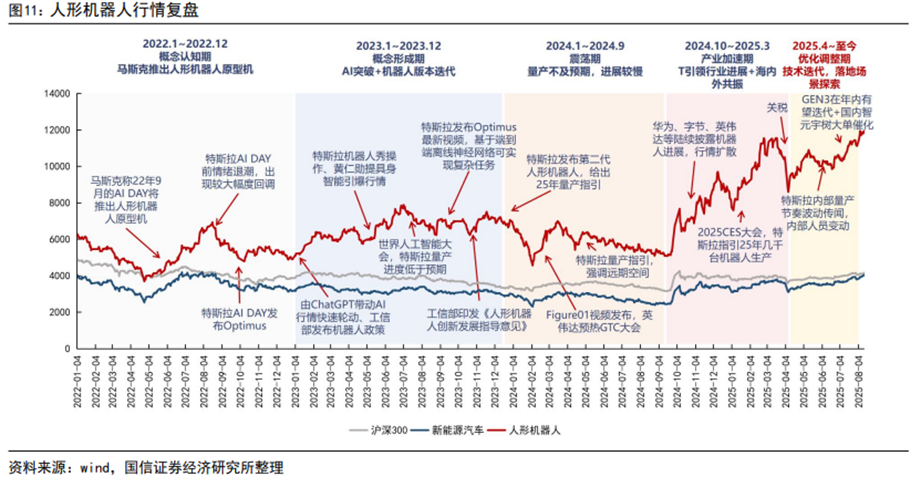
自特斯拉展示Optimus样机以来,大模型迭代 国内外共振 政策支持带来机器人行情的持续,机器人产业化进展持续推进,当前人形机器人板块呈现几大趋势强化:1)巨头入局:特斯拉(Optimus)、英伟达(GR00T)、华为(具身智能中心)、字节(豆包机器人)等科技龙头加速布局,2025年或形成技术共振;2)新秀涌入:初创企业(Figure、1X)与车企(小米、小鹏、赛力斯等)双向发力,产品迭代提速;3)国产崛起:宇树(H1双足机器人)、智元(远征A2)等技术突破带动国产认知度提升,2025年或迎量产关键节点。下面对板块行情复盘:
阶段一(22.1-22.12)概念认知期:继特斯拉提出人形机器人设计概念后带动板块,市场开始寻找机器人相关布局,处于概念萌发阶段。
阶段二(23.1-23.12)板块形成期:机器人受益于AI大模型能力的提升,同时特斯拉持续迭代新版本(新视频),机器人概念逐步确立并加强。
阶段三(24.1-24.9)震荡期:特斯拉量产节奏缓慢影响行情景气度,2024年1月特斯拉给出2025年实现量产的指引,低于市场预期,整体行情承压。
阶段四(24.10-25.3)产业加速期:特斯拉量产节奏明确,AI模型能力持续赋能,政府逐步加大支持,海内外机器人公司共振,机器人产业加速进展。当前特斯拉、宇树、智元机器人等厂商逐步小批量生产,量产节奏逐步加速。
阶段五(25.4-至今)优化调整期:技术迭代调整中,持续探索人形机器人落地场景。5月关税、6月特斯拉内部人员变动影响板块情绪。据马斯克,OptimusGEN-3在年内有望迭代,叠加智元宇树拿下大订单催化板块情绪修复。
参考同为颠覆性产品的智能手机、新能源汽车的发展历程,作为移动互联网重要载体,智能手机经历2011年23%渗透率的萌芽期,到2014年渗透率攀升至86%的成长期,目前进入渗透率超90%的成熟期;而新能源汽车2020年前渗透率低于5%,2024年预计渗透率35%,逐步从成长期迈入成熟期、格局收敛期;对于人形机器人板块,能够认为正处于“0→1(认知形成 产品迭代)阶段”向“1→100阶段(批量化 降本 性能迭代)”迈进,产业有望迎来爆发。
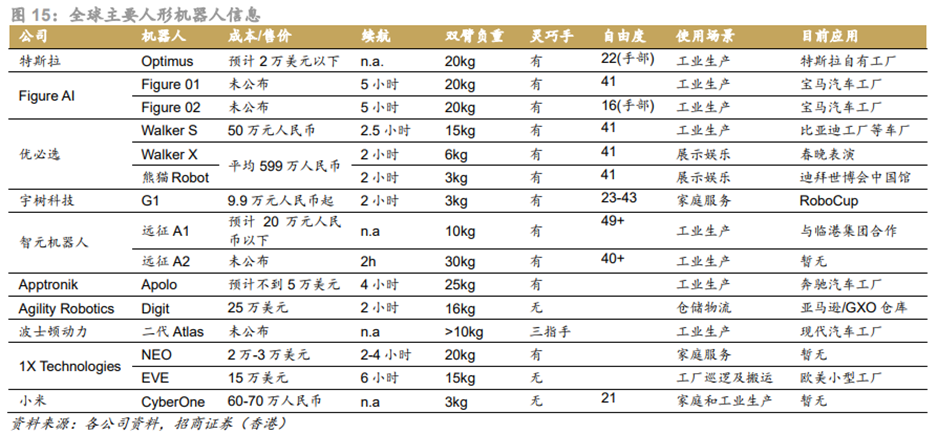
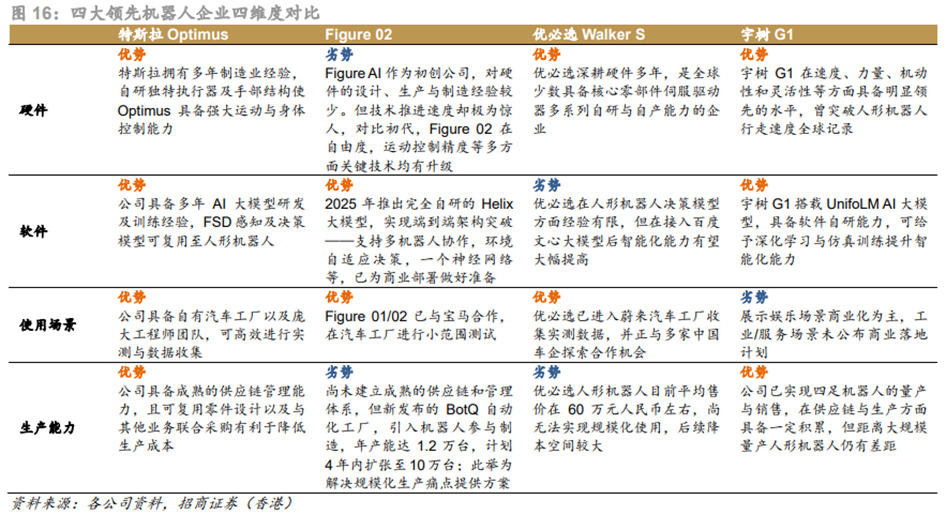
2、特斯拉Optimus、Figure 02、优必选Walker S以及宇树G1综合技术进度领先
美国两大机器人企业中:特斯拉拥有强大的软硬件自研能力以及技术基础,同时具备成熟的供应链管理体系,且拥有自有工厂便于实测,在四大维度均有明显优势。Figure 02在Helix大模型的加持下软件技术领先,且已与宝马合作进入汽车工厂测试,但在规模化生产以及成本管控方面作为初创公司仍有所欠缺。
中国机器人企业中:优必选具备机器人核心零部件的自研自产能力,且在接入百度文心大模型后智能化能力有所补足,但成本仍有较大优化空间。而宇树G1在运动能力方面展现出全球领先的技术水平,且具备AI大模型自研能力,软硬件均具备优势。同时,宇树已实现四足机器人的量产与销售,具备一定供应链经验积累,优于FigureAI等初创公司。但目前宇树G1公布的具体商业化落地场景仅有机器人足球赛事。
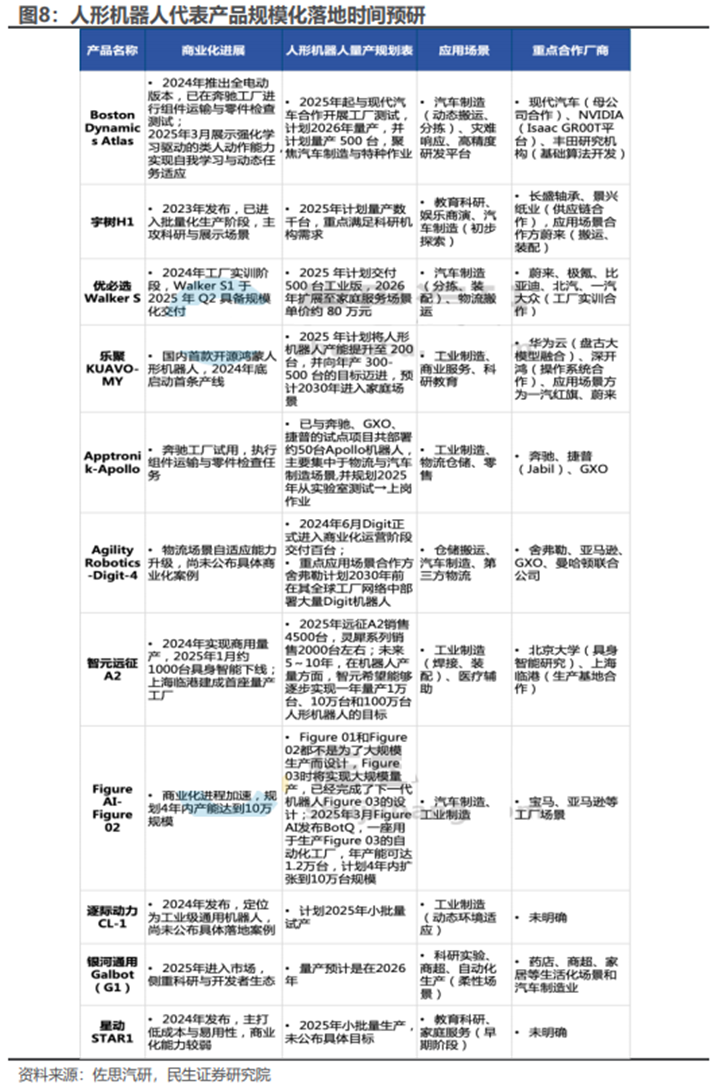
3、众多代表性厂商均提出量产规划,2025年有望步入行业量产元年
海外方面,代表性厂商特斯拉人形机器人Optimus 2025年预计进入量产准备阶段,特斯拉发布2025年第一季度财报披露,人形机器人Optimus已在弗里蒙特工厂搭建试生产线,计划2025年试生产5000台,主要用于内部物流与制造环节。2026年产能目标提升至5万台,并逐步拓展至家庭服务与特殊环境作业。国内方面,优必选2025年规划人形机器人产能达到1000台,2027年有望实现万台级别的交付。除优必选外,智元、魔法原子等厂商也相继公布量产计划。全球人形机器人产业正经历从实验室到工厂的关键跃迁。
04
产业链分析
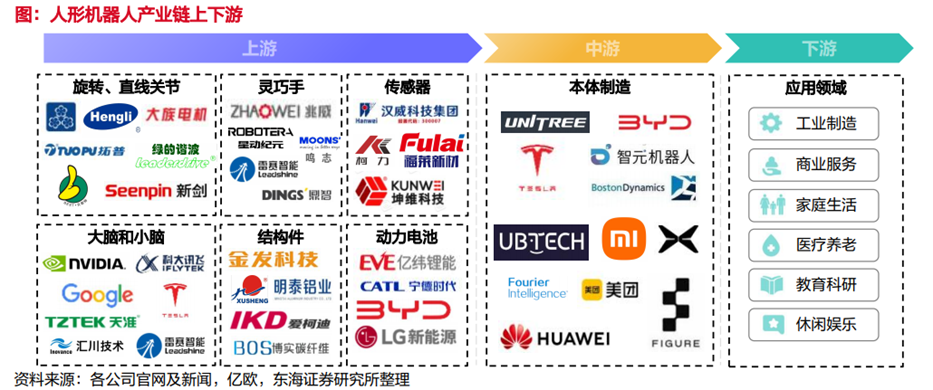
人形机器人在AI的赋能 重磅玩家入局下,有望实现革命性突破。上游主要是零部件和原材料供应商。中游是人形机器人本体厂商。下游则是人形机器人的终端应用市场,包括医疗、教育、救灾救援、公共安全、生产制造、家庭陪护等多个领域。
人形机器人作为高度复杂的智能装备,上游核心机械零部件对其性能与功能的实现起着至关重要的作用。例如关节模组、减速器、灵巧手、传感器等零部件,它们直接决定了人形机器人的运动精度、负载能力、灵活性以及整体的可靠性。任何一个关键部件的性能不足都可能影响到人形机器人的整体表现。在全球人形机器人产业快速发展的当下,相关核心机械零部件的市场需求预计将迎来显著增长。
国产人形机器人核心零部件正展现出显著的极具竞争力的成本优势。经过多年的技术沉淀与产业深耕,我国在关键零部件的研发制造上取得了长足进步,从高精度的减速器到高效能的电机,再到智能灵敏的传感器,均实现了不同程度的自主化生产。主要核心部件与国外相比有60%-70%的成本优势。一方面,国内庞大的制造业基础和完善的产业链,使得零部件生产能够以规模化作业降低单位成本;另一方面,对技术研发的持续投入和创新工艺的应用,减少了不必要的损耗和浪费。这种成本优势为国产人形机器人在国内外市场大规模推广提供了支撑。

1、减速器:谐波、行星为主,探索新型减速器
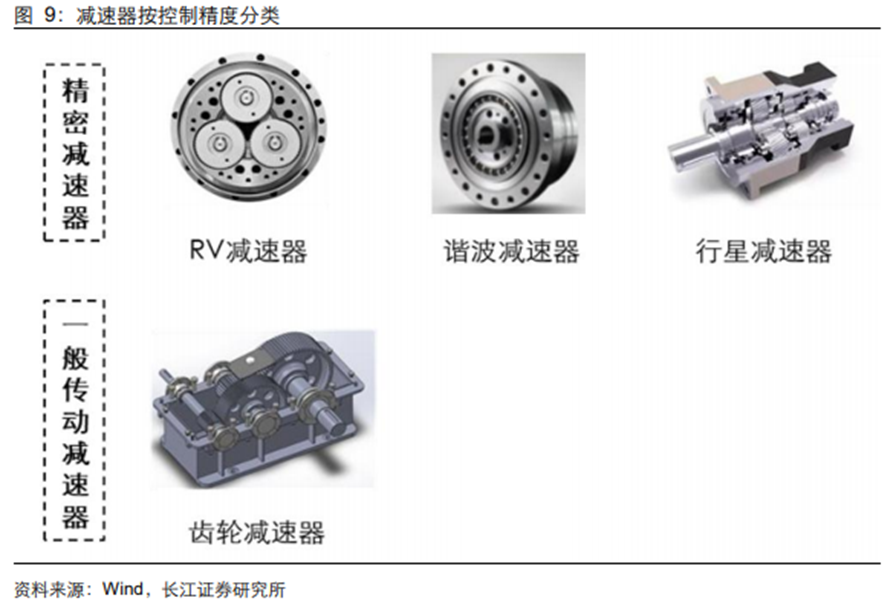
减速器类似于机器人的“肌腱”,对于每一个以轴为中心转动的机器“关节”,减速器可以精准调节机器转动角度。按照控制精度划分,减速器可分为一般传动减速器和精密减速器。精密减速器回程间隙小、精度较高、使用寿命长,更加可靠稳定,应用于机器人和数控机床等高端领域。其中谐波减速器与RV减速器已成为高精密传动领域广泛使用的精密减速器。
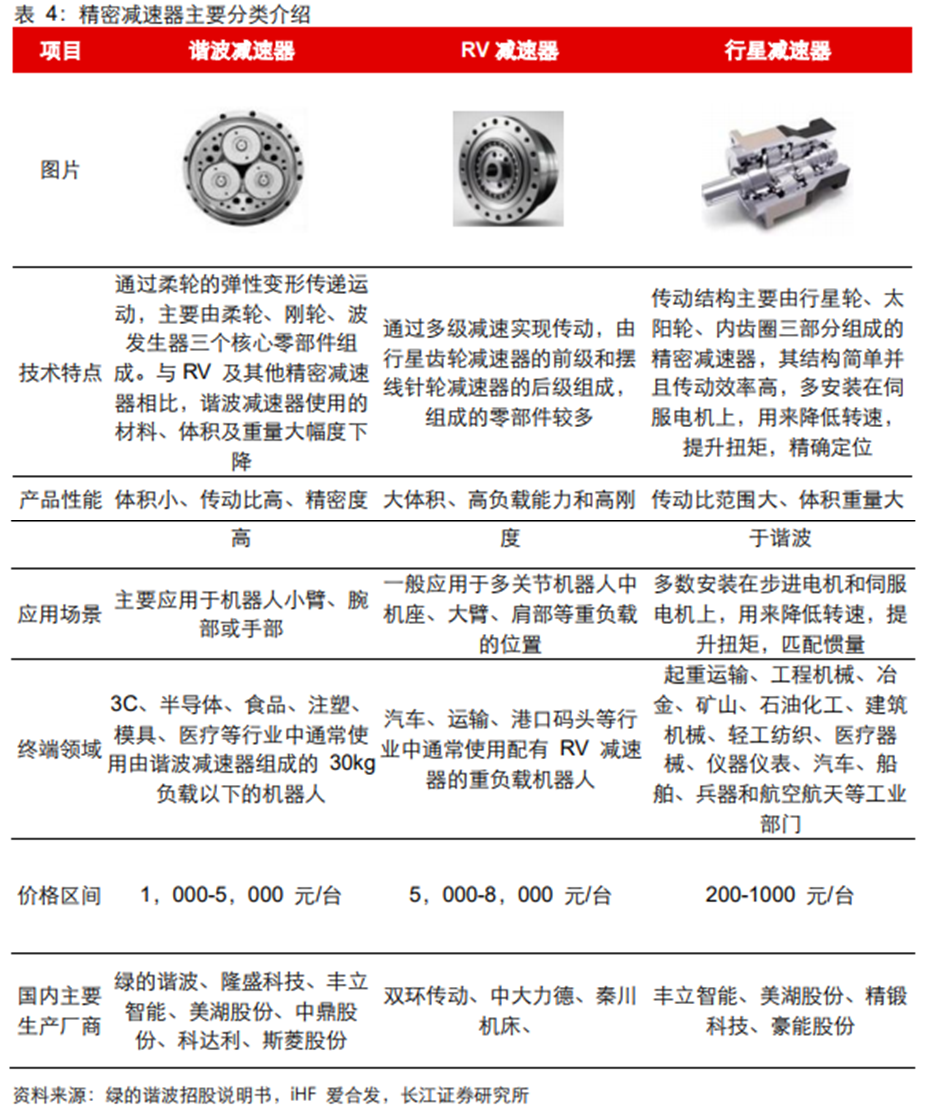
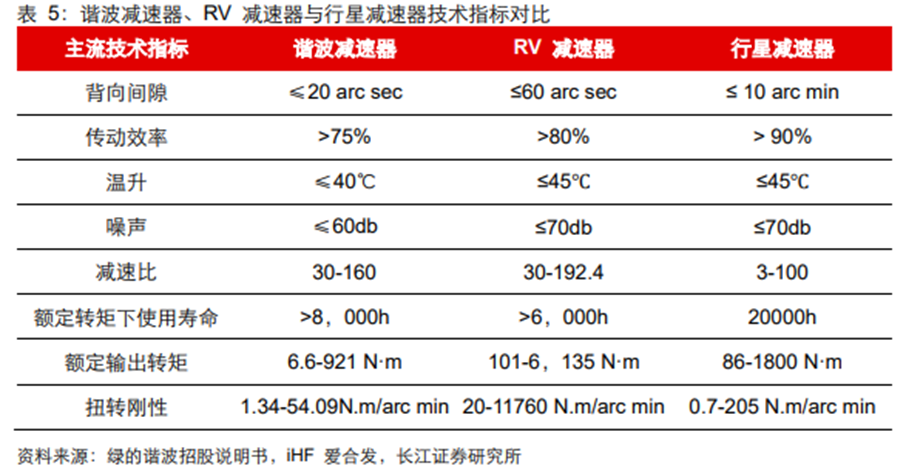
由于传动原理和结构等技术特点差异,使得各种减速器在下游产品及应用领域方面各有所侧重、相辅相成,应用于不同场景和终端行业。谐波减速器具有单级传动比大、体积小、质量小、运动精度高并能在密闭空间和介质辐射的工况下正常工作的优点,同时具备成本优势,使其在人形机器人小臂、腕部、手部等部件领域具有无可替代的地位。RV减速器主要应用于工业机器人的高负载关节;行星减速器,传动比范围大、体积重量大于谐波减速器,主要安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量,应用于起重运输、工程机械等工业设施。
摆线针轮减速机虽然利用行星齿轮传动原理,但其采用了摆线针齿啮合方式,是一种新型行星减速器。其与传统行星齿轮减速器在以下几个方面有所不同:1)结构和工作原理方面,传统行星齿轮减速机由中心太阳齿轮、行星齿轮和内环齿轮组成。太阳齿轮位于中心,围绕其旋转的行星齿轮与内环齿轮相互啮合,实现减速效果。摆线针轮减速机利用摆线针轮与摆线针齿轮的啮合来实现减速。2)工作效率方面,行星齿轮减速机由于多组齿轮的传递,减速效率通常在85%至95%之间。摆线针轮减速机的效率较高,通常能够达到90%以上。其摆线齿轮轮廓设计使得啮合时减少了齿轮间的滑动,减小了能量损失。3)扭矩对比方面,行星齿轮减速机可以承受较大的径向和轴向载荷,适用于需要高扭矩传递的应用。摆线针轮减速机由于齿轮的设计特点,更适合用于较小的扭矩传递,适用于精密传动场景。4)应用领域方面,行星齿轮减速机适用于需要高扭矩传递的工业应用,如生产线、机床等。而摆线针轮减速机更适用于需要高精度传动的领域,如精密机械、自动化装置等。
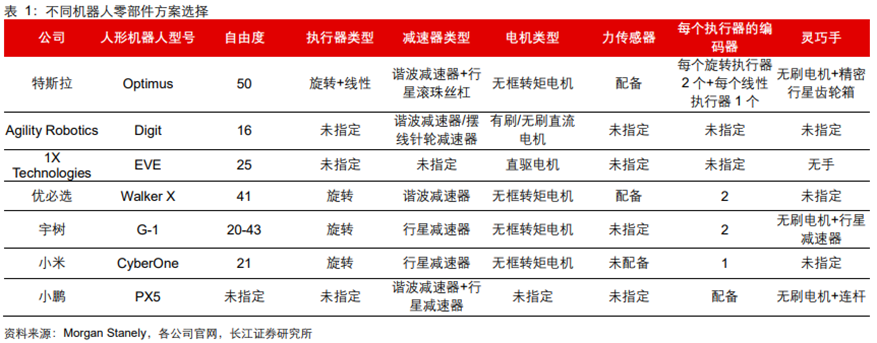
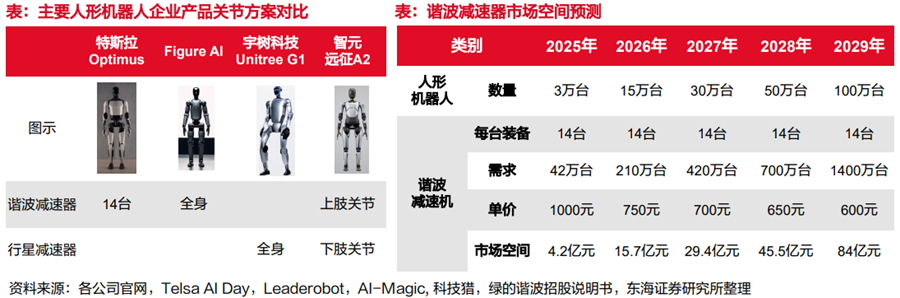
国内外人形机器人多点开花,谐波减速器市场需求大增。国内外人形机器人产品正呈多点开花态势,从主要厂家的旋转关节减速器方案来看,谐波减速器、行星减速器为主流方案。谐波减速器则主要应用于其肩、肘、腕等关节,精密行星减速器主要应用于人形机器人的手、膝、踝关节等部位。
谐波减速器全球市场需求激增。根据特斯拉和其他公司量产规划,预计2026-2029年全球产量达15万台、30万台、50万台、100万台。如果平均每台装14台,2029年人形机器人谐波减速器需求将达1400万台,全球市场增量将达84亿元。
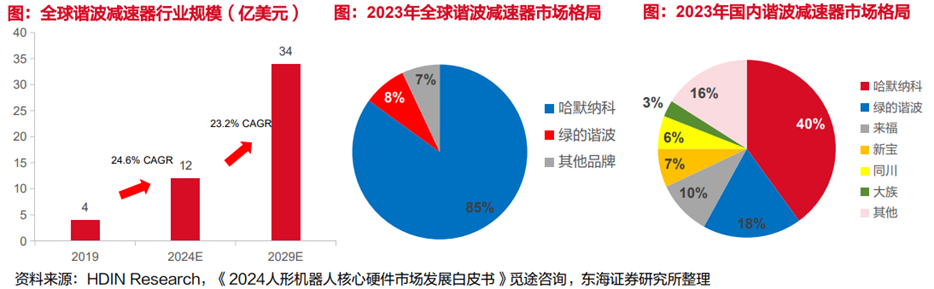
全球谐波减速器市场规模快速增长。根据HDIN Research数据,2024年的谐波减速器市场规模达12亿美元,约人民币86亿元。同时,预测表明受益下游人形机器人需求爆发,谐波减速器市场将继续保持上升趋势预计到2029年将达到34亿美元。
哈默纳科占全球市场大部分份额,国内企业正在崛起。2023年哈默纳科占据全球市场约85%的份额,具有行业领头地位。另外,绿的谐波占据全球8%市场份额。虽然全球市场海外龙头主导地位仍将持续,但国内企业逐渐展现强劲的竞争力和进口替代趋势。从国内市场来看,哈默纳科2023年占有率40%,相比全球份额较小。绿的谐波占有率已达18%,占有率正持续扩大。
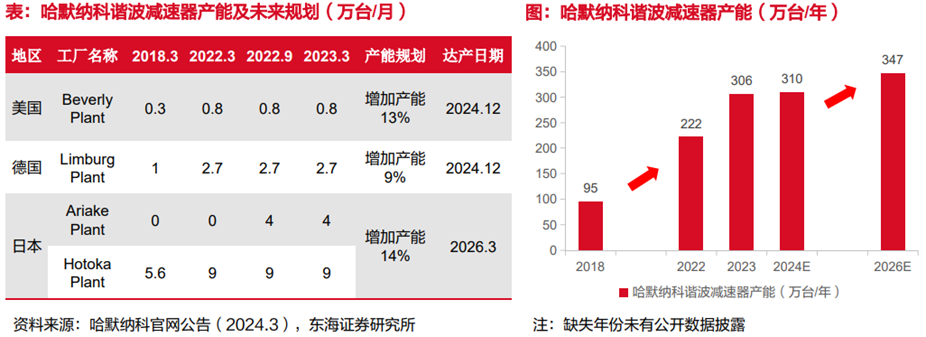
哈默纳科谐波减速器扩产幅度较小,不能覆盖人形机器人量产需求。根据哈默纳科财报,截止2024年3月,哈默纳科谐波减速器产能为306万台/年。公司为应对下游人形机器人和工业机器人需求规划扩产,预计2026年哈默纳科产能将达347万台/年,整体扩产偏谨慎幅度较小,未能覆盖全球人形机器人量产增长需求。
国内谐波减速器厂商积极应对谐波减速器市场需求增长。绿的谐波、丰立智能、瑞迪智驱、丰光精密和科达利等公司通过研发投入、技术创新、先进的加工设备、工艺优化、产品升级和明确扩产计划,展现强劲的市场竞争力和进口替代趋势。随着人形机器人量产加速,国内厂商有望凭借快速扩产优势,在全球市场中占据更大的份额。

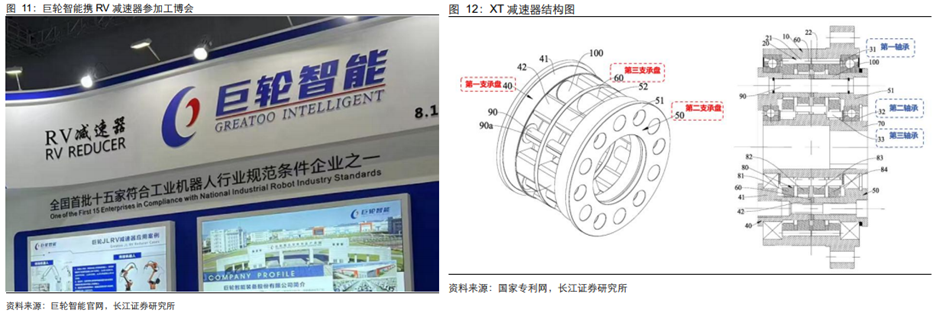
轻量化与性能优化需求下,新型减速器逐渐涌现。以XT减速器为例,巨轮智能研发的XT减速器通过结构优化,在相同体积下扭矩提升50%,重量仅为谐波减速器的一半,且解决了滑齿问题。性能上,其扭转刚度是谐波减速器的2倍以上、精度寿命是谐波减速器的2倍以上、传动效率也远高于谐波减速器,因此这是一款能够替代谐波减速器以及RV减速器,可全面应用在人形机器人的全新减速器。截至2025年5月28日巨轮智能XT减速器样机已装配完成,经检测满足人形机器人轻量化需求,提高减速器刚性、精度和寿命,但尚未进入量产阶段。
XT减速器是一种摆线针轮行星传动装置。通过第一支承盘、第二支承盘和中间支承盘形成稳定的输出机构,提高了传动装置的承载能力,以承载四片摆线轮的传动载荷,通过采用四个摆线轮的结构能够实现动平衡,且第一轴承和第二轴承选型较小,能够减少第一轴承和第二轴承所需的体积和质量,从而提高扭矩密度。进而能够使传动装置稳定的传递扭矩,提高疲劳强度、结构刚度和抗冲击能力,提高使用寿命,故同等条件下还可以采用较少的传力柱、采用较小的第一轴承和较小的第二轴承,实现传动装置的小型化。
2、行星滚柱丝杆:国产突破量产
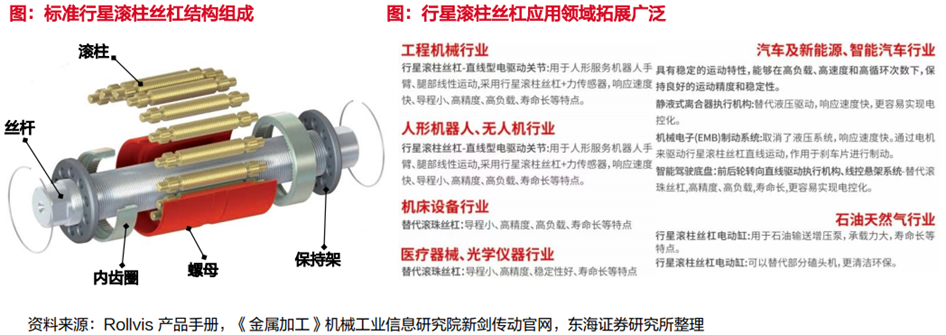
丝杠是一种将旋转运动转化为直线运动的机械传动装置,由螺杆和螺母组成,广泛应用于人形机器人的关节驱动系统(如线性执行器)。其核心作用是提供高精度、高负载的直线位移控制,直接影响机器人的运动灵活性、稳定性和负载能力。人形机器人中使用的丝杠包括梯形丝杠、滚珠丝杠和行星滚柱丝杠。
行星滚柱丝杠因其体积空间小、精度高、输出大,以及耐用稳定的性能等特点正被越来越广泛的应用在工业领域。在汽车工业、工程机械、机床设备、机器人、医疗器械、石油天然气等行业,行星滚柱丝杠技术正逐步替代现有技术体系成为主流技术方向。根据DATAINTELO的数据,2022年全球行星滚柱丝杠市场规模为12.7亿美元,全球市场规模仍较小。
行星滚柱丝杠量产三大壁垒:原材料、工艺流程与加工设备。丝杠对原材料的要求十分严苛。丝杠在反复运动过程中会受到连续振动、冲击和摩擦,因此对于材料的强度、刚性、耐磨性、耐腐蚀性、抗疲劳性、承载力等一定要求,普通的金属材料无法满足需求,通常需要特种金属材料来进行制备。高精度丝杠加工工艺复杂周期长。磨削丝杠产品一致性较高,有统一的标准,经过多道工序包括热处理、车削和磨削等多道工序,生产周期较长在30天以上,适合用于高精度设备的定位部件。行星滚柱丝杠所需多种高端加工设备。行星滚柱丝杠工艺过程中所需高精度螺纹磨床、车削中心、精密磨床、旋风铣床、数控机床、热处理设备、尖端检测仪器等多样高端复杂设备。高精度磨床、检测设备以德国、日本品牌为主。

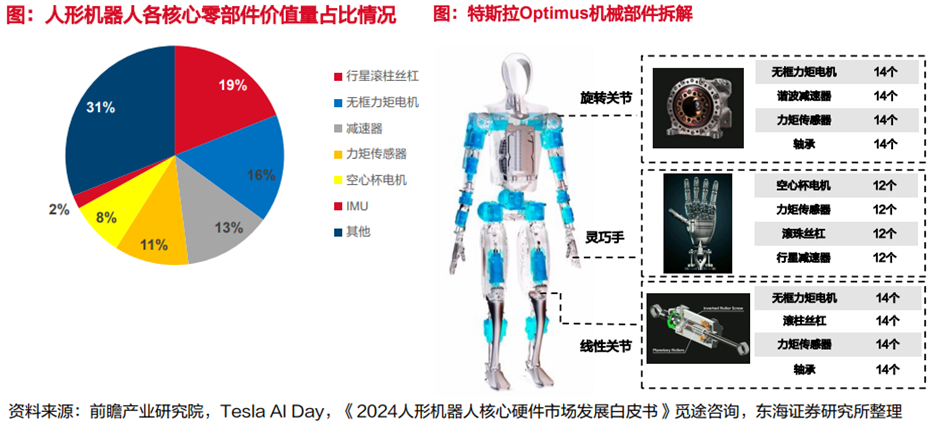
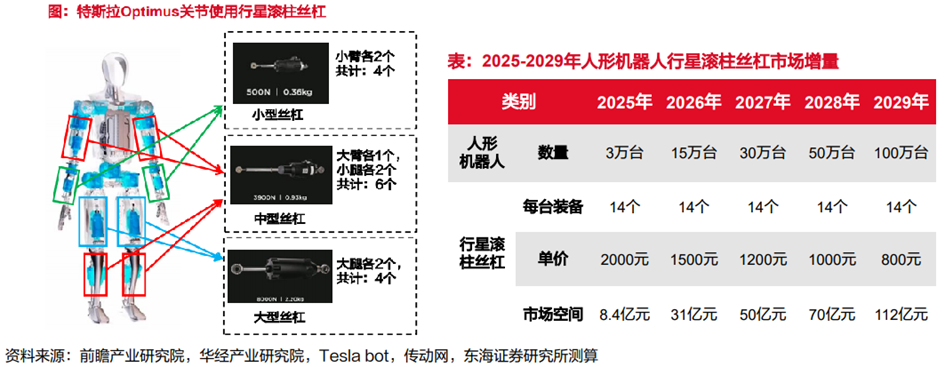
受益人形机器人产业兴起,滚柱丝杠市场空间抬升。行星滚柱丝杠可使其关节在承受较大负载时仍能保持稳定运动。Optimus机器人的机械部件方案中,线性关节14个,其由14台行星滚柱丝杠组成。根据人形机器人主要厂商量产进程推测,预计2029年全球行星滚柱丝杠市场增量空间将达112亿元,行星滚柱丝杠市场空间弹性巨大。
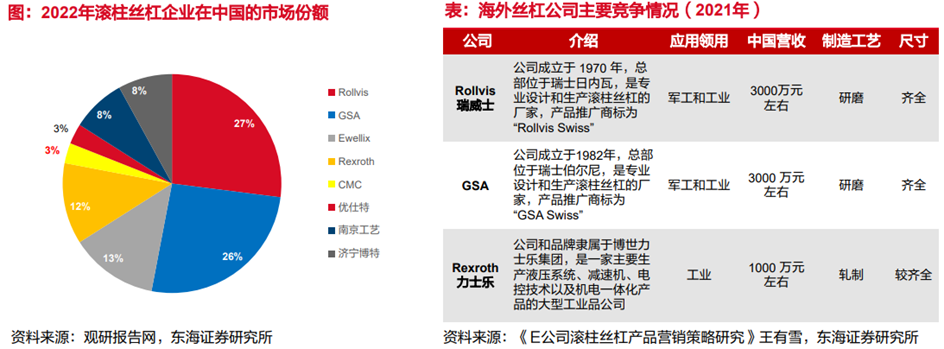
欧洲厂商主导市场,国产替代预期显现。2022年我国滚柱丝杠市场份额排名前四的欧洲厂家分别是Rollvis(瑞士)、GSA(瑞士)、Ewellix(瑞典)、Rexroth(德国),市占率分别为27%、26%、13%、12%,共计占比78%;国内南京工艺市占率为8%。行星滚柱丝杠国产化程度较低、制造量产难度大,主要高端厂商集中在欧洲。未来人形机器人量产带动丝杠需求提升,欧美厂商扩产速度不及国内,国产化将迎来重大机遇。
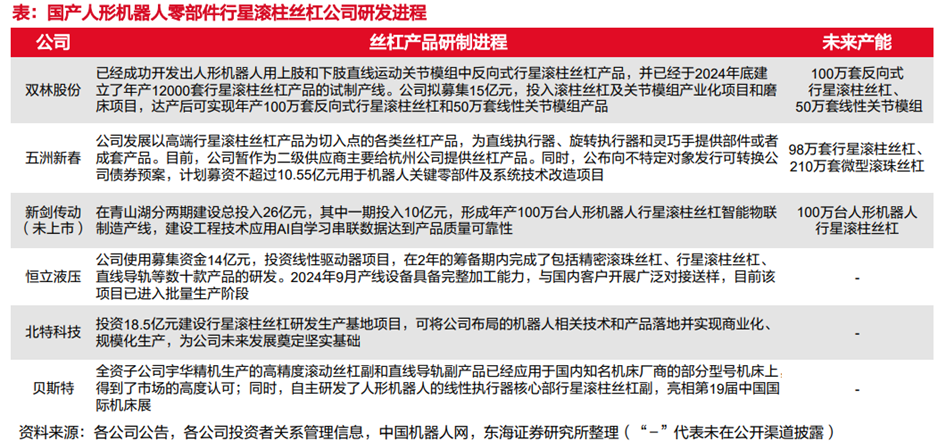
国内产品在执行效率、承载能力、使用寿命和导程精度上与Rollvis、GSA和Ewellix等知名国外企业有性能差距。国内企业正通过研发创新实现逐步突破。如,新剑传动目前行星滚柱丝杠已经获得特斯拉定点,得到下游客户认可;2022年行星滚柱丝杠业务实现2368万元收入,同比增长1419.6%。公司为进一步保持行星滚柱丝杠的领先地位和产能提升,满足市场需求,分两期建设总投入26亿元,其中一期投入10亿元,形成年产100万台人形机器人行星滚柱丝杠智能物联制造产线。
3、电机:无框力矩与空心杯,共启人形机器人动力新纪元
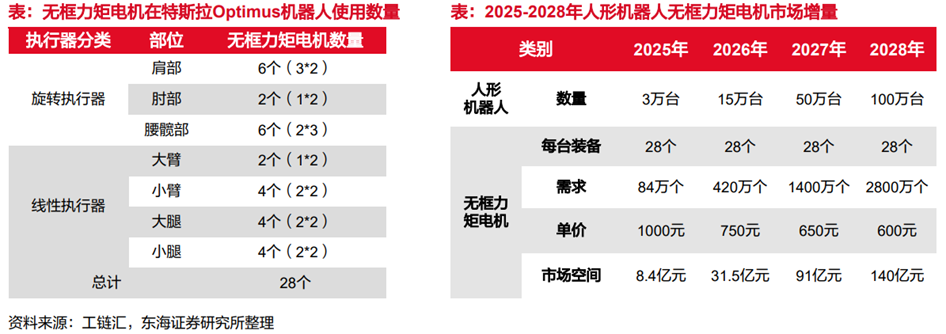
人形机器人电机是驱动机器人的各个关节进行运动的核心部件,在机器人系统中的作用包括提供所需的驱动力,以及通过控制电机转速和扭矩来实现机器人运动的精确调节。特斯拉Optimus机器人中有两类电机用量比较大,即无框力矩电机和空心杯电机。
无框力矩电机没有固定的外框架,它的结构通常是由定子和转子组成,没有轴、轴承、外壳、反馈或端盖。转子直接承载负载,而定子则由外部驱动系统提供动力。这种电机通常在旋转关节、线性关节中使用。
无框力矩电机因其特性与人形机器人关节的需求高度契合,已成为该领域的主流驱动方案。主要体现在:1)快速响应,指令信号至目标状态的转换时间达毫秒级,显著提升关节启停灵敏度,完美适配仿人运动所需的高频动作切换场景。2)高能量密度,通过磁路拓扑优化和铁芯结构精简,在同等体积下实现扭矩密度突破,满足关节空间受限下的高功率输出需求。3)空间适应性,支持深度嵌入式集成,可灵活适配从指关节到髋关节的全尺度定制化装配。

特斯拉Optimus人形机器人方案中,其28个关节执行器系统均以高功率密度无框力矩电机为核心驱动单元。其中,14个旋转关节由无框力矩电机 谐波减速器组成,模拟人体旋转自由度。另外,14个直线结构关节由无框力矩电机 行星滚柱丝杠组成,模拟人体线性伸缩肌群,如肱二头肌。旋转关节提供多向活动能力,直线执行器生成仿肌腱牵引力,为动态平衡与精细操作奠定硬件基础。根据人形机器人主要厂商量产进程和每台装配数量推测,预计2029年全球无框力矩电机市场增量空间将达140亿元。
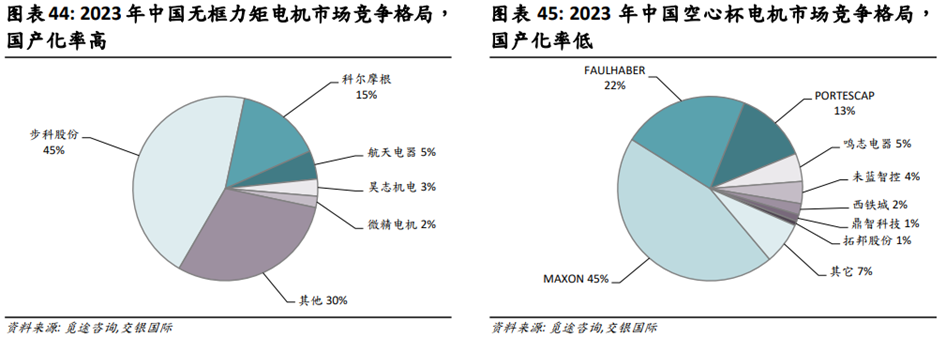
无框力矩电机头部集中度高,中低端产品国产化程度高。无框力矩电机目前还存在较高的技术壁垒,中国内地只有少量厂商能提供品质较高的无框力矩电机。其中步科股份依靠生产技术和较低的成本占据了较大的市场,是行业最大的无框力矩电机供应商。目前除了少量高端应用场景需要使用科尔摩根等国外厂商的无框力矩电机,大部分下游场景都已经开始使用国产产品,因此国产化程度高。
人形机器人有望带动空心杯电机需求大幅增长。空心杯自1930s起,至今已有80年的历史,空心杯电机最初由于价格较高,商业化难以进行。1960s汽车制造商可以用较低廉的价格购买空心杯电机,迅速使空心杯电机成为最受欢迎的电机产品之一。空心杯电机提供了在不影响电池寿命及性能的情况下更轻、更敏捷的人形机器人所需的效率和功率密度,将随特斯拉人形机器人的量产推进逐步放量。
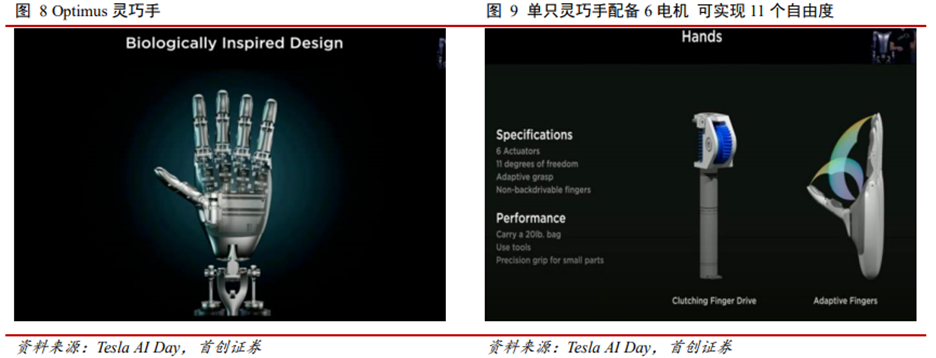
空心杯电机市场集中度高,但仍以外资主导。空心杯电机的转子没有铁芯,采用的是绕制在空心杯状结构上的铜线。这种设计使得空心杯电机能够在较小体积下提供较高的功率密度。空心杯电机在灵巧手中使用,单只灵巧手有6个空心杯电机,大拇指使用两个空心杯电机,其余四个手指均有一个空心杯电机。
全球空心杯电机市场知名企业包括Faulhaber、Portescap、Allied Motion Technologies、Maxon Motor及Nidec Copal Corporation,这些企业在空心杯电机的设计、制造以及技术创新方面处于领先地位,高端空心杯电机直径可以做到3-5mm。中国内地企业进入空心杯行业较晚,目前参与该产品市场的企业都以小批量出货为主,量产能力有待提升。2023年Maxon、Faulhaber和Portescap占据了中国内地空心杯电机市场79%的份额,中国内地企业中鸣志电器是空心杯龙头,2023年在中国内地空心杯市场市场份额为5%,其通过收购美国Lin Engineering和瑞士Technosoft Motion AG获得了空心杯电机的领先技术。
4、传感器:机器人的感知部件,种类繁多且需求量大
人形机器人传感器主要分为以下几类:
力觉/力矩传感器:包含本体单元和应变检测,由力敏元件、转换元件和信号处理单元等将力矩转换为电信号输出,在机器人手腕、脚踝处作用重要。其中六维力传感器可同时测量三个正交力和三个正扭矩,多用于复杂的力控操作;
视觉传感器:通过光学镜头和感光元件接收环境信息,将光信号转换为电信号,结合算法提取图像中的关键信息,可分为2D方案和3D方案,其中3D光学识别又包括结构光、TOF、双目视觉等技术类别;
触觉传感器:利用压敏电阻、极板间电容的变化、压电效应等方式检测触力、压力、纹理等,将受力信息转换为电信号,主要有MEMS和电子皮肤两种技术路线;
定位传感器:惯导IMU基于惯性定律,测量单元的核心组成是加速度计和陀螺仪,检测物体的加速度和角速度,通过积分得到物体的位移数据和旋转角度。
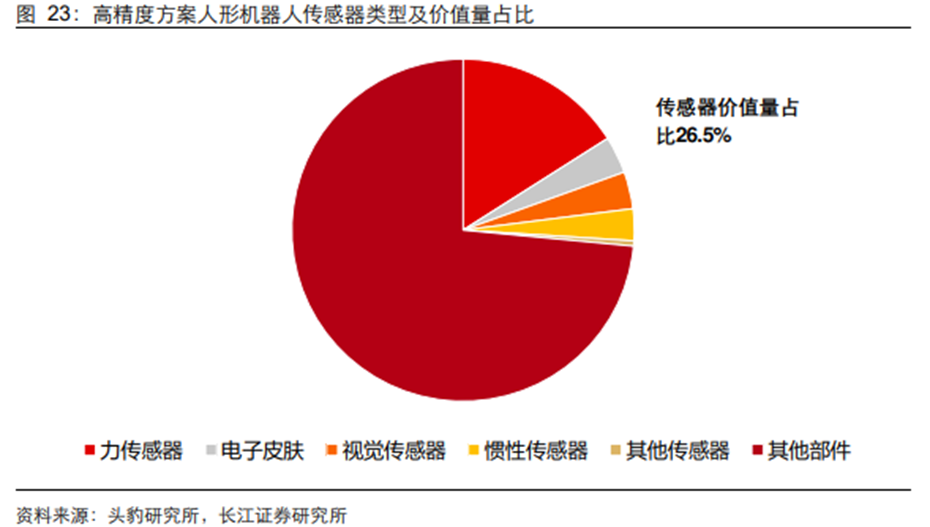
传统传感器价值量较低,力传感器、电子皮肤、视觉传感器、惯性传感器等价值量较高。力传感器、电子皮肤、视觉传感器、惯性传感器等传感器,不仅因其高价值量而受到重视,更因其与人形机器人的智能化、仿生化和高自由度等发展方向紧密相连,对提升机器人性能具有决定性作用,这些传感器具有较大的市场潜力。高精度机器人方案中传感器价值量占比约为26%,其中力传感器、电子皮肤、视觉传感器和惯性传感器(IMU)分别占比16%、3.5%、3.5%、3%,其他传感器包含电流传感器、温度传感器、颗粒传感器合计占比约为0.5%。
1)力传感器,按照测量维度可以分为一至六维力传感器。最常见的是一维、三维和六维力传感器。在指定的直角坐标系内,传感器如果能同时测量沿三个坐标轴方向的力和绕三个坐标轴方向的力矩,则称为六维力传感器。一维、三维和六维力传感器分别适用于不同的场景。
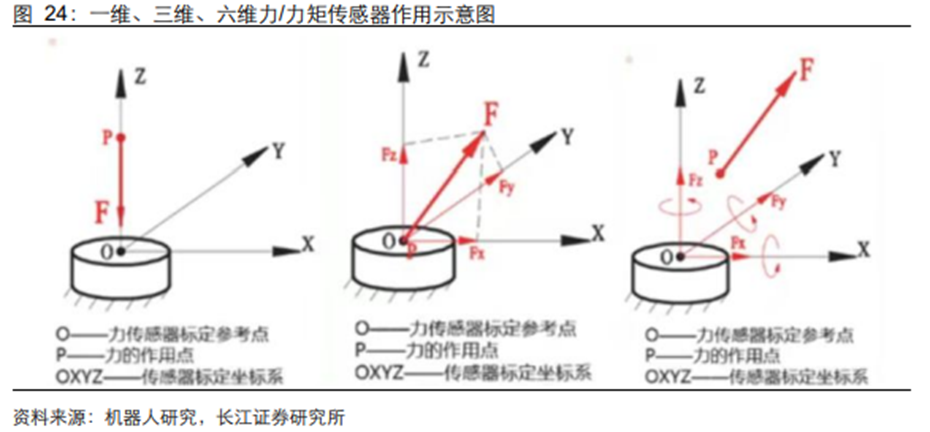
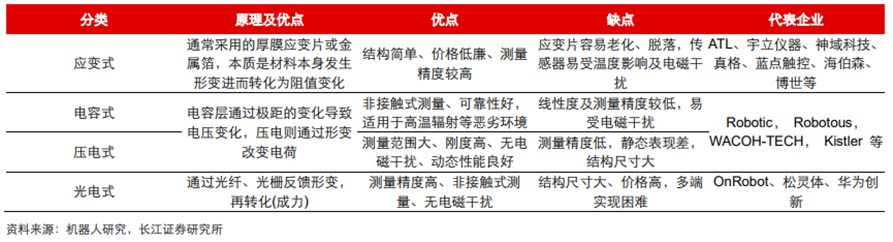
根据感力原件的不同,力传感器主要分为三类:应变式力传感器、光学式传感器以及压电式力传感器。其中电阻应变式是应用最广泛、研究也比较成熟的一类,其采用的是硅应变片或金属箔,本质是材料本身发生形变进而转化为阻值变化;光学式传感器,通过光栅反映形变,再转化成力;压电式传感器,将被测物理量变化转换成压电材料因受机械力产生静电电荷或电压变化的传感器,可分为电容和压电两种,电容是通过极距的变化导致电压变化,压电则是通过形变改变电荷。
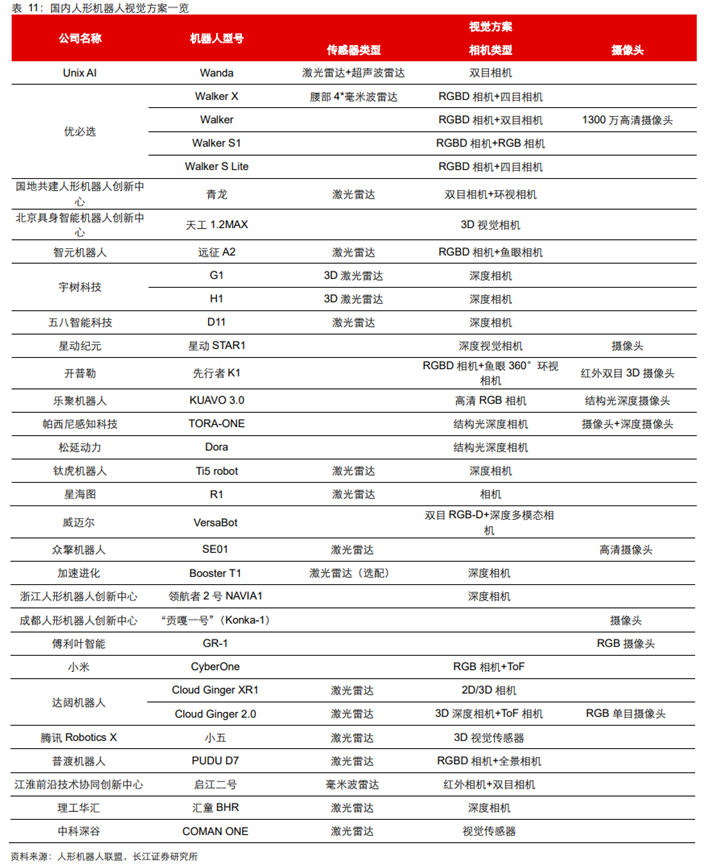
2)视觉传感器:旨在利用机器来执行视觉识别和判断任务。在工业生产中,机器视觉的引入旨在提升效率、减少误差、降低成本,并从繁重或危险的工作环境中解放人力。人类约70%的信息是通过人眼感知获取的,人形机器人也将通过视觉感知获取大量信息。目前在视觉方案上,每家人形机器人主机厂选择的方案有所差异,随着未来人形机器人出货量的增长,技术的迭代升级,未来视觉方案也将会逐步优化定型。特斯拉Optimus采用纯视觉传感器方案,搭载了2D视觉传感器和与特斯拉车辆相同的FSD技术以及Autopilot相关神经网络技术。人形机器人视觉方案目前主要以结构光、双目或多目RGB、TOF等的组合方案为主;算法基础强的厂商会采用更为简单的传感器方案,而算法相对薄弱的厂商会选择更为核心的硬件。
3)触觉传感器:目前触觉传感器的主要有MEMS(微机电系统)和电子皮肤两种主流技术路线。MEMS传感器体积小、功耗低、量产工艺成熟、成本低,可集成压力、温度、加速度等多种传感器至一颗芯片上,多种传感器集合在机器人硬质皮肤上。Optimus Gen2就可能采用的是压阻式MEMS传感器。

电子皮肤是柔性触觉传感器的一种称呼,结合了电子和材料两大学科,能够模拟人类皮肤对温度、湿度、震动以及接触物体的材质和软硬程度等关键特性,在手指、手臂等部位放置传感器整列。以日本东京早稻田大学子公司XELA Robotics发布的uSkin电子皮肤为例,小巧、轻薄、柔性设计,有1×1、2×1、2×2、4×4、4×6多种规格的传感器阵列。
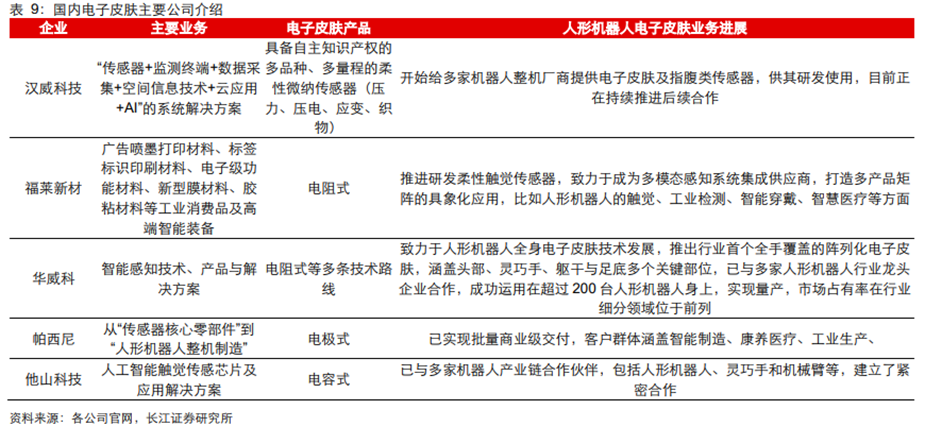
国内汉威科技、华威科、帕西尼等企业现已布局机器人电子皮肤产品。汉威科技柔性微纳传感器业务主要由控股子公司苏州能斯达开展,此外,公司投资了主要从事柔弹性传感器的韧和科技。华威科采用IDM模式,打通生产装备、材料、工艺、器件研发全链条环节,涵盖柔性射频器件、柔性电子皮肤、柔性覆冰监测传感器等产品,终端覆盖人形机器人、汽车、医疗、新能源等多个领域。帕西尼专业级机器人ITPU触觉传感器功能强大,在三维/六维力检测的基础上,安装在PX-6AX上的柔性传感阵列能额外为机器人提供滑动、摩擦、纹理、温度等额外信息,使得机器人能在更丰富多元的场景下感知。
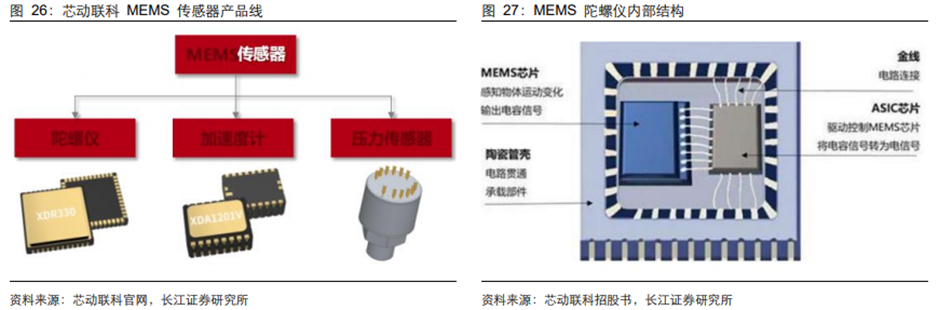
4)惯性传感器(IMU):惯性导航是一种不依赖于外部输入信息、也不向外部辐射能量的自主式导航方式。其基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度和角速度,然后对时间进行积分,再变换到导航坐标系中,从而得到载体在导航坐标系中的姿态和位置等信息,实现导航的目的。惯性测量单元(Inertial Measurement Unit,简写IMU)中陀螺仪和加速度计是基础核心器件,其性能高低直接决定惯性系统的整体表现。
由于人形机器人对惯性导航传感器小型化、集成化、大批量生产的需求,硅基MEMS惯性传感器成为主要发展方向,光学IMU则用于低成本敏感度的高精度领域如航天、国防、海上导航等。MEMS惯性传感器主要构成包含一颗微机械(MEMS)芯片和一颗专用控制电路(ASIC)芯片。
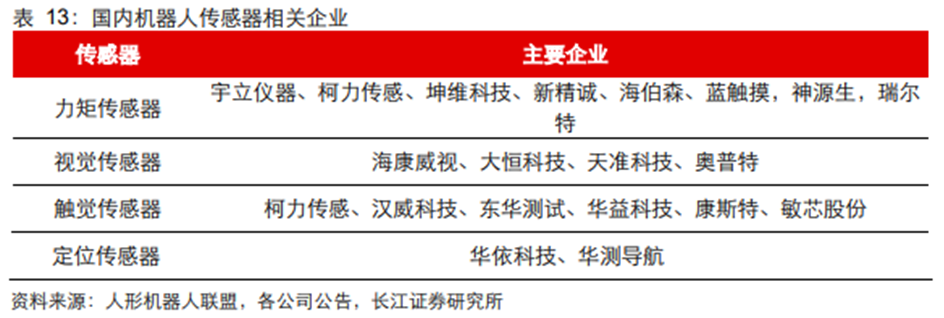
目前国内布局人形机器人传感器企业较多。力矩传感器方面,六维力矩传感器技术壁垒较高,涉及设备、工艺和零部件的复杂性,国内企业如宇立仪器、柯力传感、坤维科技等已有较大突破;视觉传感器方面,以海康威视、大恒科技、天准科技、奥普特为代表的本土机器视觉企业,在核心零部件技术、独立软件算法等领域进行了大力投资。触觉传感器方面,国内主要布局厂商包括柯力传感(指尖触觉)、汉威科技(柔性传感器)、东华测试、华益科技、康斯特、敏芯股份(关节扭矩与平衡);定位传感器方面,惯性传感器MEMS芯片/传感器厂商、IMU模块公司如华依科技、华测导航有望迎来机会。
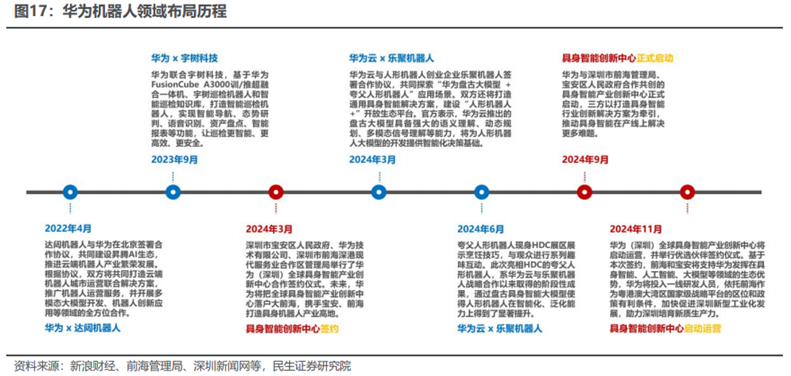
5、灵巧手:多种技术路线并行,国内企业快速追赶
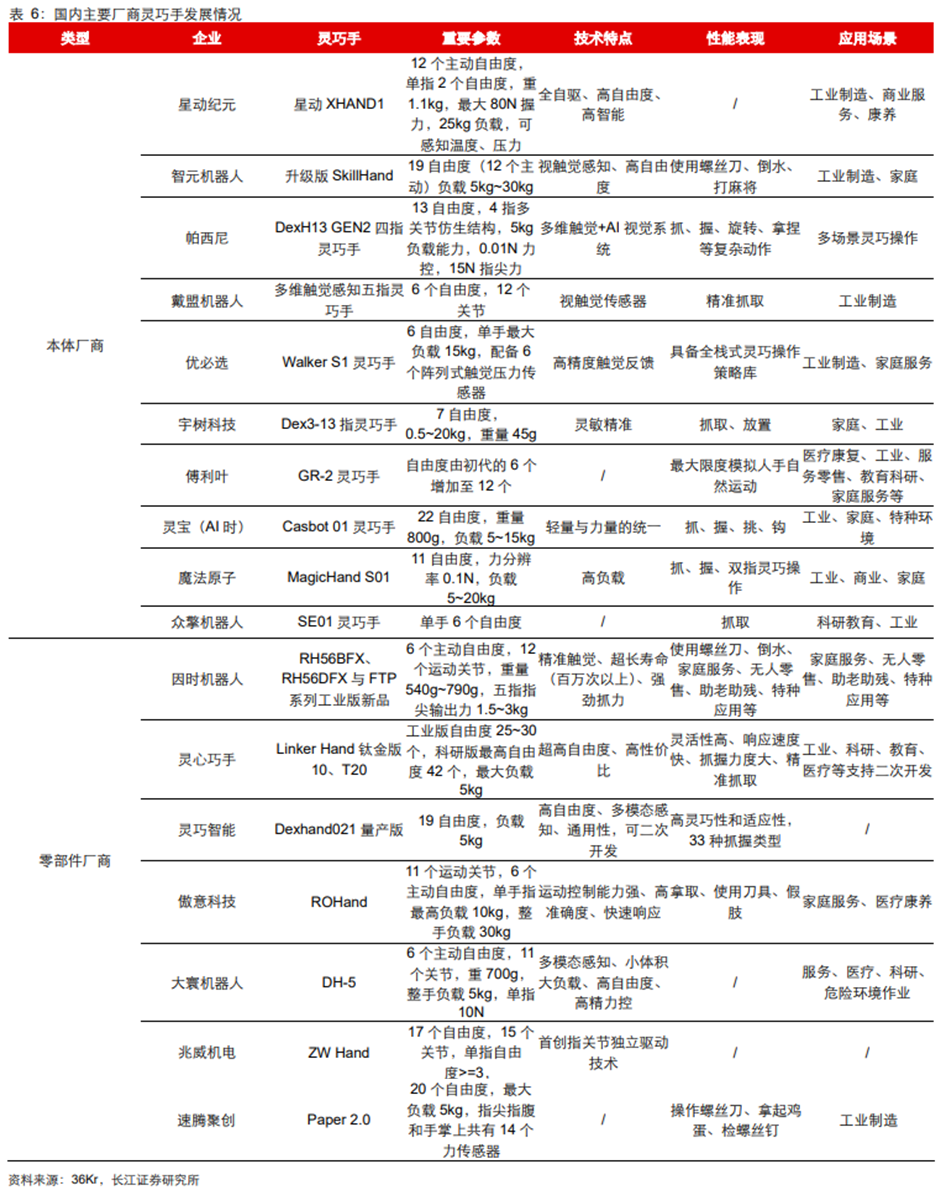
国内人形机器人灵巧手百花齐放,众多厂商布局该行业。国内灵巧手领域的企业主要有两类:1)人形机器人本体厂商,部分开发并对外出售灵巧手产品,如智元机器人、帕西尼、星动纪元等,有些则只生产人形机器人本体,但灵巧手自研,如灵宝CASBOT、魔法原子等。目前绝大多数人形机器人本体厂商仍处于第一代灵巧手研发生产阶段,少部分本体厂商(如智元机器人、优必选、戴盟机器人、傅利叶)灵巧手已经进展到第二代、第三代。2)国内人形机器人产业链上游零部件厂商,如因时机器人、傲意科技、灵巧智能、灵心巧手、忆海原识、兆威机电等,供应灵巧手产品但不供应本体。相较于本体厂商,在产业链上游的零部件厂商在灵巧手性能及商业化量产方面较为领先。
传动方案包含直接驱动和间接驱动,其中直驱方案精度高但成本大。直接驱动:电机搭配减速系统直接控制关节,无需传动部件,动力传输路径短,能量损耗小。控制精度高,响应速度快,适合高精度操作。每个关节都需要电机和减速系统,成本随着自由度增加而显著上升。间接驱动:电机与减速系统输出转矩经丝杠/蜗轮蜗杆转换为直线运动,再经腱绳/连杆驱动关节,动力传输路径长,能量损耗相对较大。控制精度受传动部件影响,可通过优化设计和控制算法提高精度。电机集中安装,可减少电机数量,通过优化设计和批量采购可降低成本。
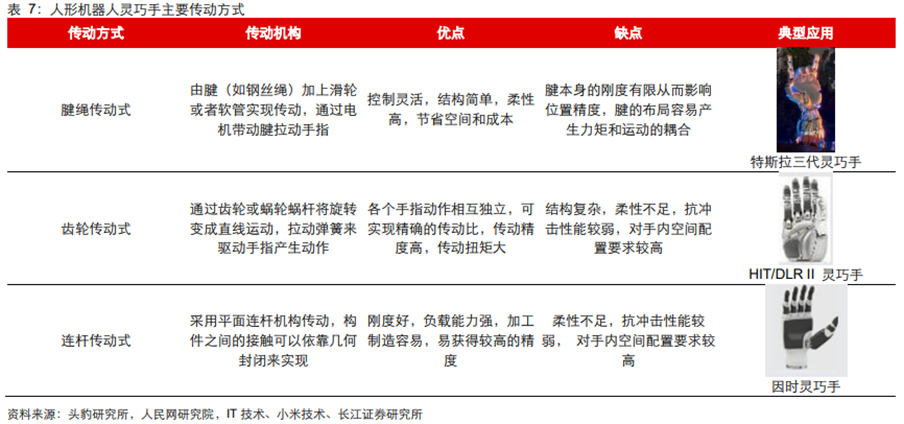
目前传动方案以间驱为主,且细分技术还没收敛。非直驱方案传动方案包括微型丝杠或蜗轮蜗杆(将旋转运动转为直线)搭配腱绳或连杆(将直线运动传递至关节),目前微型滚珠丝杠 腱绳为主流方案。连杆传动多用于工业和商业用途,多个连杆串并联混合使用形式比较常见。手指的运动和动力由刚性连杆传递,能够抓取大型的物体且结构设计紧凑,可以完成包络抓取。但在远距离控制上比较困难,容易发生弹射,抓取空间较小。齿轮传动在工业机器人中应用比较广泛,可获得稳定的传动比,传递效率高,可靠性更强。但齿轮传动本身质量加大整体的质量和惯性而显得比较笨重。腱绳传动目前灵巧手研究中应用最为广泛的传动方式。腱绳传动在一定程度模拟人手肌腱结构,线绳传动使得大型驱动器可远离执行机构,减轻末端负载和惯量,提升抓取速度,适合空间较小且需要驱动自由度数目较多的传动场合。但本身有负载能力弱、预紧力变化大、负载越大效率越低的局限性。
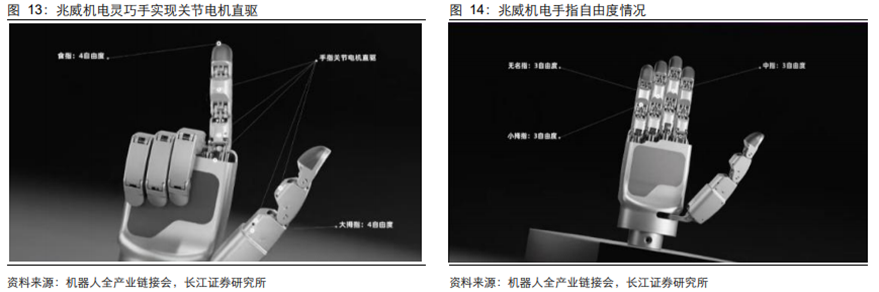
直驱方案逐渐兴起,兆威机电和星动纪元等推出相关直驱灵巧手。兆威机电新灵巧手采用独创的单关节驱动技术实现电机关节内置,整手配备17个主动执行单元,单指节拥有3个及以上主动执行单元,整手通过仿生学原理设计有17个自由度,单只手指自由度大于等于3个,可扩至20个,能模拟人手难及动作,在自由度方面达到了行业领先水平。
星动XHAND1作为星动纪元首创的关节全直驱仿人五指灵巧手和成人人手大小相仿,在VPP模型的训练和验证中展现出了独特的优势。其全直驱方案通过齿轮直接驱动,省去了复杂绳驱、连杆的传动机构,配备12个全主动自由度,使速度响应更快,单指能实现10次点击/秒,堪比电竞选手的“电竞手”,从而迅速执行VPP模型发出的操作指令。
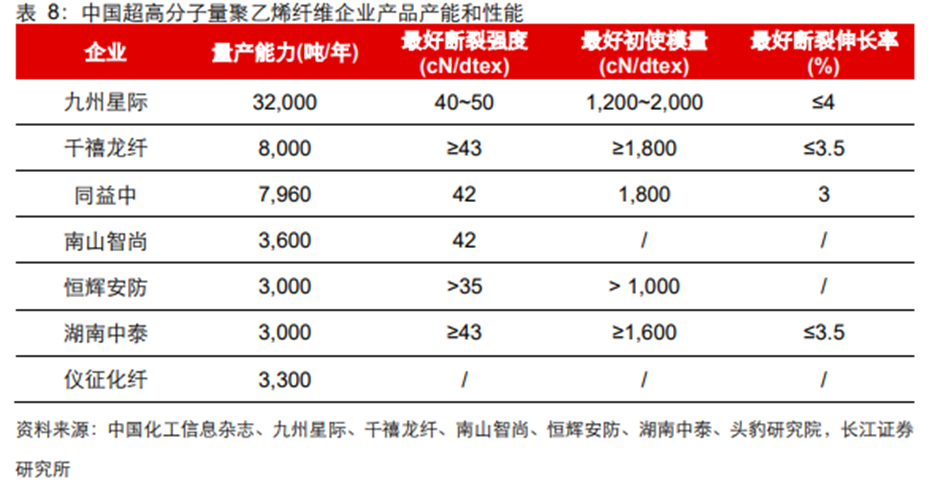
腱绳传动式中腱绳是灵巧手的“肌腱”,通过牵引手指活动,完成各种动作,目前超高分子量聚乙烯纤维是主流的腱绳材料。早期使用的腱绳材料有特氟龙、芳纶纤维、涤纶等。目前,超高分子量聚乙烯纤维,简称UHMWPE纤维,别名又叫做高强高模聚乙烯纤维,是分子量150万以上的无支链的线性聚乙烯。与碳纤维、芳纶合称为“世界三大高科技纤维”。具有超高强度、超高模量、低密度、耐磨损、耐低温、耐紫外线、抗屏蔽、柔韧性好、冲击能量吸收高及耐强酸、强碱、化学腐蚀等众多的优异性能。目前国内九州星际、千禧龙纤、同益中、南山智尚、恒辉安防、湖南中泰、仪征化纤等企业布局超高分子量聚乙烯纤维。
6、“大小脑”:构建通用泛化的具身智能大模型
人形机器人是机器人与人工智能两大产业交汇的关键载体,其发展核心在于实现具身智能——即赋予机器人物理实体,使其能自主感知、决策并与物理世界交互,从而具备通用场景的泛化能力,摆脱传统工业机器人依赖预设程序的局限。然而,尽管硬件基础通过渐进式创新已不断夯实,但实现通用性、走向规模商业化的最大瓶颈在于软件算法层面,产业正迫切期待在人形机器人“大小脑”核心模型上出现一次颠覆式创新,以突破当前仅能在特定场景工作的局限。
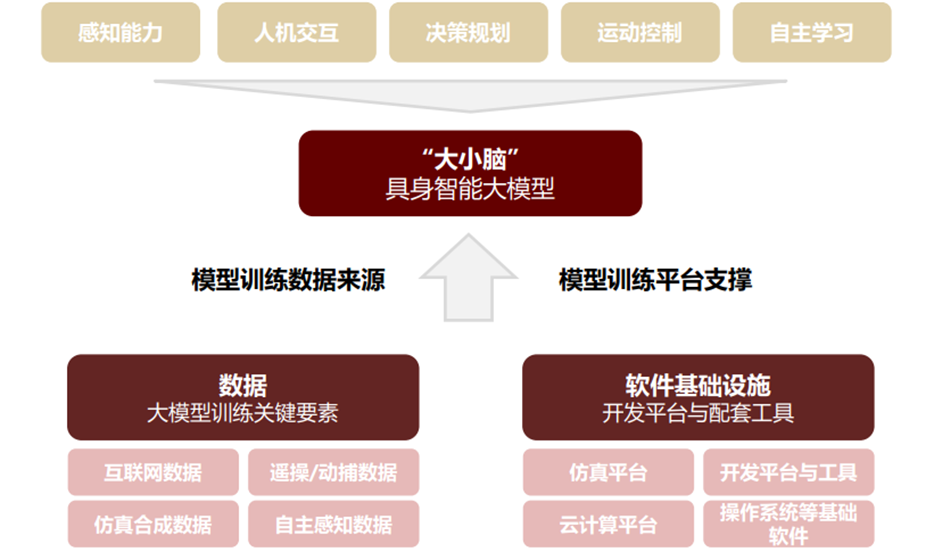
人形机器人的软件体系以实现通用泛化的“大小脑”为核心,由本体企业主导“小脑”并探索“大脑”,大模型公司以多模态算法赋能“大脑”,同时面临数据瓶颈,并依赖仿真与开发平台等基础设施的支撑。
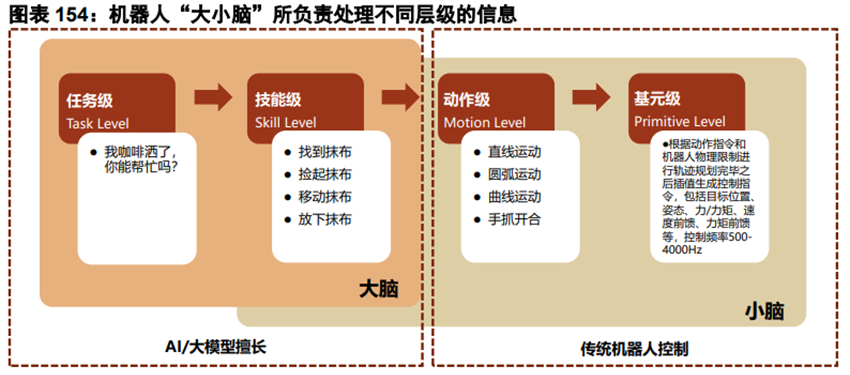
“大脑”负责感知和规划决策:“大脑”处于相对“高级别”的功能层级,主要提供机器人所需要的顶层感知、理解、规划、推理能力。在人形机器人的运动流程中,“大脑”主要处理的是从任务级到技能级的过程环节,其能够理解自然语言指令,解析任务需求,整合来自于视觉等各类模态传感器的信息,进行任务的规划和具体细分技能和动作策略的拆解。近年来AI大模型尤其是在多模态大模型领域持续迭代,持续赋能机器人“大脑”层级的进步。
“小脑”负责运动控制:“小脑”处于相对“低级别”的功能层级,主要负责将抽象的动作规划与策略转化为具体的操作并控制执行。“小脑”主要处理的是动作级到基元级的过程环节,在接受“大脑”制定的运动策略后,生成精准的控制指令驱动机器人“躯干”完成动作的执行,并根据具体环境进行适当的优化调整。目前“小脑”的职能主要还是由底层的运动控制系统结合一些控制领域的AI小模型来进行承担。
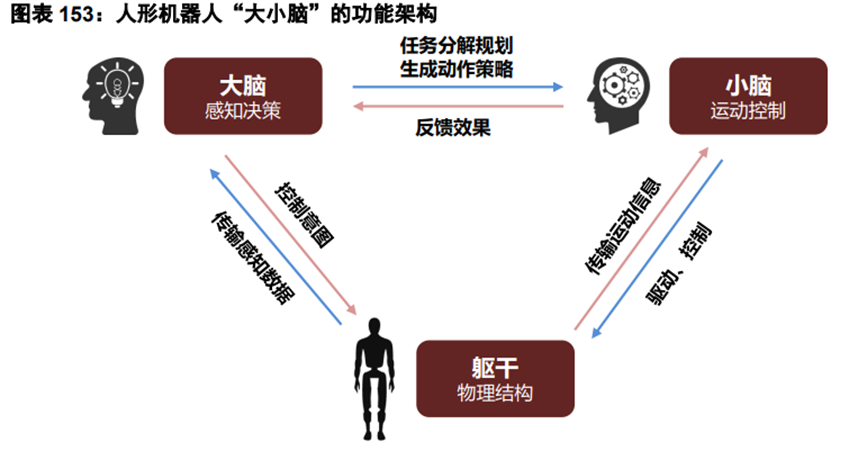
“大小脑”任务的本质是将任务级的指令逐步转化为基元级的控制指令。“大脑”最初接受到的是用户通过自然语言等形式下达的任务级指令(比如“我想喝杯水,你能够帮忙吗?”),然后“大脑”会将任务规划为对应的操作技能(比如“找到水壶、找到水杯、拿起水壶、给杯子倒水、放下水壶”),并继续拆解为具体的动作指令(比如直线运动、圆弧运动、曲线运动、手抓开合等);而后“小脑”再对动作指令进行接受处理,并根据动作指令和机器人物理硬件的限制,生成具体的轨迹规划并最终生成可执行的控制指令(比如目标位置、姿态、力及力矩、速度前馈等),最终再由具体的硬件模块执行控制指令,完成操作任务。
“大小脑”分层架构是当下的主流,一体化端到端路线也在积极探索。“大脑”与“小脑”更多是在功能层级上的划分定义,而在具体的机器人模型架构上,产业既有分层模型架构的技术路线,也有端到端模型架构的技术路线。在当前较为主流的分层架构中,“大脑”与“小脑”分别作为不同的层级由多个神经网络分别训练优化再进行整合,比如可能是由多模态大模型作为“大脑”,再由多个小模型结合运动控制算法组成“小脑”。而端到端模型的理念是要直接实现以人类指令作为输入,机器人动作指令作为输出的端到端方案,“大小脑”可能会走向一体化,作为一个统一的机器人大模型进行训练,最终控制机器人整体的感知规划和运动轨迹。而当前的产业发展也尚处早期,技术路线远未收敛,未来各大路径均有规模化应用的可能。
(1)“大脑”:多模态大模型赋能,算法迭代加速
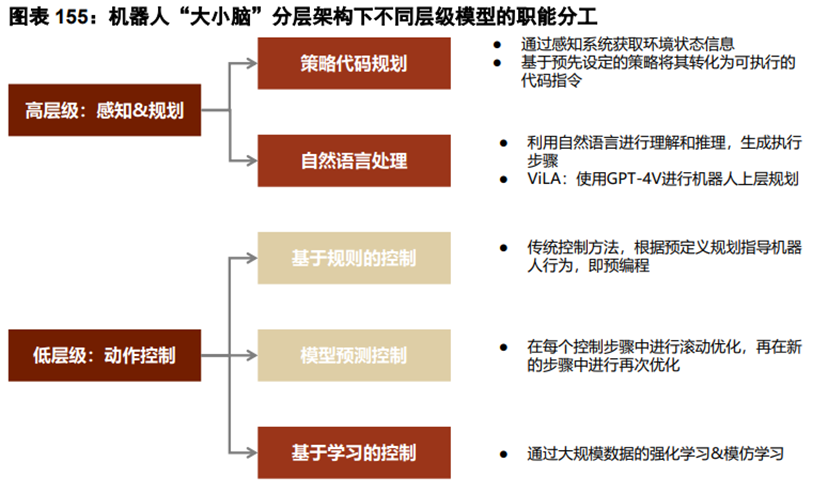
感知与规划是“大脑”的主要职能,也是多模态大模型的能力范围。人形机器人“大脑”一方面需要负责通过感知系统获取多种模态的环境状态信息,同时与使用者通过自然语言等方式进行人机交互;另一方面则需要基于预先设定的策略结合一定的智能推理能力将任务进行规划分解,并转化为可执行的动作策略或代码指令。而这其中所需要的多模态理解、自然语言处理、模型推理以及代码生成均是目前的多模态大模型,尤其是视觉语言大模型(VLM)所擅长的能力。因此目前在行业中众多落地的人形机器人应用中,都是由多模态大模型来担当“大脑”的角色。
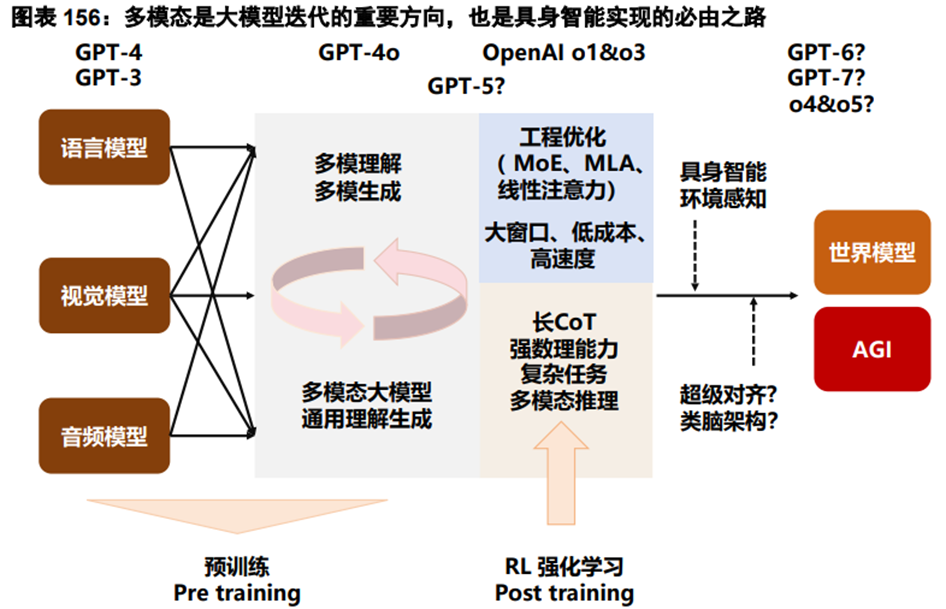
多模态大模型加速迭代,端到端、多模融合与多模推理为聚焦方向。从大模型产业本身的发展趋势来看,多模态已经成为行业中众多参与者重点突破的方向。虽然目前包括OpenAI GPT、Google Gemini、字节豆包等海内外行业头部模型在多模态感知和多模态生成上已有许多成果,但在多模态感知与生成的融合、端到端多模态、多模态推理等方向仍有较大的进步空间。可以预见在未来数年多模态领域仍将是众多大模型大厂聚焦突破的方向。而实际上这些能力也是未来形成更为成熟的机器人“大脑”所必需具备的,这些前沿领域的成果也将为后续“大脑”能力的提升打下基础,或者说机器人“大脑”本身就是这些多模态大模型能力提升后最为直接的应用方向之一。
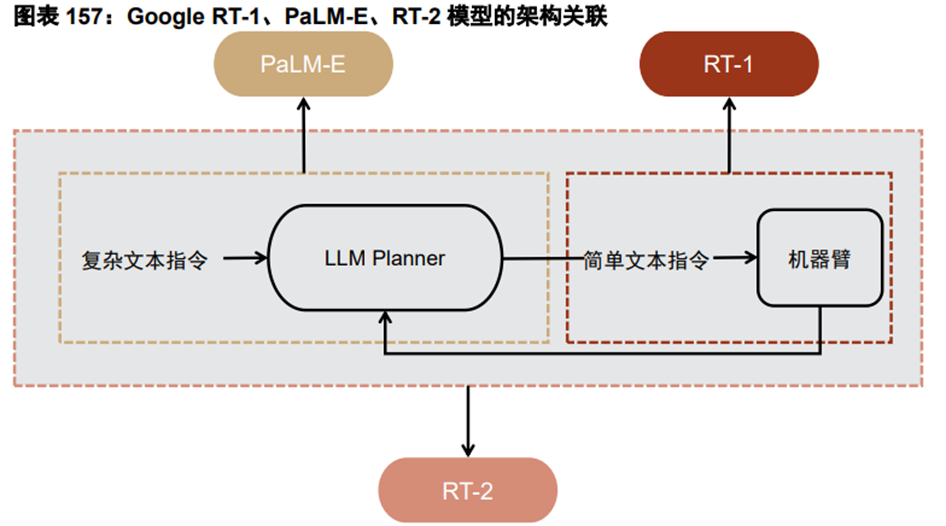
大模型大厂关注机器人“大脑”领域,在模型架构和技术路线上积极探索。由于广阔的行业前景,人形机器人“大脑”已经成为了多模态大模型最为重要的垂类分支之一,众多海内外大模型头部厂商都在这一领域加码投入探索。其中典型的就是Google在这一领域的工作,其在过去几年间发布的RT-1、PaLM-E、RT-2系列模型引领了多模态大模型与机器人应用融合的产业探索;而除了Google之外,字节跳动的GR-1、GR-2系列,OpenAI与Figure的合作探索等也均是模型厂商在“大脑”领域探索的案例。
从Google的探索看多模态大模型向人形机器人“大脑”的发展路径:在2022年Google发布的RT-1是行业中对于Transformer大模型与机器人领域应用最早的探索,其能够接受简单文本指令和图像输入,基于Transformer大模型进行处理,并转化为机械动作输出;之后Google又在23年推出了PaLM-E,其是首个具身领域的多模态视觉语言模型(VLM模型),能够接收复杂的任务要求以及图像输入,将其转化分解为简单的文本指令;而Google在23年下半年发布的RT-2则是对前两者的结合,其定位为多模态视觉语言动作模型(VLA模型),能够直接理解复杂的任务指令并生成控制指令,进而直接操作机械臂,能够认为RT-2也奠定了多模态大模型作为机器人“大脑”的技术路径。而在2025年3月,Google发布了新一期机器人大模型Gemini Robotics,在机器人泛化能力和空间推理方面又获提升,同时适配多形态机器人平台,目标构建类似安卓的通用机器人生态。
机器人本体厂商愈发重视“大脑”,与大模型公司竞合并行。除了Tesla等在AI模型领域积累深厚的企业之外,早期的机器人创业公司在“大脑”层面上大多依赖于大模型公司,接入其提供的大模型进行赋能;但随着产业的发展,本体厂商也愈发重视“大脑”作为产品的核心壁垒,更加倾向于加大投入自研大模型“大脑”,或者是与大模型厂商进行合作开发,希望在“大脑”层面掌握更强的竞争壁垒与行业话语权。
例如在24年之前,FigureAI与OpenAI持续合作,在“大脑”层面采用OpenAI的GPT模型作为支持;但在25年之后,双方也宣布合作中止,FigureAI也在25年发布了自研的端到端VLA模型Helix。而在国内,智元机器人也在25年3月推出了自研通用具身基座模型GO-1,此外还有更多包括银河通用、智平方、HillBot等在初期就以“大脑”作为核心壁垒的初创企业。但整体上看,能够认为未来机器人“大脑”的迭代还是需要大模型厂商与机器人企业共同推进,以通用多模态大模型的迭代为技术基础,机器人垂类领域的数据积累与场景应用为迭代关键。
(2)“小脑”:运动学控制为基,机器学习加持
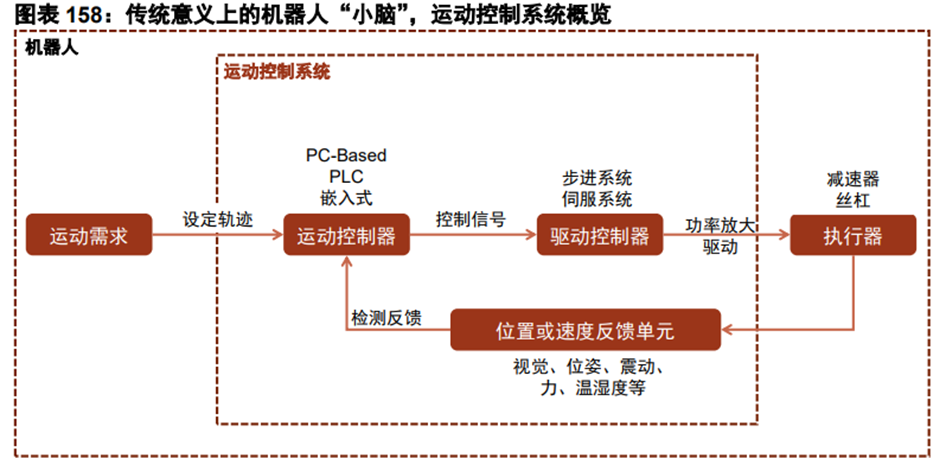
基于规则的控制是传统的机器人“小脑”技术路径。“小脑”的职能主要是负责机器人的运动轨迹规划与动作控制,其传统意义上的技术路径与工业机器人、工业母机等类似,主要的构成部分包括控制器、伺服驱动器、电机等,通过预编程的方式规划指导机器人的行为,最终实现在复杂条件下将预定的控制方案、规划指令转化为期望的精确机械运动(位置控制、速度控制、转矩控制等)。但相比之下传统工业机器人,人形机器人“小脑”又需要处理更多维度的输入信号,实现更高自由度的运动控制,因此在技术实现和应用水平上又提出了更高的要求。
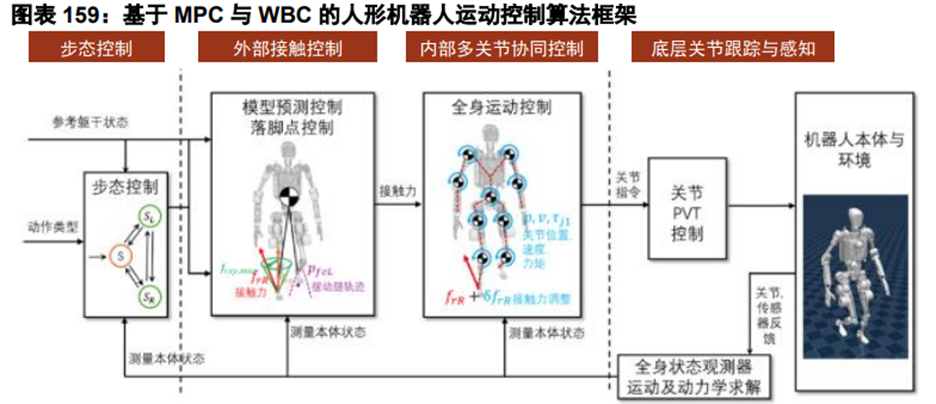
基于模型预测优化的控制,实现人形机器人的平衡与运动。为了应对更加复杂多样的人形机器人运动控制环境与动作需求,产业也多采用模型预测优化的方式来提升机器人控制的精确度与稳定性,即通过建立运动学与动力学模型,预测未来运动中的机器人状态,在运动的过程中对于每个控制步骤进行滚动优化,最终实现稳定和精确的运动轨迹规划和平衡控制。例如基于MPC(模型预测控制) WBC(全身控制) ZMP(零力矩点步态规划)的人形机器人运动控制框架就是行业中诸多厂商在“小脑”领域采用的较为成熟的方案。然而这类方案通常涉及较为复杂的机器人运动学与动力学模型建模,依赖于仿真测试与实机调试,且整体开发周期也相对较长。
机器学习赋能“小脑”,基于学习的控制加速迭代。在传统的基于运动学模型的控制方式之外,机器学习也在近年来被引入到机器人“小脑”的构建中,通过大规模数据的模仿学习或者强化学习来训练专有的运动控制和物理AI模型,从一定程度上降低运动学模型的高开发门槛,加速模型迭代效率。其中例如采用强化学习的控制方案,通常是采用从传感器输入直接到关节轨迹输出的端到端模式,通过预先设定好的奖励函数,使得机器人在与环境的交互中通过试错的方式自我学习和适应,进而最终实现最优化的运动执行策略。虽然目前在“小脑”领域依旧是传统的基于模型的控制更为成熟,机理明晰且具有更强的鲁棒性;但能够认为基于学习的控制方案也会持续进化,赋予人形机器人“小脑”更加自主高效的迭代速率。
(3)数据:“大小脑”模型训练的核心要素
机器人“大小脑”的迭代需要海量的优质数据支撑。当前的机器人“大小脑”算法很大程度上都依赖于基于大量数据的深度学习来进行训练,大量的优质多样性数据也是机器人实现通用泛化智能的基础。类似于大规模语言模型,机器人大模型理论上也能够延续Scaling-Law,通过更大量级的数据、算力来实现更大规模参数模型的训练,并且实现更强的通用性、泛化性和“智能涌现”。
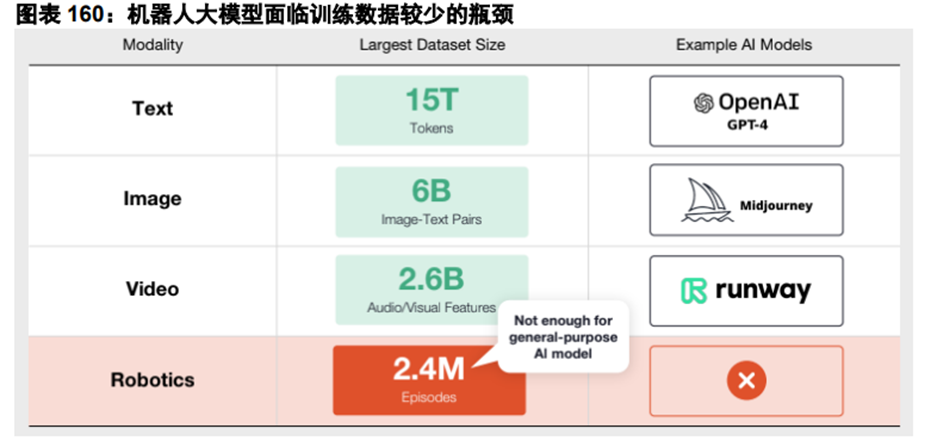
机器人“大小脑”模型所需的优质数据相对稀缺,尤其是对于端到端模型方案。由于机器人大模型的探索仍处于早期阶段,因此与其他类似的AI细分方向相比,其在训练数据方面的积累也较为薄弱,尤其是优质的端到端训练数据较为稀缺。例如在语言模型领域,OpenAI的GPT4所用的文本训练数据集有15T的大小;在文生图模型领域,Midjourney的图像训练数据集也有6B的大小;而相比之下,产业估计截至2024年在机器人模态领域的数据积累可能仅在2.4M量级,远远不足以支撑端到端通用机器人大模型的训练迭代。
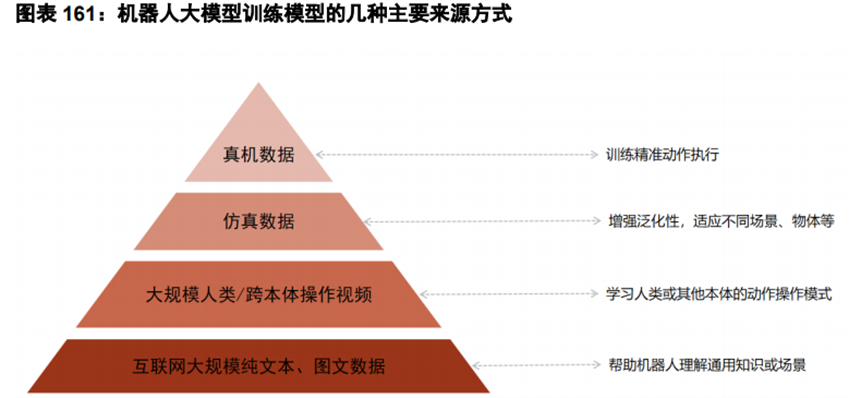
产业尝试采用多种方式,解决机器人训练数据端的瓶颈。目前机器人大模型的训练数据主要有几种来源,主要可以分为真实世界数据(真机数据)、仿真数据、互联网数据几种来源:
真实世界数据:来源于机器人实机的运动数据,主要是通过人工以远程操作或是动作捕捉等方式进行采集,这类数据的质量相对最高且更贴近实际的应用场景,但其在采集的过程中也需要较高的时间成本和人力成本,同时数据的多样性也较为有限。
仿真数据:基于大规模算力,通过仿真平台模拟出机器人的各类操作场景并进行模拟运算,进而得到大规模的仿真合成数据并进行训练,这也是在当前技术条件下实现规模化机器人训练数据生成最为可行的技术路径,例如英伟达推出的Issac Sim仿真平台目前就已在行业中得到广泛应用。同时虽然仿真数据具有易于规模化和灵活可调整的优势,但其在与实机之间的双向偏差问题仍存在一定的局限性。
互联网数据:大多来自于互联网中的人类活动的视频,让机器人通过多模态模型“大脑”直接理解、学习和模仿视频中的人类动作。这类数据覆盖的场景和语义最为丰富、且获取的难度最低,但缺点也在于缺少精确的物理交互信息,因此其更多是作为多模态数据在训练的过程中进行补充,使得机器人能够学习到一些常识性的信息。
机器人大模型的“数据飞轮”仍未形成,低成本大规模真机数据的积累尚未实现。在理想状态下,更大规模人形机器人的落地部署能够自然产生更大规模的实机数据,进而反哺机器人大模型的训练,再通过模型能力的提升加速机器人实机的落地应用,形成机器人领域正向循环的“数据飞轮”。然而目前这一“数据飞轮”尚未实现,短期机器人大模型的训练还是对于大规模仿真数据较为依赖,如果能够以更低成本的方式实现更大规模真机数据的收集和积累,能够认为这将对于机器人大模型的训练迭代起到显著的助力。
(4)软件基础设施:仿真与开发平台助力“大小脑”加速迭代
机器人开发平台提供模型训练所需的仿真环境、计算能力与开发工具。为了满足机器人大模型的快速迭代需求,诸多软件厂商也开始提供专用于具身智能领域的基础开发平台,提供涵盖底层算力&云计算、仿真计算能力、开发平台工具以及其他配套基础软件的全栈式解决方案。这使得机器人大模型的开发者能够专注于模型算法的迭代开发而无需在底层基础设施上进行重复建设投入,同时提供软件平台的第三方厂商也能够在具身智能产业链中占据一席之地。
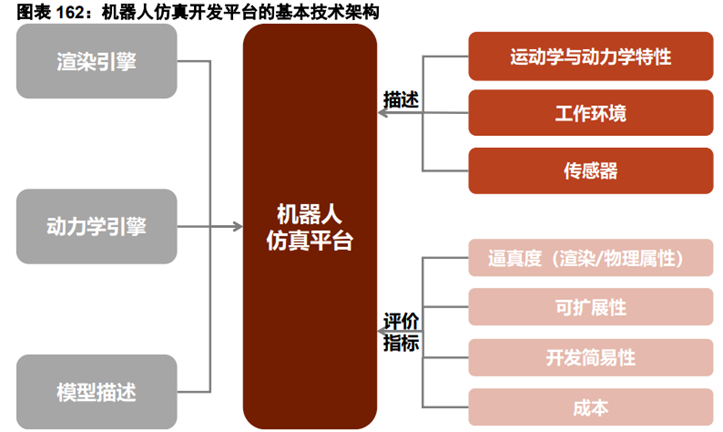
仿真平台:目前机器人大模型训练所需的大规模数据很大程度上都是由仿真平台所生成,再在仿真环境中使用强化学习等方法进行模型训练。而仿真平台的主要功能模块也可分为模型描述、动力学引擎、渲染引擎:模型描述负责机器人模型建模,通过URDF/SDF等计算机语言来向仿真平台描述机器人的动力学和运动学特征;动力学引擎是仿真计算的核心求解器,对于机器人模型建模后形成的微分方程机进行求解;渲染引擎则是最终负责渲染出机器人的三维图形,使得用户可以通过可视化的界面对机器人在仿真环境中的运行进行观察。
开发工具集与代码库:机器人大模型的开发也需要许多共性的工具,同时也有很多可复用调用的AI模型能力,开发平台能够将这些工具集和模型库进行集成,便利开发者在具体项目中的使用。例如开源的ROS框架,其是专为机器人软件开发所设计出来的操作系统架构,为机器人软件开发提供标准化的硬件抽象描述、底层驱动程序管理、程序间消息传递等能力,能够显著提高机器人研发领域的代码复用率。
云计算&边缘计算平台:机器人大模型在云端的训练和推理需要基于成熟的云计算平台,而其在边缘侧的部署也需要配套的边缘计算能力支持,这些底层的计算能力往往不是机器人厂商的擅长领域,而类似于英伟达这样的专业计算厂商也能够提供完整的配套支持。
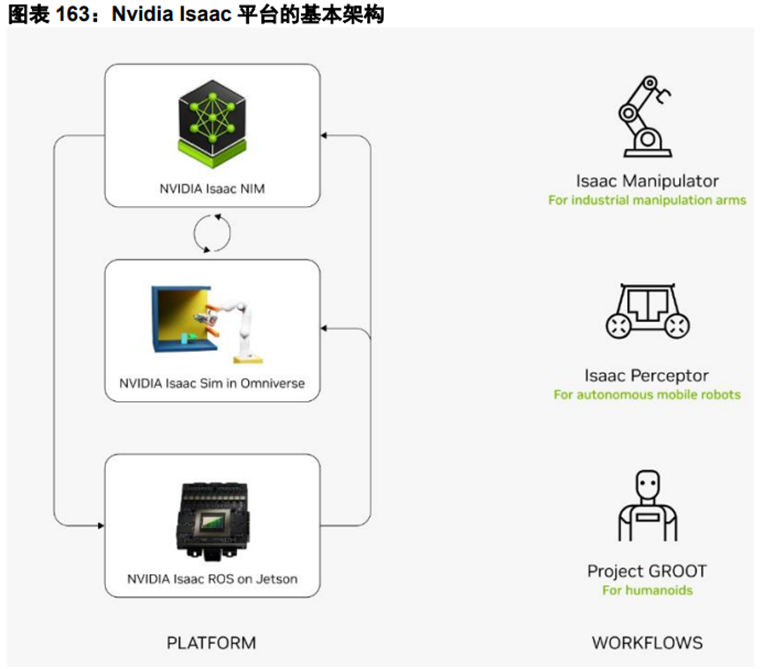
龙头厂商提供一体化方案集成仿真计算能力,英伟达Isaac为其中代表。英伟达Isaac是目前行业中应用最为广泛的机器人模型训练平台之一,Isaac平台的主要模块包括Isaac Sim仿真平台、Isaac NIM模型开发与部署框架、Isaac ROS机器人操作系统等,同时也提供面向人形机器人模型开发的Isaac Groot,面向机械臂开发的Isaac Manipulator,面向AMR机器人开发的Isaac Perceptor等特定方向的集成化开发平台。
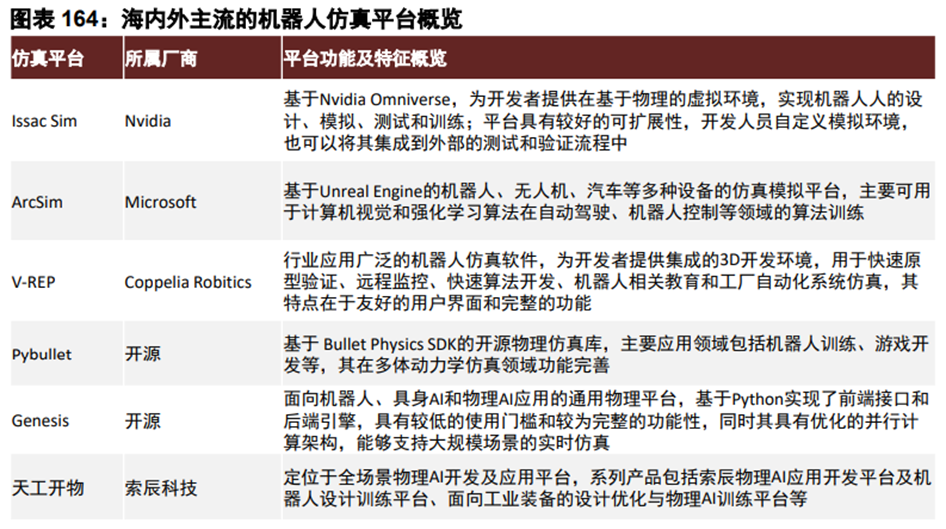
除此之外例如微软推出的AirSim、Unity的ML-Agents等也作为仿真平台在行业中有诸多应用案例;而在国内,索辰科技推出的天工物理AI平台也是定位于面向机器人大模型开发的物理仿真平台,海内外行业探索持续加速。
软件平台公司的长期目标是成为机器人大模型核心基础设施的提供方。以英伟达Isaac为例,其为机器人厂商的提供是从底层计算引擎,到模型及代码库,到仿真计算,再到应用框架的平台级解决方案,同时其也与英伟达Ominiverse数字孪生平台以及Cosmoc物理AI模型紧密结合,其长期的目标是要占据人形机器人“大小脑”训练核心基础设施的生态位,为各大厂商的各类机器人产品提供底层计算能力以及软件基础设施层面的一体化服务。随着未来机器人“大小脑”迭代需求的加速,软件基础设施层面的需求也会持续涌现,为行业中的更多基础软件公司提供切入这一全新产业链的阶段性机遇。
7、轻量化:材料优化势在必行
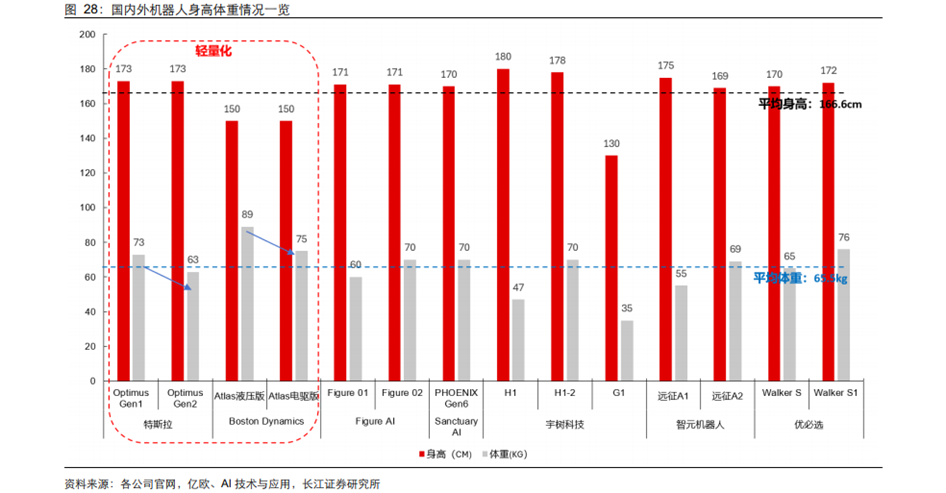
目前国内外人形机器人平均体重为65.5公斤,轻量化能提高机器人的运动和续航能力。在身高方面,人形机器人普遍集中在170cm上下,其中宇树科技的人形机器人H1身高达到180cm。从体重维度来看,除宇树H1和G1外,多数人形机器人的质量都处于60-80公斤区间,如优必选的Walker S1体重为76公斤。整体趋势上,机器人轻量化可提高机器人的运动和续航能力,已成为主要发展方向。
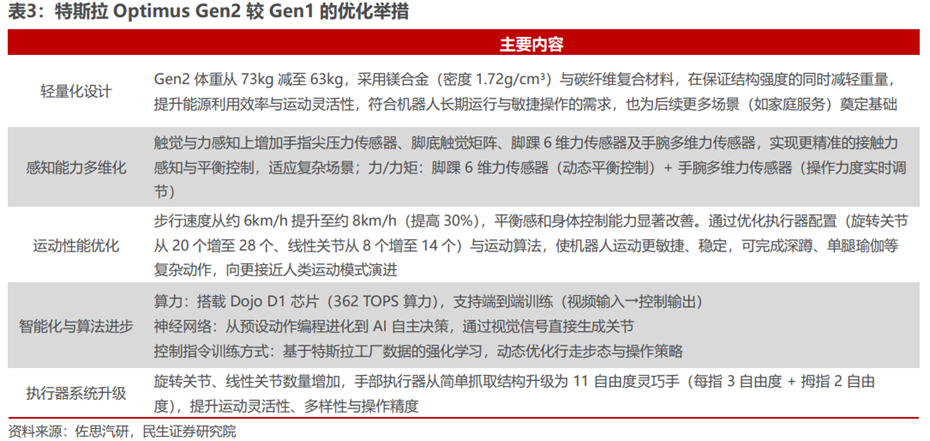
轻量化设计可提高人形机器人的运动效率,使其惯性小、灵活性和敏捷性增强,部件更易驱动和控制,电机转矩密度要求降低,执行复杂动作更流畅精准。如特斯拉OptimusGen-2相比上一代重量减轻10公斤,速度提升30%,平衡和控制能力增强,动作更快。
轻量化设计能提高人形机器人的续航能力,主要通过降低能耗实现。减重可减少运动惯性,降低驱动力需求,减轻驱动系统负担,减少能量消耗。在电池盒体积受限时,提高电池能量密度较难,而减重来降低能耗更具性价比。
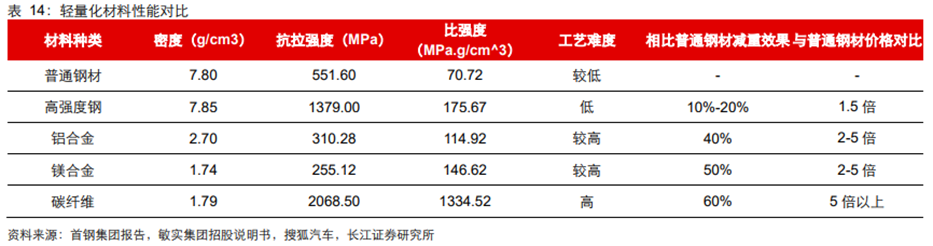
材料优化是人形机器人轻量化主要方式之一,镁铝合金成为理想选择。铝合金、镁合金是工程应用中密度较小的金属结构材料,具有比强度和比刚度高、导热性好、尺寸稳定、减振降噪能力突出、电磁屏蔽性好,以及优异的铸造、焊接、切削加工性能,且易于回收,广泛应用于航空航天、汽车、通信电子和军工等领域;
镁铝合金已在人形机器人领域初步应用。众擎SE01人形机器人其机身采用航空级铝材,通过精密的设计与加工实现了极高的强度和轻量化。在实际应用中,该机身不仅能够承受复杂环境下的机械应力,还通过减轻重量显著提升了整机的灵活性和能效,为机器人在移动、操作任务中提供了卓越的性能支持。日本本田公司第3代的ASIMO便是由轻质合金制成,其外壳就为镁合金材质,这使得机器人的自重大大降低,步行速度由原来的1.6km/h提高到2.5km/h,最大奔跑速度达到了3km/h。
特斯拉人形机器人引入PEEK材料,推动“以塑代钢”技术革新。其Optimus Gen2采用PEEK树脂减重。PEEK是高性能聚合物,具有优异的机械性能、耐高温和化学稳定性,适用于人形机器人制造,可用于:关节与轴承:PEEK的高机械强度、耐磨性、自润滑性及耐高低温性能,使其可用于制造机器人关节轴承和滑动部件,减少摩擦损失,提高使用寿命和运动精度。手臂和末端执行器:PEEK低密度、高强度,可用于制作机器人手臂和末端执行器的结构部件,如手指、夹具和骨架,满足轻量化需求。
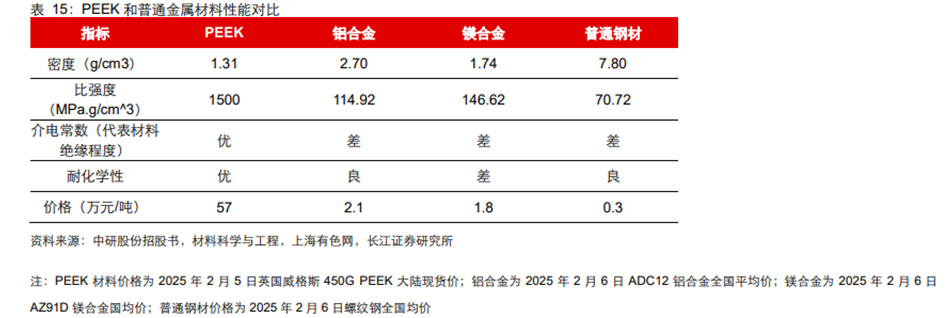
PEEK材料有望用于行星滚柱丝杠制造,满足人形机器人指关节等部位轻量化、耐磨、高强度需求,常州瑞璐塑业已通过精密注塑加工验证,后续将配套用于新一批试验人形机器人机械臂装配。
PEEK在人形机器人减速器领域已发布正式产品。2025年4月10日,科盟创新在上海工业智能中心举办的峰会上发布七款机器人核心传动技术新品,其中PEEK轻量化谐波减速机可实现40%减重、3倍寿命提升、轴向尺寸缩减20%、振动归零误差补偿,适配精密控制场景;PEEK轻量化摆线减速机具有±1.5%低波动率、空间压缩30%、抗冲击能力提升200%,适配紧凑型高负载任务。

除了PEEK材料外,LCP、PPS、PA等塑料材料也在机器人领域逐渐应用。
LCP(液晶聚合物)在机器人的伺服电机连接器和电子元器件中被广泛应用,市场价格一般在每吨4至9万元。
PPS(聚苯硫醚)具有优异的耐温性、电绝缘性和耐磨性,适用于机器人的电气部件和外骨骼,市场价格为每吨5.8万元左右。
PA(聚酰胺)具有良好的机械强度、刚度、硬度、韧性和耐磨性,适用于机器人的各种机械部件,市场价格为每吨1-2万元。
8、人形机器人本体:多元厂商角逐,向轻量化、多维感知与拟人化发展
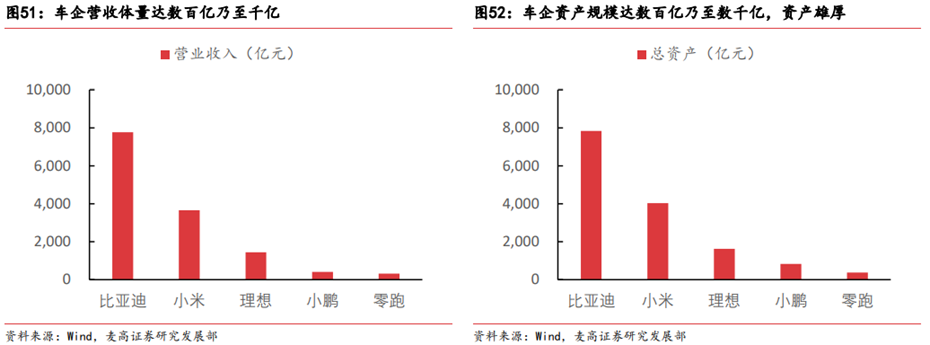
本体厂商不仅限于机器人公司(智元、宇树、Figure等),还包括汽车(特斯拉、比亚迪、小鹏、小米等)、科技互联网(华为、字节、英伟达等)等公司,各自依托自身优势(制造能力、需求场景、大模型能力、控制能力、供应链能力)进行布局,多家公司均已推出相关机器人产品,同时逐步开启量产计划,当前特斯拉、宇树、智元机器人等厂商逐步小批量出货,行业处于产业酝酿发展期。
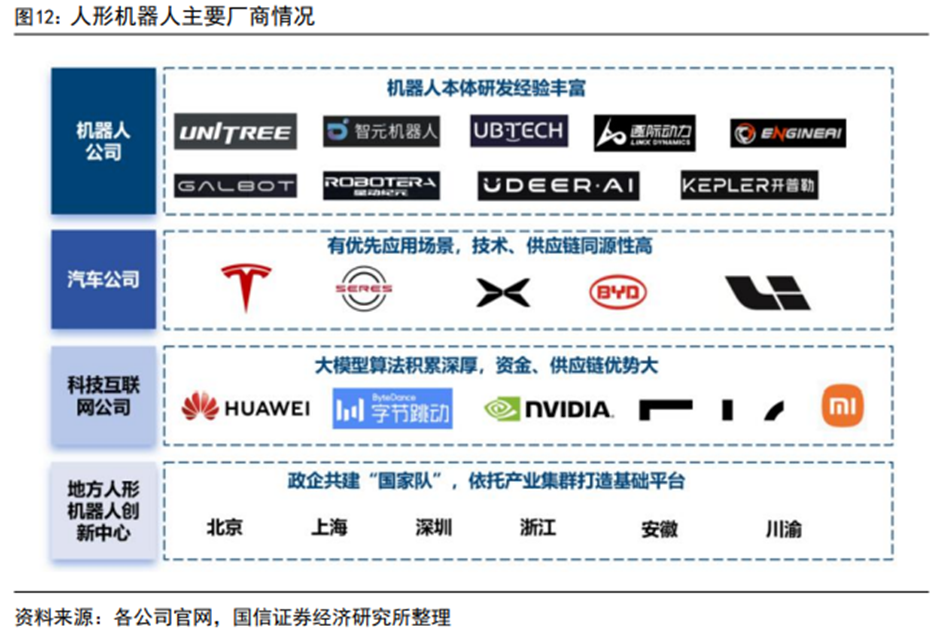
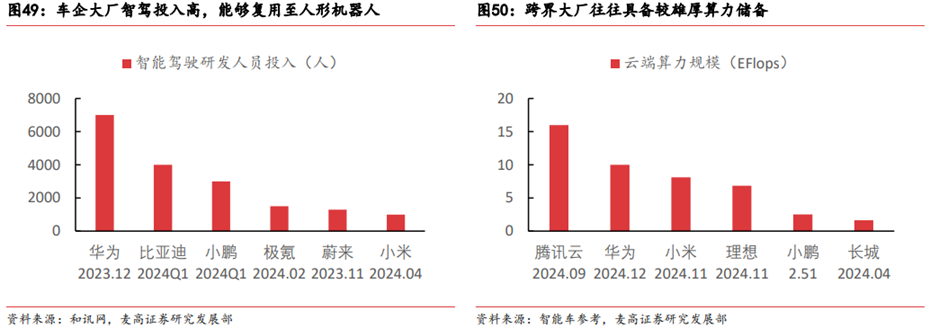
跨界车厂有望在行业成熟期实现后来居上。硬件方面:具备制造业基因的汽车龙头可将电机、传感器等部件供应链复用至人形机器人,依托汽车供应链管理经验迅速实现规模效应,可使人形机器人整机制造成本较初创企业显著降低。软件方面:人形机器人与汽车自动驾驶本质类似,都是“感知 决策 执行”,因此车企的智能驾驶技术可以复用到人形机器人上。未来巨头和初创企业模型差距将随时间呈指数级扩大,初创企业追赶边际成本急剧上升。
与跨界大厂相比,初创公司在经营经验、资本实力等方面处于相对劣势地位。当人形机器人进去规模化量产阶段,机器人本体厂商之间竞争加剧,供应链管理能力、标准化量产能力、降本能力、资本实力、市场开拓能力将成为竞争的核心维度。能够认为初创人形机器人公司需要在产业落地早期迅速在生产制造、市场开拓、人才培养等多个维度建立“护城河”,否则将在人形机器人产业成熟期面临较大的经营风险。
人形机器人本体朝轻量化、感知多维化、运动性能拟人化方向发展:
05
供给链情况
1、T链:2025年有望出货千台预计硬件趋于定型
(1)软件端:运动能力显著提升功能有望快速迭代
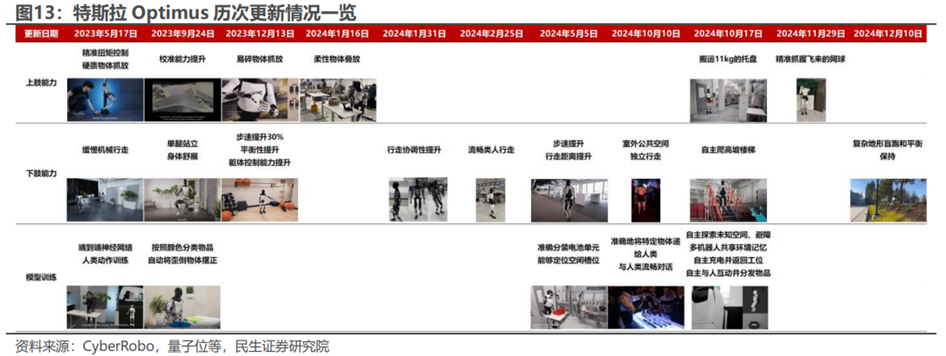
2023年以来,Optimus软件端进展迅猛,运动能力显著提升,功能性有望持续快速迭代:
1)上肢能力:进化主要在2023年,2024年初已经能够实现柔性物体叠放的复杂功能,2024年底进一步迭代重物搬运、运动物体抓握能力;
2)下肢能力:2024年突飞猛进,行走协调性、流畅度大幅提升,已具备类人行走能力,并且能够完成室外行走、自主爬高坡楼梯、复杂地形盲跑和平衡保持等复杂功能,而2023年行走步态还较为机械、行走范围仅限于室内;
3)模型训练:2024年成效显著,Optimus可用功能丰富度提升明显,2024年已经具备电池单元精确分类、未知空间自主探索与避障、自主充电并返回工位、与人类流畅对话并精确分发物品等一系列能力,而2023年端到端神经网络训练刚刚开始,仅实现了根据颜色分类物品等基础能力。
展望2025年:1)Optimus运动能力有望进一步提升,崎岖地形步态、速度方向响应、跌倒爬起能力将持续迭代,不断接近人类能力;2)Optimus功能性有望不断趋于完善,在特斯拉强大算力储备加持之下,Optimus有望能够执行更多有用任务。
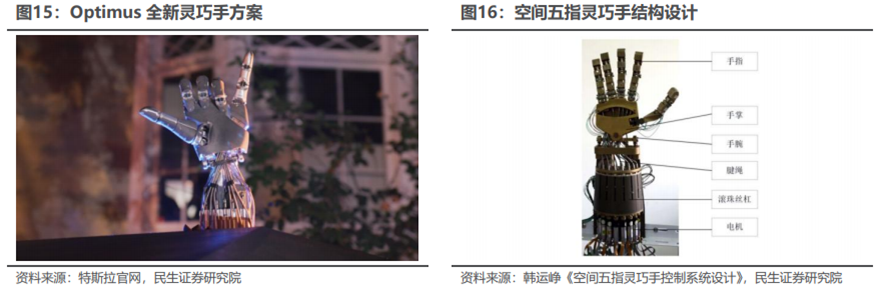
(2)硬件端:方案趋于锁定灵巧手/轻量化为优化方向
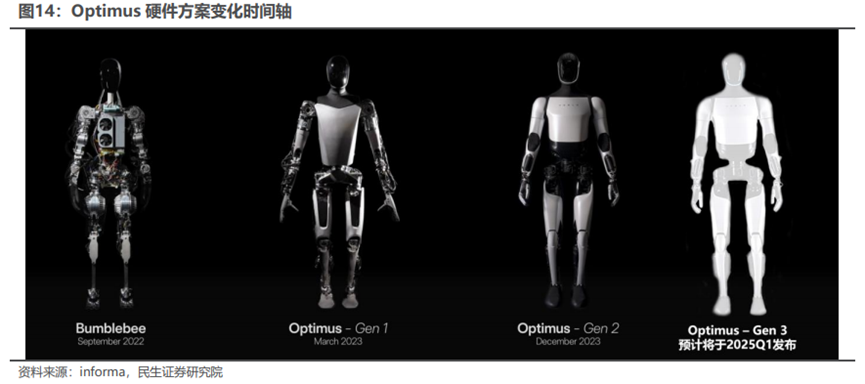
Optimus研发进展迅猛,预计Optimus Gen3有望于2025Q1发布。特斯拉Optimus研发进展迅猛,持续超市场预期:1)2021年8月,在特斯拉首届AI Day上,马斯克发布了人形机器人概念机TeslaBot,并宣布将于2022年推出人形机器人原型机;2)2022年9月,在特斯拉第二届AIDay上,人形机器人Optimus正式推出,已经能够完成搬运货物、给植物浇水和移动金属棒等工作,但行走还不稳定;3)2023年12月,Tesla Optimus官方推特发布视频,第二代Optimus首次亮相,外观发生较大变化,行走速度、柔顺性、平稳性、操控性能大幅提升。马斯克表示,2025年Optimus产量将为千台级别。随着量产时间渐行渐进,预计Optimus硬件方案将趋于锁定,产业链供应关系有望进一步明确。
全新灵巧手拥有22个自由度,微型丝杠 腱绳或为传动方案。Optimus副总裁Milan Kovac表示,全新灵巧手手部有22个自由度,手腕/前臂有3个,年底前新灵巧手仍需进行改进,方向包括扩展触觉传感集成(比之前的双手覆盖面积更大)、通过肌腱进行非常精细的控制、减轻前臂重量等。Optimus新灵巧手具体传动方案尚未公开,参考外观类似的灵巧手方案,预计Optimus新灵巧手采用微型丝杠 腱绳进行传动,由微电机进行驱动。
轻量化可大幅优化人形机器人性能。2023年12月,Optimus Gen2发布,与上一代相比重量减轻10kg,特斯拉尚未其公开轻量化技术方案。
据前文,Optimus已在弗里蒙特工厂搭建试生产线,计划2025年试生产5000台,主要用于内部物流与制造环节。2026年产能目标提升至5万台,并逐步拓展至家庭服务与特殊环境作业。马斯克预估Optimus量产之后售价在2-3万美元。随着人形机器人持续放量、规模效应不断提升,相关零部件价格将逐步降低,同时市场空间将持续放量。
2、H链:具身智能创新中心启动发力关键根技术
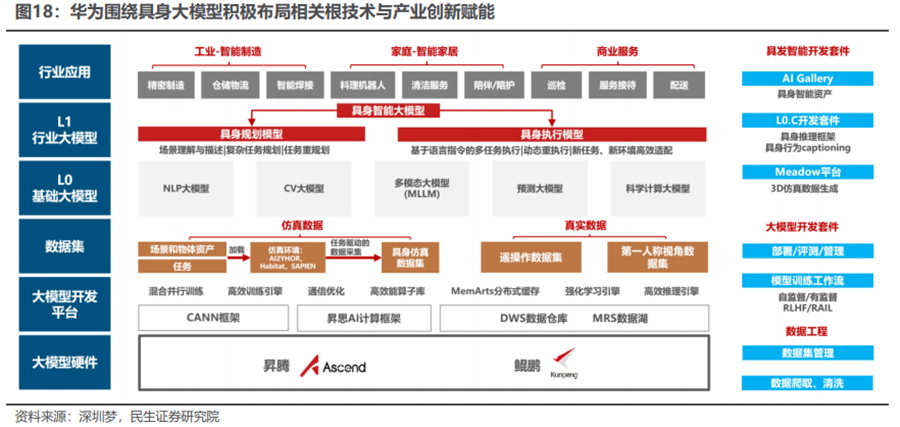
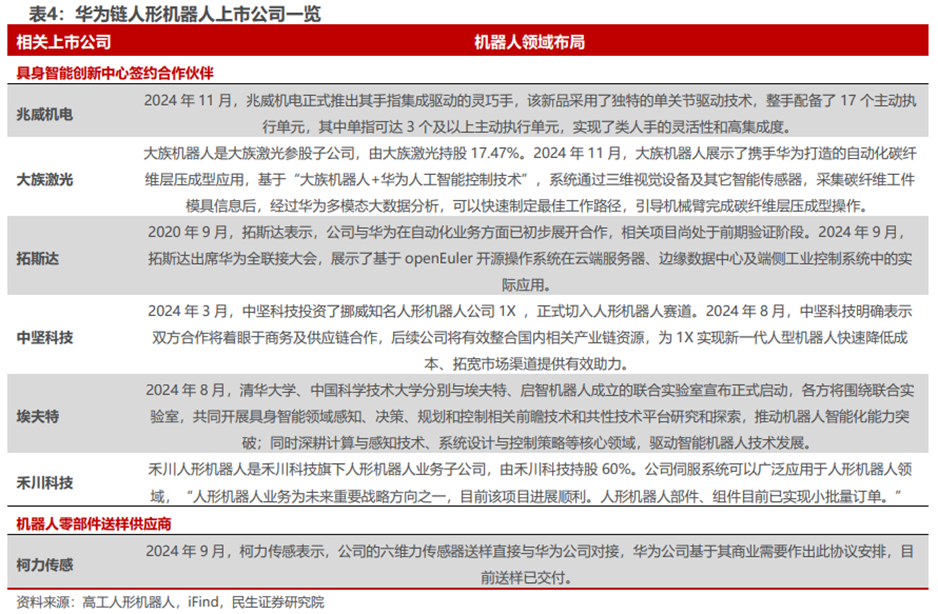
华为具身智能创新中心启动,与16家企业签署战略合作备忘录。华为在人形机器人领域的布局始于2022年4月,华为与达闼机器人签署合作协议,开展多模态大模型开发、机器人创新应用领域全方位合作。2024年3月,华为(深圳)全球具身智能产业创新中心签约,并于2024年11月宣布正式启动运营。该中心由华为与深圳前海合作区管理局共同合作建立,致力于瞄准国际前沿技术,以产业示范应用场景为牵引,开展技术攻关和联合创新,共同打造世界级具身智能产业创新中心。会上,华为与乐聚机器人、大族机器人、拓斯达、中坚科技、中软国际、禾川人形机器人、兆威机电等16家企业签署了战略合作备忘录。
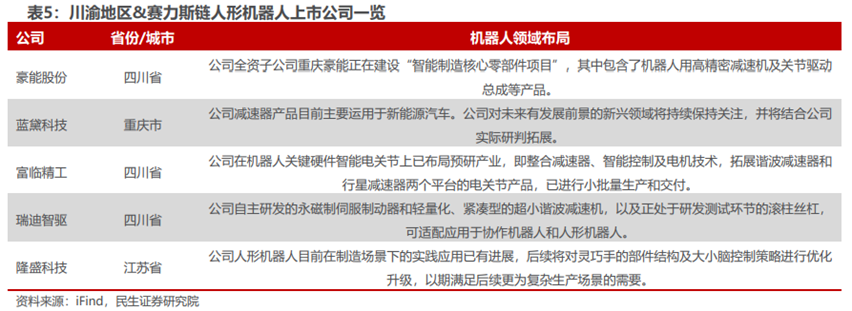
华为将整合具身智能相关能力,共同建设具身智能大脑、小脑、工具链等关键根技术。华为相关负责人介绍,华为布局具身智能已多年,围绕具身大模型积极布局相关根技术与产业创新赋能,并已与超百家企业共同搭建了具身智能生态圈。华为将整合其各部门的具身智能相关能力,共同建设具身智能大脑、小脑、工具链等关键根技术:
1)基础投入:在基础投入方面,具身智能根技术实验室将为创新中心提供共性技术底座,确保各项研发工作的顺利进行。大脑根技术研发及产品化将涉及具身智能大模型、多模态大模型以及算力等多个方面,这些技术的突破将为具身智能的应用提供强有力的支撑。而小脑关键技术的研发,则包括柔性自动化装配、柔性自动化测试、多机器人协同制造以及通用双臂精细制造等,这些技术的实现将进一步推动制造业的智能化升级;
2)联创项目:除了基础技术的研发,创新中心还将开启联创项目,通过华为赋能具身智能技术,联合本体厂商及制造企业共同解决企业技术难题,打造解决企业实际问题的具身明星产品,以提升企业的技术水平和市场竞争力,推动具身智能技术在更广泛领域的应用和落地;
赛力斯自2024年8月起开始布局人形机器人领域,在重庆招聘具身智能控制工程师、嵌入式软件开发工程师等多个相关岗位。但公司在2024年11月4日澄清,并未与任何伙伴联合开展人形机器人方面的合作。
华为系标的主要包括具身智能创新中心签约合作伙伴、机器人零部件送样供应商两类;赛力斯链标的主要为川渝地区机器人相关企业。
3、NV链:三大平台全面布局提供全面支持框架
英伟达提出机器人三大计算平台协同解决方案,形成从训练到优化再到执行的完整体系。在CES2025主题演讲中,英伟达CEO黄仁勋提出,每家机器人公司最终都必须构建三台基础计算机协同的解决方案,包括DGX、Omniverse with Cosmos以及AGX,以形成从训练到优化再到执行的完整体系。其中:1)DGX系统:用于在数据中心训练基于AI的堆栈;2)Omniverse with Cosmos,即数字孪生系统(Digital Twin):用于仿真和合成数据的生成,将经过训练的人工智能进一步实践完善;3)AGX系统:端侧计算平台,用于处理实时传感器数据,可以部署在汽车、机器人、AMR或任何其他设备中。
英伟达携手众多合作伙伴,共建机器人生态系统,合作方涵盖解决方案与服务供应商、AI视觉公司、机器人操作系统公司、机器人传感器制造商、人形机器人主机厂等多个领域。

Cosmos定位为物理AI的世界基础模型,基于海量真实数据训练,可生成逼真合成数据,助力开发者加速机器人与自动驾驶模型开发。Cosmos的首批用户包括1X、Agile Robots、Agility、FigureAI、Foretellix、Fourier、Galbot、Hillbot,、IntBot、Neura Robotics、SkildAI、Virtual Incision、Waabi和小鹏汽车等领先机器人和汽车公司,以及共享出行巨头Uber。
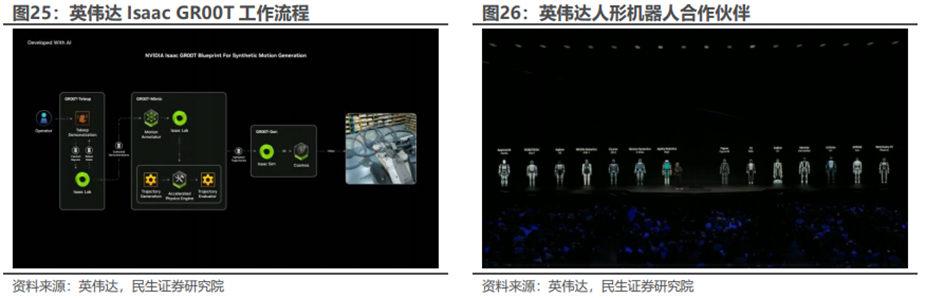
英伟达基于Cosmos推出的IsaacGR00T,通过捕捉少量人类动作并生成海量合成运动数据,加速人形机器人训练。其Blueprint工作流程包括:通过GR00T-Teleop工作流,借助Apple Vision Pro在数字孪生环境中捕捉人类动作作为金标准;将捕捉到的人类示范扩展成更大的合成运动数据集;GR00T-Mimic工作流会将捕捉到的人类示范扩展成更大的合成运动数据集。最后,基于Omniverse和Cosmos平台构建的GR00T-Gen工作流,通过域随机化和3D提升技术指数级扩增数据集,最终在Isaac Lab中教会机器人高效安全地移动和互动。
全新打造Jetson Thor芯片,为人形机器人产业合作伙伴构建全方位开发平台。Jetson Thor内置单芯片和新一代Blackwell GPU架构,性能、功耗等明显优化,带宽达到100GB/s,AI计算性能达到800TFLOPs。作为新型计算平台,Jetson Thor能够执行复杂的任务,并与人和机器安全自然地进行交互,具有针对性能、功率和尺寸进行优化的模块化架构,可为GR00T等通用基础模型提供强大运行支持,大幅提升开发者工作效率。
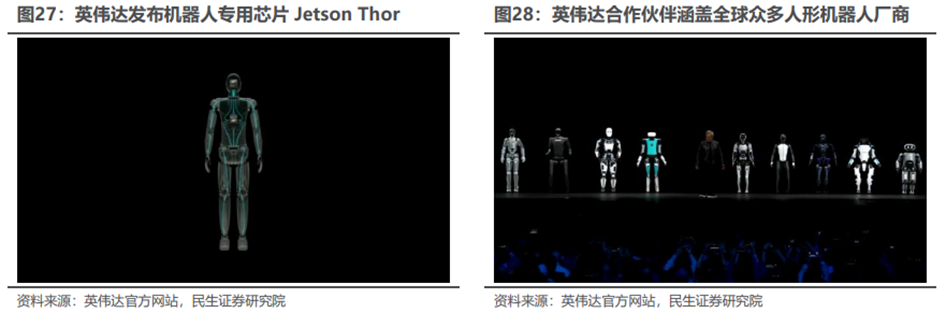
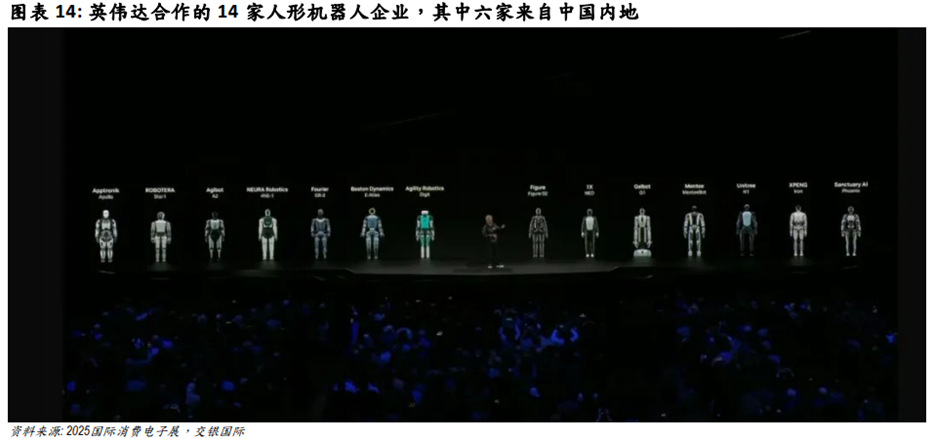
英伟达人形机器人合作伙伴中,中国企业占比近半。在CES2025英伟达创始人兼CEO黄仁勋主题演讲上,共有14款人形机器人亮相,其中6款为中国企业产品,占比达43%,包括星动纪元的Star1机器人、智元机器人的远征A2机器人、傅利叶的GR-2机器人、银河通用的G1机器人、宇树的H1机器人、小鹏的Iron机器人等。

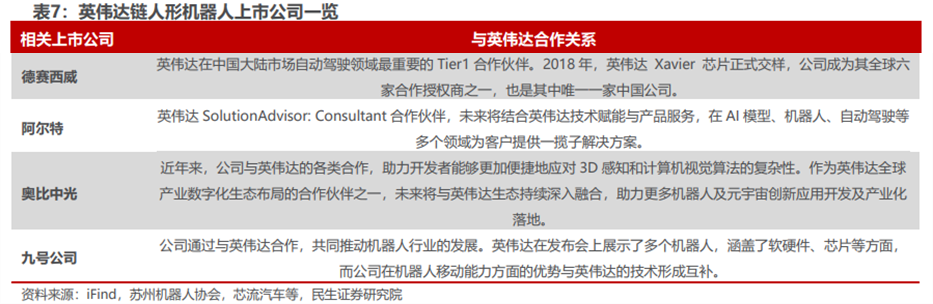
NV系标的主要包括与英伟达在其他领域有合作的公司。
06
相关公司
1、宇树科技
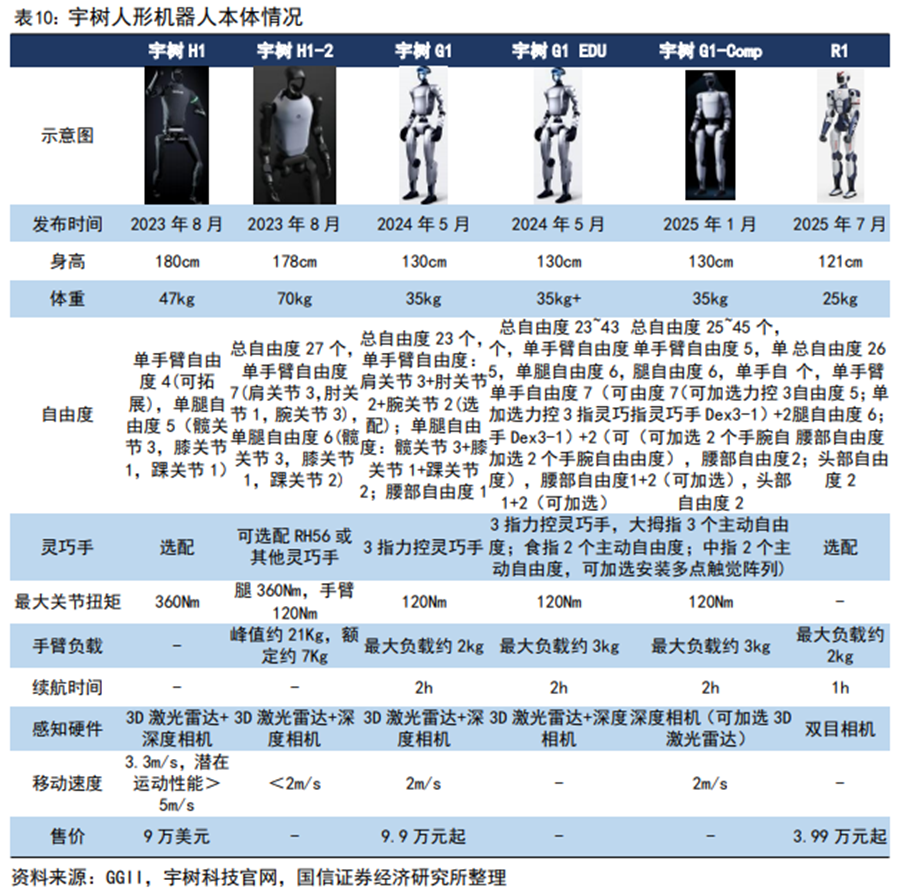
宇树科技的产品线主要包括四足和人形机器人。宇树科技由王兴兴创立于2016年8月,总部浙江杭州,是全球最早实现四足机器人商业化的公司之一。2025年6月,宇树科技完成股改,名称由杭州宇树科技有限公司变为杭州宇树科技股份有限公司。在四足领域推出A1、A2、Laikago、Go1、Go2等产品,2023年7月发布Unitree Go2四足机器人,起售价9997元,11月发布专为工业场景设计的四足机器人——Unitree B2,应用于电力巡检等各类工业、特种救援场景;人形方面研发H1全尺寸人形机器人和G1高自由度高性价比人形机器人。

2023年,全球四足机器人销量3.4万台,宇树以69.8%的份额居全球首位。内资厂商在消费和行业级市场领先,国际企业在高端行业级应用领域优势显著。2023年,人工智能大模型突破推动人形机器人发展,宇树也进军该领域,凭借积累具备较强人形本体制造能力。2023年8月,宇树发布首款双足机器人Unitree H1,售价9万美元。2025年春晚,16台H1亮相,靠AI训练执行激光SLAM定位,全自动走位变队形,涉及多种技术。2024年5月,宇树发布G1,起售价9.9万元人民币,价格较H1下降超80%,拥有23 - 43个关节自由度,有力控灵巧手,分G1和G1 EDU两种型号,后者提供不同模块方案搭配,在算力、自由度、承载力等方面较优。宇树自研自产G1关节模组,有3种类别,带双编码器的行星减速器关节模组最大瞬时扭矩140Nm。2025年1月,宇树发布首个人形机器人应用方案G1 - Comp,能在足球场奔跑、转身、转圈,基于Yolo11网络算法实现球场环境快速识别、精准定位,续航约2小时。2025年7月,宇树发布新款机器人R1,拥有26个自由度,售价3.99万元人民币,集成语音和图像多模态大模型。
量产方面,2024年8月份宇树宣布G1可大规模量产。基于端到端深度强化学习和仿真训练的技术路线,G1可快速升级迭代。2025年7月,宇树科技和智元机器人在中移(杭州)信息技术有限公司2025年至2027年人形双足机器人代工服务采购项目中中标。本次采购的项目总预算为1.2405亿元(含税)。采购包1为全尺寸人形双足机器人,预算为7800万元(含税),最终中选人为智元机器人;采购包2为小尺寸人形双足机器人、算力背包、五指灵巧手,预算为4605万元(含税),中标人为宇树科技。
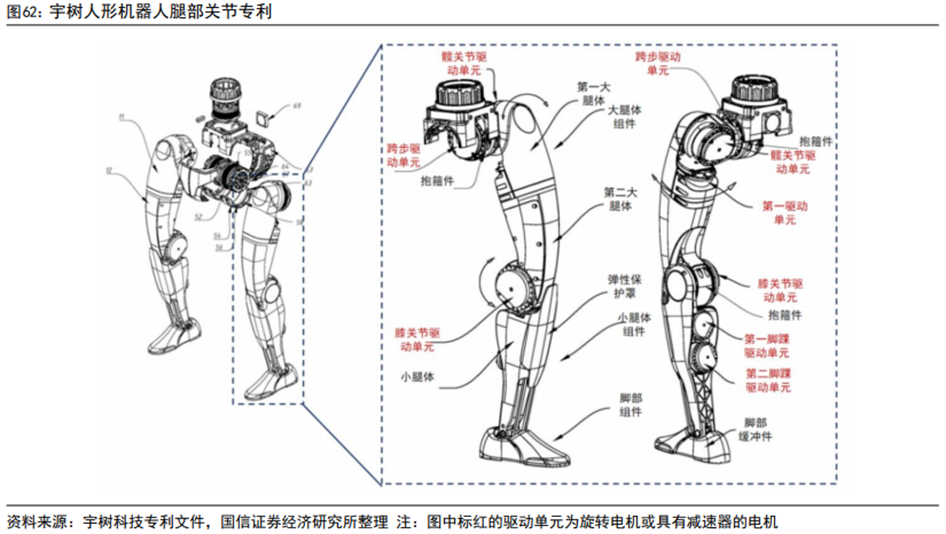
在关节方案选择方面,根据宇树科技的专利,宇树人形机器人目前主要采用驱动电机 减速器的旋转关节方案。根据宇树专利,第一大腿杆上部设有髋关节电机及减速器单元,以驱动第一大腿杆左右摆动进而带动整个腿部动力结构左右摆动。第一大腿杆和第二大腿杆之间有第一电机及减速器单元,实现第一大腿杆与第二大腿杆相对周向转动;大腿杆组件与小腿杆组件之间设有膝关节电机及减速器单元,以驱动大腿和小腿杆组件相对前后摆动;小腿杆上设有脚踝电机及减速器单元,输出端设有依次连接的摇臂和连杆,连杆与脚部支撑件连接,以带动脚部支撑件作上下、左右方向的摆动。
2、智元机器人
智元机器人成立于2023年2月,创始团队包括“稚晖君”彭志辉在内的多位业内资深人士,背景综合互补,具有深厚的核心技术背景、产业管理经验和产业资源,已完成多轮融资。2025年7月,智元机器人收购上市公司上纬新材63.62%股份,股权交易完成后,上纬新材控股股东将变更为智元机器人及其管理团队共同持股的主体,实际控制人将变更为邓泰华,核心团队包括稚晖君等。
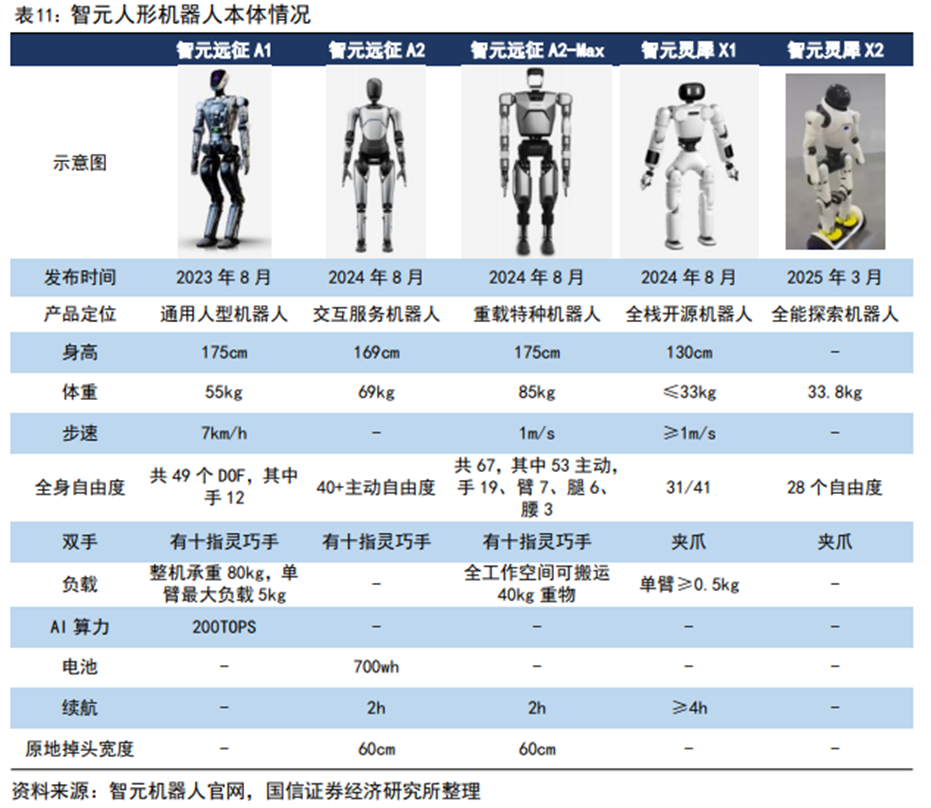
机器人产品方面,2023年8月智元发布第一代通用型具身智能机器人原型机远征A1,2024年8月智元机器人发布“远征”与“灵犀”两大家族共计五款商用人形机器人新品:远征A2、远征A2-W、远征A2-Max、灵犀X1及灵犀X1-W。24年10月智元机器人开源智元灵犀X1的软硬件全套图纸和代码,进一步推动技术的共享与进步。25年3月发布搭载情感计算引擎的双足智能交互人形机器人灵犀X2,具备完善的运动、交互及作业能力。2025年6月3日,智元携手百事中国发布品牌首个人形机器人“百事蓝宝”,未来将在百事品牌营销、线下体验、数字社交等场景创造更多价值。
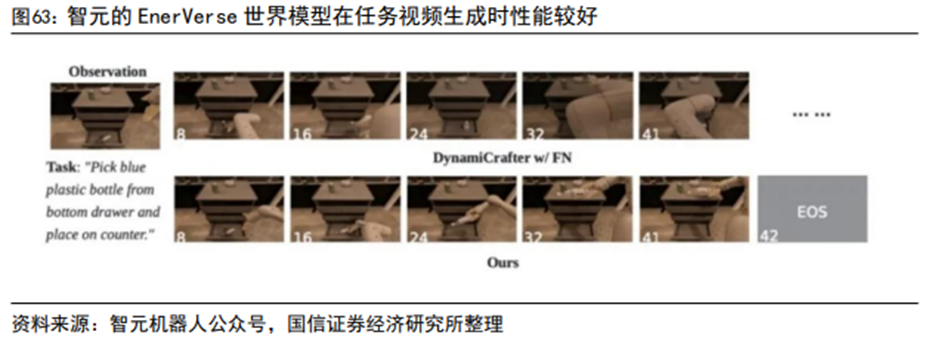
在大模型方面,智元远征A2在人机交互、规划决策、运动控制等核心能力储备丰富。人机交互上,A2基于语音大模型、超拟人合成技术、全双工对话能力、端侧模型部署,实现实时对话;基于多模态大模型,多通道信息处理能力让人机交互更轻松舒适;规划决策上,基于语言大模型 RAG(Retrieval-Augmented Generation)构建企业定制业务知识库,支持精准营销话术、业务咨询与引导、展项讲解,让信息传递更加高效直观。配合RTMOF(Real-TimeRobust Motion Framework)非线性模型预测控制和强化学习算法,及高效动态规划引擎,能快速生成全局最优轨迹,不断优化运动策略,抗干扰能力强,在不确定环境中行走敏捷可靠、灵活自如。运动控制上,基于动作大模型(ActionGPT),A2可根据人语音指令和意图动态生成上百种仿人自然动作并执行轻作业任务。此外A2基于HIMUS(High-performance Multimodal Mapping System)3D-SLAM算法、VectorFlux规控算法,低延迟低漂移性能,支持在复杂多变动态环境中实现L4级别自主移动。数据生成上,智元发布全球首个机器人4D世界模型,让机器人在任务指引和实时观测的基础上规划未来动作;2025年1月8日,智元机器人发布全球首个机器人4D世界模型,针对人形机器人的模态对齐和数据稀缺两大关键问题,提出EnerVerse架构,通过自回归扩散模型,在生成未来具身空间的同时引导机器人完成复杂任务,在提升4D生成能力的同时,实现动作规划性能的显著突破。世界模型上,2025年5月,智元机器人开源发布全球首个基于机器人动作序列驱动的具身世界模型EVAC(EnerVerse-AC),以及具身世界模型评测基准EWMBench,在世界模型架构EnerVerse基础上推出创新成果:基于动作序列驱动的世界模型EVAC与具身世界模型评测榜单EWMBench,构建从训练到评测全链路技术闭环,重新定义具身智能研发范式。
在硬件方面,智元A2实现高可靠、轻量化、超高槽满率绕线工艺的量产自研一体化关节,最高峰值扭矩430Nm,电机扭矩密度50Nm/kg,动态性能佳,关节可靠支持长时间稳定行走。360°激光雷达 6颗高清摄像头融合感知,实现全景无盲区;结合开集语义信息支持动静态语义环境与目标同步构建,实现智能避障。
2025年3月10日,智元发布首个通用具身基座模型——智元启元大模型(GenieOperator-1),开创性地提出Vision-Language-Latent-Action(ViLLA)架构,该架构由VLM(多模态大模型) MoE(混合专家)组成,其中VLM借助海量互联网图文数据获得通用场景感知和语言理解能力,MoE中的Latent Planner(隐式规划器)借助大量跨本体和人类操作视频数据获得通用的动作理解能力,MoE中的ActionExpert(动作专家)借助百万真机数据获得精细的动作执行能力,三者环环相扣,实现了可以利用人类视频学习,完成小样本快速泛化,降低具身智能门槛,并成功部署到智元多款机器人本体,持续进化,将具身智能推上新台阶。

智元机器人在3月11日发布搭载情感计算引擎的双足智能交互人形机器人灵犀X2具备完善的运动、交互及作业能力:
运动结构方面,灵犀X2采用柔性外壳,拥有28个自由度,无并联结构,配备小脑控制器、域控、智能电源管理系统和关节模组等核心组件,实现运控算法突破。结合深度强化学习和模仿学习,可完成走路、奔跑、踩滑板车、玩平衡车、骑自行车等高难度动作。
交互能力方面,灵犀X2搭载VLM多模态交互大模型,可实现毫秒级交互反应,精准判断人类情感状态并回应。同时集成动作模态,能模仿呼吸韵律、“暗中观察”及做出细小动作和肢体语言,增强情绪表达能力。
作业能力方面,灵犀X2基于智元启元大模型,具备简单任务中的零样本泛化能力,可多机协作,应用于保安、保姆、保洁及教育、医疗等领域。其采用轻量化、模块化设计,拥有二次开发接口和一站式方案,方便用户为康养、服务、家庭陪伴等场景定制应用。
量产方面,2025年1月,智元机器人第1000台通用具身机器人下线,包括731台双足人形机器人(远征A2/灵犀X1)和269台轮式机器人。4月,均胜电子与智元成立合资公司,计划年产1000台机器人。5月,灵犀X2开启商业化,预计2025年下半年规模出货,2026年底出货量达“大几千台”。7月,智元和宇树中标中移信息技术公司人形双足机器人代工项目,总预算1.2405亿元,智元中标全尺寸机器人项目,预算7800万元;宇树中标小尺寸机器人及相关产品项目,预算4605万元。
在关节方案选择方面,旋转关节和直线关节能力兼具。根据智元相关专利,智元机器人在机械臂上采用丝杠的直线关节方案,在轮足机器人的腿部结构上也采用丝杠的直线关节方案。根据智元机械臂专利,机械臂第一线性执行器包括第一丝杠,其中有螺接配合的第一螺杆和第一螺母,第一驱动件能够带动第一螺杆转动,以带动第一螺母移动;根据智元轮足机器人专利,轮足机器人的腿部结构中,第一连接组件和第二连接组件均可分别包括丝杆和丝杆螺母,丝杆的一端连接第一关节件或第二关节件,丝杆的另一端与轮足机构连接,丝杆螺母设在丝杆上,丝杆与丝杆螺母相配合,以驱动轮足机构在轮式模式或足式模式之间可切换。
3、优必选
优必选是人形机器人早期行业老兵,人形机器人产品包括Walker、Walker X、Walker S等系列。优必选成立于2012年,2014年成功研发并生产首款小型人形机器人Alpha,2017年发布商用服务机器人产品及解决方案。2018年发布第一代人形机器人Walker后,优必选对人形机器人不断迭代,2019年发布第二代Walker机器人,2023年12月发布Walker S,2024年发布人形机器人Walker S1,2025年7月发布最新一代人形机器人Walker S2。
2024年10月,优必选推出Walker S1人形机器人,配备自主研发的语义VSLAM导航技术和第三代仿人灵巧手,可负重15公斤行走,满足工业搬运需求。该机器人还搭载多模态规划大模型、语义VSLAM、学习型运动控制等技术,具备智能决策和灵活运动能力,适应工业场景泛化应用。Walker S系列已获车厂500台意向订单,预计2025年订单量达1000-2000台。2025年7月,优必选推出Walker S2,全球首款自主换电人形机器人,自由度52个,行走速度2m/s。

2025年4月,优必选牵头的首批人形机器人系列国家标准正式获批立项。在TC591秘书处单位北京机械工业自动化研究所有限公司统筹下,优必选联合北京人形机器人创新中心有限公司、上海人工智能实验室等单位共同发起了该系列国标,主导制定作业操作技术要求,规范灵巧操作、腿部移动作业等多项作业操作技术,涵盖环境感知、决策规划等多技术要求。
落地方面,2024年,优必选宣布与蔚来、东风柳汽、一汽大众、极氪、一汽红旗、比亚迪、北汽等车企合作,人形机器人进厂执行搬运、质检、装配等任务。2025年1月,其工业人形机器人Walker S1在比亚迪汽车工厂第一阶段实训取得初步成效,效率提升一倍,稳定性提升30%,预计2025Q2具备规模化交付条件。实训中,Walker S1解决了视觉定位、运控算法和关节散热等挑战。2025年3月,优必选在极氪实现全球首例多台人形机器人协同实训。2025年4月,优必选签订大型人形机器人采购合同,产品用于汽车生产制造和商用接待。2025年5月,优必选与华为签署全面合作协议,双方在具身智能和人形机器人领域开展创新合作,加速人形机器人在多场景的落地应用。
3月12日,优必选联合北京人形机器人创新中心发布全尺寸科研教育人形机器人天工行者,售价29.9万元,已开放预订,第二季度开始交付。该机器人身高170cm,全身20个自由度,能以10km/h速度奔跑,可在复杂地形运动,搭载“慧思开物”平台,为高校和科研机构提供研究解决方案。其关键部位采用超大扭矩密度设计及航空铝材等,保证轻量化与高性能。关节模组可拓展至550TOPS算力,风道散热设计保障关键部件长时间高性能运行。主体可自由拓展,可装配深度相机、激光雷达、NVIDIA Orin算力板、六维力传感器、七自由度协作双臂、五指灵巧手等人形机器人核心零部件。同时天工行者完整开放底层电机接口、传感器接口及运动控制接口,配套成熟的开发指南与示例代码,能够充分满足科研用户的二次开发需求。

4、鸣志电器
深耕运动控制领域近30年,国内空心杯电机供应商。鸣志电器是运动控制领域的领先供应商,主营产品为步进电机、伺服电机、空心杯电机、直流无刷电机、智能照明等。公司成立于1994年,于2017年登陆上交所主板,通过收购AMP、LIN、常州运控、TMotion,完善全球化的产业布局,产品广泛运用于工业自动化、通信、安防、汽车工业、航空航天、消费等领域。
国内空心杯电机稀缺标的,产品丰富种类齐全。空心杯电机因体积小、高转速、大力矩等优良特性,是人形机器人“灵巧手”的核心部件。公司在空心杯电机领域具备先发优势,在无刷空心杯电机及有刷空心杯电机(无刷电机)的产品矩阵较为全面,覆盖不同机座尺寸、转速、功率,且可以搭载不同型号的编码器、减速机等产品,能够满足客户的定制化需求服务,未来有望受益于人形机器人放量。

公司发布2025年半年度公告,2025H1实现营收13.15亿,同比 3.92%;实现归母净利润0.27亿,同比-32.66%;实现扣非归母净利润0.23亿,同比-37.28%。据此计算,2025Q2实现营收7.19亿,同比 9.56%;实现归母净利润0.20亿,同比-41.07%;实现扣非归母净利润0.18亿,同比-46.64%。
5、昊志机电
公司业务品类众多,具备自主创新能力。广州昊志机电股份有限公司成立于2006年,专业从事中高端数控机床、机器人、新能源汽车等核心功能部件研发与制造的高新技术企业。2016年在创业板上市,公司在电主轴领域处于全球市场前列。公司立足电主轴行业,并向数控机床和工业机器人等高端装备的核心功能部件领域横向扩张,产品涵盖电主轴、刀具、数控转台、直线电机、谐波减速器、数控系统、伺服电机、驱动器、传感器、燃料电池压缩机、曝气鼓风机、直驱类高速风机等数十个系列上百种产品。
技术积累深厚,逐步实现机器人核心零部件实现国产化。公司的谐波减速器、机器人关节模组、末端执行机构(气动手指和快换模块)等产品能够满足协作机器人、轻型机器人生产的模块化、标准化、小型化要求,有望受益于《机器人 应用实施方案的落地》,凭借在机器人领域深厚的技术积累,有望逐步实现智能机器人核心功能部件的全国产化。

公司2025年第一季度净利润维持正增长。2024年公司实现营业收入13.07亿元,同比 37.8%;实现归母净利润0.83亿元,同比 369.9%。2025年第一季度实现营业收入2.87亿元,同比 11.0%;实现归母净利润0.16亿元,同比 6.9%。
6、柯力传感
主攻称重传感器,机器人传感器核心供应商。柯力总部设于浙江宁波,采用集团化管理模式,在深圳、广州、福州、郑州、苏州、池州等城市投资27家控股公司和11家参股公司。拥有两大研发中心、三大投资中心、三大产业园、七大生产基地,并建有包括研发、业务、供应链、投资、人力资源、信息化、智能制造等在内的集团八大赋能中心。围绕“客户、战略、人才、流程”建设KMS集团管理体系。围绕“产业投资化 产业园区化 产业集团化 产业生态化 产业资本化”发展战略途径,搭建传感器行业生态体系,立志成为国内多种传感器融合领军企业,砥砺奋进于全球机器人全身传感器核心供应商行列。
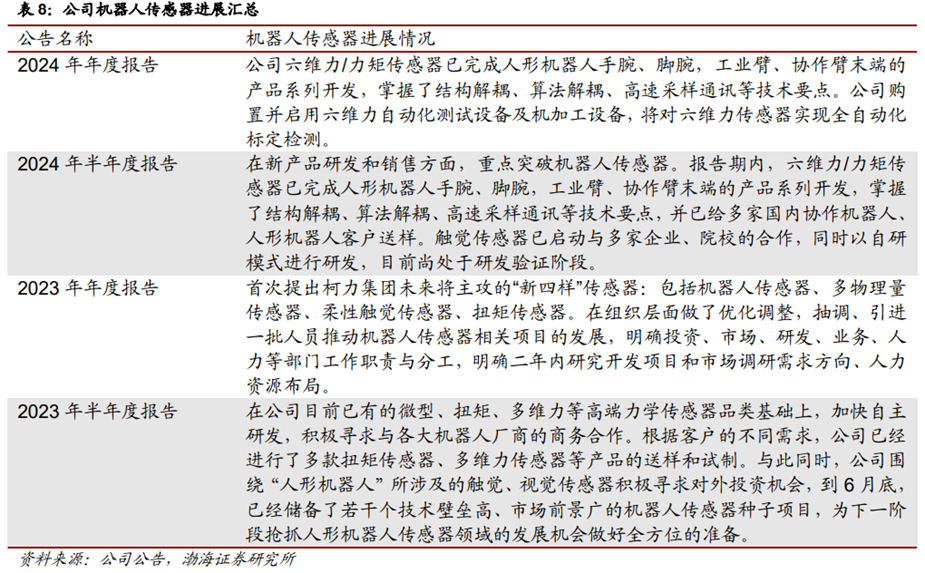
面对新趋势、新产业、新机遇,公司坚持“以市场为师”,围绕六维力传感器、机器人关节力/力矩传感器、触觉传感器、多物理量传感器方向全面推进“新四样”传感器发展。根据公司2024年报披露,报告期公司六维力/力矩传感器已完成人形机器人手腕、脚腕,工业臂、协作臂末端的产品系列开发,掌握了结构解耦、算法解耦、高速采样通讯等技术要点,并已给50多家国内人形机器人、协作机器人、工业机器人客户送样,部分客户已进入批量订单阶段。2025年4月,公司购置并启用六维力自动化测试设备及机加工设备,将对六维力传感器实现全自动化标定检测,有助于提高产品精度、稳定性和可靠性,并将大幅提高公司生产六维力传感器的效率和产能。此外,公司在触觉传感器研发方面启动与多家企业、院校的合作,并以投资并购的方式探索与国内技术领先的创新性触觉传感器公司在股权方面的合作。根据公司公众号披露,近日公司完成了猿声科技的战略投资,实现多维触觉传感和电子皮肤方向的重要布局,机器人传感器产品线进一步拓展。
公司公告2025年半年度报告,25H1实现营业收入6.85亿元,同比增长23.40%;实现归母净利润1.73亿元,同比增长47.93%,基本每股收益0.61元。
7、丰立智能
小模数齿轮领先供应商,稳定供应全球电动工具头部企业。公司从事小模数齿轮、齿轮箱以及相关精密机械件等产品研发、生产与销售,主要产品包括钢齿轮、齿轮箱及零部件、精宿机械件、粉末冶金制品以及气动工具等,广泛应用于电动工具、农林机械、医疗器械、智能家居、特高压电网、工业缝纫机等领城。
深耕精密减速器,进军人形机器人业务。在人形机器人领域,丰立智能以行星减速器、谐波减速器为核心,为进军人形机器人打下技术基础。行星减速器深耕多年,主要为博世供应;公司自研的谐波减速器经过十年技术储备,于2024年下半年实现量产,核心生产设备来自日本进口,确保产品一致性与精密性。此外,与清华大学孵化的星动纪元合作开发的灵巧手微型减速器,已进入小批量生产阶段。产业化方面,公司入选“2024人形机器人供应链优质企业”,并与多家客户完成小批量订单交付,未来将重点布局人形机器人关节模组的规模化应用。随着人形机器人量产加速,公司技术储备与产能弹性有望扩展市场空间。
2024年公司实现营业收入5.05亿元,同比 17.2%;实现归母净利润0.17亿元,同比-46.6%。2025年第一季度公司实现营业收入1.17亿元,同比 18.2%,公司实现归母净利润为0.03亿元,同比-36.0%。
07
市场规模分析
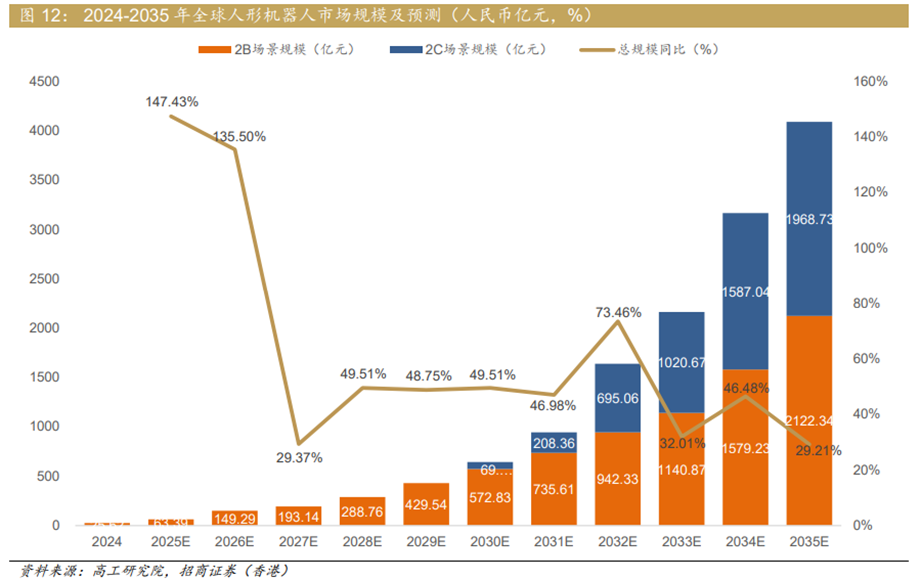
根据GGII预测,2025年全球人形机器人市场销量有望达到1.24万台,市场规模63.39亿元;2030年销量将接近34万台,市场规模超640亿元;2035年销量将超500万台,市场规模超4,000亿元。
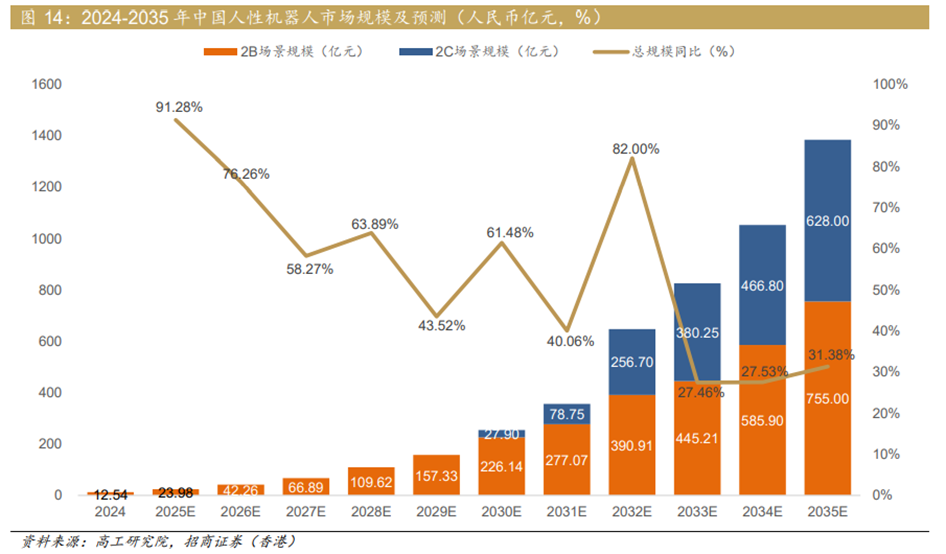
中国市场方面,2025年销量预计达7,300台,市场规模近24亿元;2030年销量达16.25万台,市场规模超250亿元。预计2031年人形机器人进入快速起量期,2035年销量有望达200万台,中国市场规模有望接近1,400亿元。
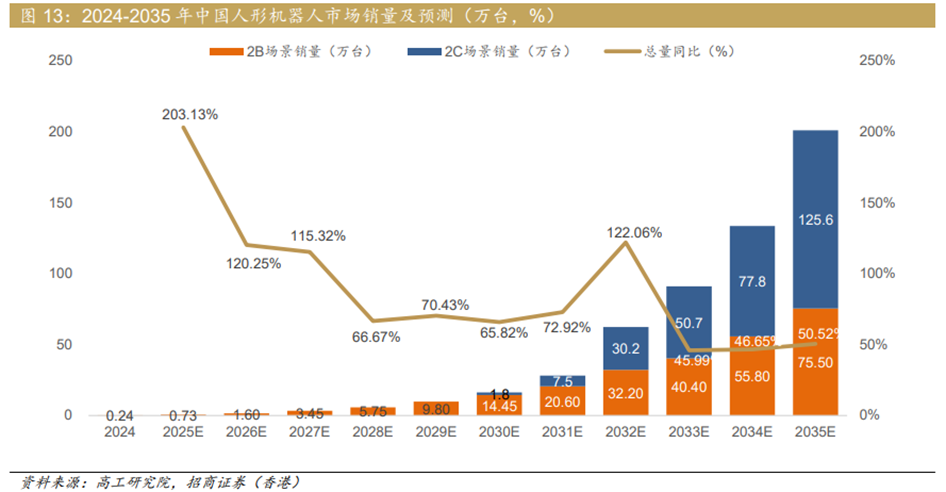
目前,国内人形机器人厂商如宇树科技、优必选、傅利叶、众擎机器人、智元机器人等已实现产品出货,主要面向科研机构和开发者。预计商用服务、生产制造、巡检等TOB结构化场景将是人形机器人率先落地应用的领域,到2030年,TO-C领域的人形机器人才会迎来落地,并迅速攀升销量,2033年有望反超TO-B领域。2025年,人形机器人产业正处于从实验室技术成就迈向商业化落地的关键阶段,有望开启万亿级市场。
08
参考研报
1.首创证券-机械设备行业深度报告:人形机器人商业化进程开始启动
2.民生证券-人形机器人行业系列深度报告一:智能具身,创启未来纪元
3.麦高证券-人形机器人行业深度报告:人形机器人迎量产元年,国产厂商有望超车
4.长江证券-人形机器人行业系列深度(十四):技术持续迭代,变革孕育新机
5.国信证券-汽车行业人形机器人系列专题之本体:AI技术革命,车企转型具身智能
6.东海证券-机械行业:人形机器人从概念到量产,核心零部件机遇梳理
7.招商证券(香港)-全球人工智能/机器人行业:通用机器人迭代加快,专业机器人率先突破
8.交银国际-人形机器人行业系列(1):产业跃迁,政策驱动、技术拐点与场景革命的三重共振
9.西部证券-人形机器人行业专题报告:人形机器人赛道深度之运动控制,制约商业化落地进程的关键环节

 VIP复盘网
VIP复盘网
