

在辅助驾驶行业快速从L2 向L3高阶演进的大背景下,行业对于核心技术的底层支撑能力提出了前所未有的严苛要求。
导航定位就像辅助驾驶系统的“眼睛”与“基准”,它能不能一直稳定工作、定位准不准、靠不靠谱,直接决定了辅助驾驶用着安不安全、顺不顺畅,也影响了我们对这个功能的信任度。
尤其是在城市NOA大规模落地、L3高阶演进、辅助驾驶功能加速出海等背景下,传统GNSS定位方案在复杂遮挡和电磁环境下可靠性、可信性、连续性等方面的短板日趋凸显。比如在复杂环境下容易受干扰、连续飞点、启动慢等。
《高工智能汽车》了解到,城市NOA场景对定位的连续性、可靠性提出了更高的需求,而GNSS定位遇到高架桥、高楼、林荫等环境下容易造成GNSS信号遮挡,叠加电离层干扰、车内车外电磁干扰等影响,GNSS往往存在不定位、飞点等问题。因此,各大车企普遍采用IMU、GNSS、RTK、SLAM等多种技术融合方案。
眼下,辅助驾驶正在加速迈入L3时代,车辆对于导航定位的要求更高了——不仅要更连续、更可靠,还得更可信,在任何复杂场景下都能持续输出高可靠的定位信息。同时,辅助驾驶行业竞争已经从“有没有这个功能”转向“用着舒不舒服”,域控集成化的发展趋势,定位方案的综合性能成为了车企核心考量指标。
华测导航(股票代码:300627)凭借在导航定位领域22年的深耕与技术积累,基于“自研StellaX芯片的A720 GNSS模组 CI-111高性能IMU模组 PointX全球星地一体增强服务”,推出了“云芯一体,卫惯融合”的全栈式定位解决方案。
据了解,该方案在国内外高速与城市场景进行了大量的、广泛的系统化实测,无论是精度、稳定性、环境适应性,还是抗干扰能力、冷启与恢复能力等核心性能上均具备领先优势,可以为主机厂的L3落地、域控集成、出海合规提供全方位支撑。
伴随着NOA领航辅助驾驶的规模化普及,车载高精度定位市场彻底火了起来。
高工智能汽车研究院监测数据显示,2025年1-10月,中国市场乘用车(不含进出口)搭载高精度定位车型交付量达到422万辆,同比增长181%,渗透率上升至22%。
与此同时,辅助驾驶向L3进阶的速度越来越快,定位技术革新已经势在必行。一方面,L3对定位系统的安全性与可靠性要求到了极致。GNSS信号从数万公里外的卫星抵达地面时已极其微弱,很容易被车载电子设备的电磁泄漏干扰,甚至被“车载GPS干扰器”、信号欺骗设备这类专业设备恶意攻击,导致定位偏移、无法定位、错误轨迹等问题,严重的还会威胁行车安全。
另一方面,现在高阶辅助驾驶行业比拼的是“体验感”,大家都希望NOA功能“上车即能用”,不用等。然而,GNSS定位依赖于接收卫星星历,导致传统GNSS模组首次启动往往需要30s;若车辆启动环境存在树木、楼宇等遮挡则需要更长的时间,根本满足不了大家对辅助驾驶功能快速启动的需求。
针对上述系列痛点,华测导航自主研发了射频基带一体化的高性能GNSS SoC芯片StellaX,集成了1380个卫星信号跟踪通道 512个抗干扰专用通道,以及双核处理器。依托于StellaX强大的全频点、高精度信号跟踪能力和澎湃算力,华测导航创新性地构建了“干扰宙斯盾”抗干扰体系。
据了解,干扰宙斯盾是⼀套从智能感知到动态抑制的全链路抗干扰闭环解决方案,在各种复杂、恶劣的干扰环境下,依然可以精准识别全类型干扰信号,并进行实时预警和自适应抑制,有效破解了传统GNSS定位的应用瓶颈。
基于StellaX芯片,华测导航面向乘用车辅助驾驶场景开发了A720 GNSS模组,集成了行业领先的CTCLIB算法引擎,支持SPP、NRTK、PPP-RTK、PPP和GNSS/INS紧组合解算功能。该模组已在上海、深圳、重庆、武汉、保定、北京等城市完成全场景实车测试,在复杂遮挡环境表现出连续性好、可靠性高和恢复定位快等特点。
据华测导航相关负责人介绍,A720 GNSS模组首次定位仅需要13s,大幅提升了启动效率,A720还具备强大的干扰与欺骗检测告警和抑制能力,即便是在充电桩扫频干扰、车载干扰器恶意干扰等典型场景,A720不仅能够准确地检测到干扰并告警,而且仍然能够稳定的输出连续、准确的定位信息,精准匹配了NOA体验升级以及L3对于定位安全性、可靠性的严苛要求。
抗干扰测试:干扰告警,更可靠、更安全
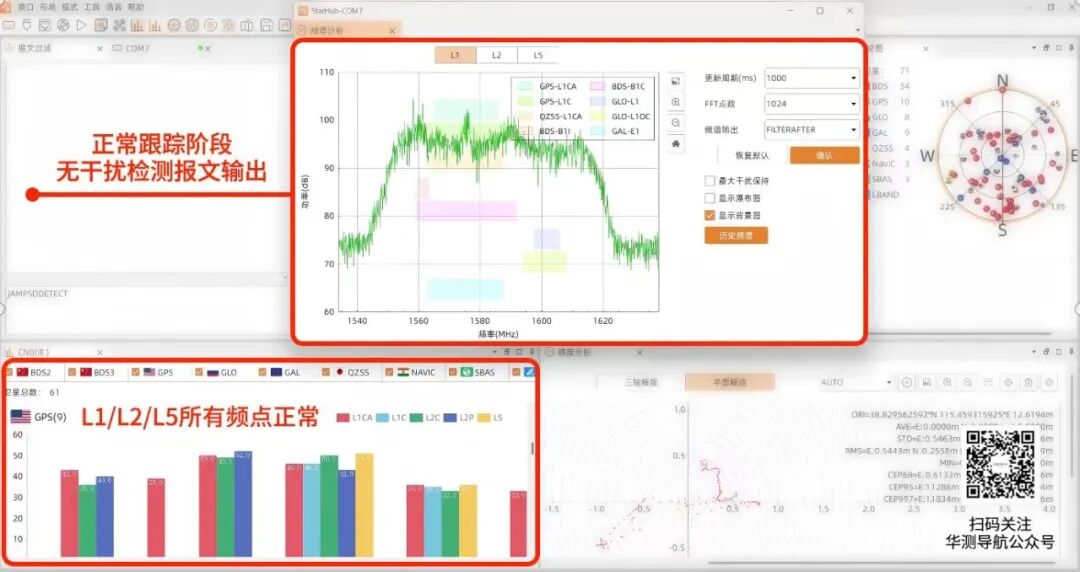
使用车载“点烟器式”GPS干扰器进行抗干扰测试,在A720正常运行过程中,开启干扰器,A720能够实时输出干扰检测报文,并准确地识别出干扰的类型、作用的频点和干扰型号的强度,为下游应用提供了可靠性的先验信息。
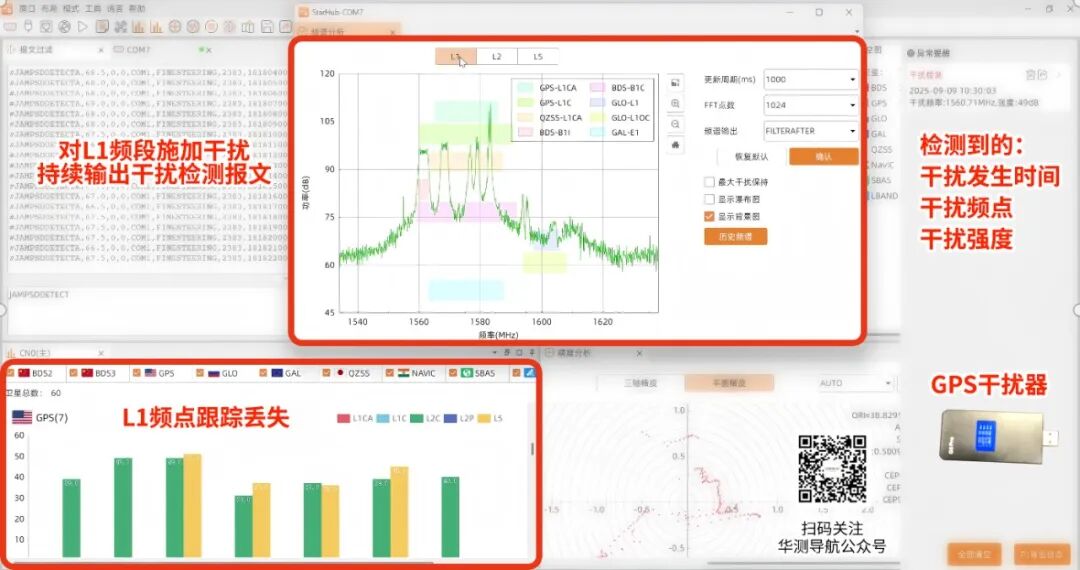
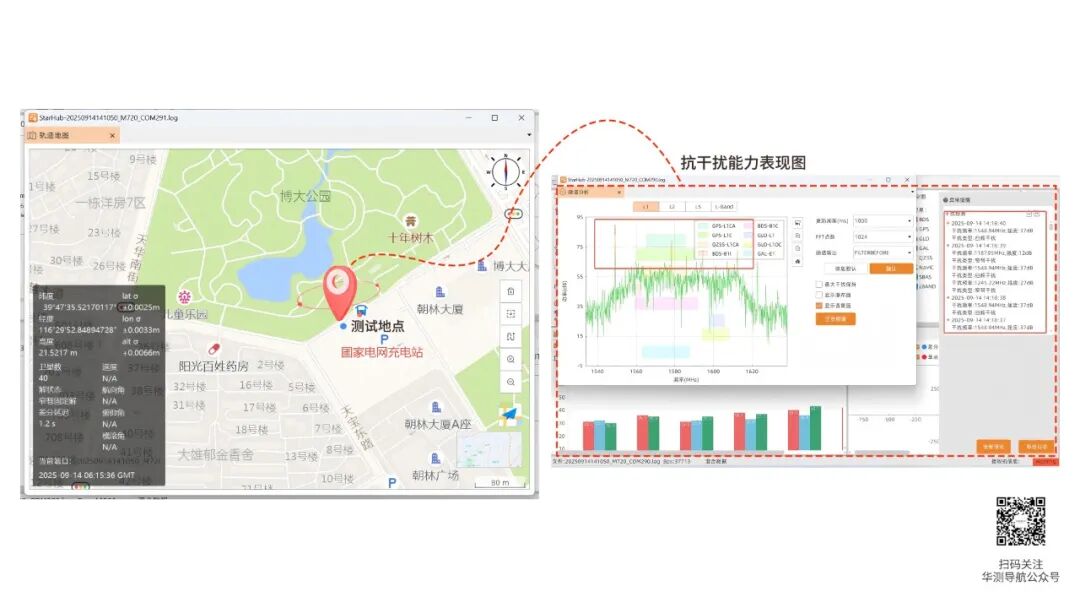
客户反馈的充电桩实际干扰场景测试,A720准确识别出了扫频干扰类型和干扰强度,并在此干扰场景下保持了固定解状态,且轨迹连续、精度正常,表现出了强大的抗干扰能力。
冷启与恢复测试:更快、更连续
沿着上海黄浦江的所有隧道测试了A720出隧道恢复定位的时长和恢复固定的时长,A720可以实现平均3秒恢复定位、10秒恢复固定,且表现稳定。



另外,欧盟UN171法规的落地明确了辅助驾驶的认证标准,加速了全球辅助驾驶市场的出海进程,而符合当地法规的高精度位置增强服务成为出海企业的核心诉求。华测导航 PointX 全球星地一体增强服务,依托全球10,000 基准站的强大基础设施,已实现全球重点区域的全覆盖,可以为辅助驾驶出海提供合规、稳定的技术支撑。

2025年9月,华测导航在欧洲进行了为期60天、跨越13国、总里程超过2万公里的大规模路测,实测数据显示:A720 PointX 方案在欧洲高速公路与城市道路场景中,平面精度优于20cm@CEP95,固定率最高达97.9%,充分验证了方案在欧洲复杂路况与法规环境下的稳定性和适应性。

据了解,PointX 服务采用全链路自研架构,7×24 小时稳定运行,全球可用性>99.99%,同时坚持数据本地化与合规运营,为企业辅助驾驶出海扫清了位置服务障碍。

目前,国内主机厂的NOA功能普遍采用了高精度定位 辅助驾驶地图 车端传感器的多源融合定位策略。其中,核心的高精定位模块基本都是IMU GNSS RTK的方案,并且大多数来自多供应商产品组合模式。
这种多供应商组合的模式,长期使用中的弊端日益凸显:融合效率低、设备兼容性差、功能安全风险高,再加上集成适配、后期维护等隐性成本持续叠加,已经无法满足主机厂“降本增效”的需求。
更关键的是,随着整车电子电气架构向“中央计算 区域控制”升级,主机厂的核心诉求已转向“简化集成流程、降低开发成本、提升系统稳定性”,一套“模组 算法 服务”一体化的全栈解决方案成为行业刚需。
在这种背景下,华测导航“云芯一体,卫惯融合”的全栈式导航定位方案的核心优势愈发凸显。这套方案构建了“芯片-模组-算法-服务”全链路自研的闭环体系,从根源上解决了分散式方案的协同难题,同时实现了流程简化与成本优化的双重目标。
一方面,核心硬件与算法的深度耦合大幅降低集成门槛。华测导航A720 GNSS模组内置全套自研核心算法,主机厂无需额外集成第三方SDK或投入资源自研算法,直接规避了“只集成硬件却难以实现稳定定位”的行业弯路。正如行业人士所言:“早期,部分车企认为集成硬件模组即可实现定位功能,但实际落地后才发现,算法才是高精定位的核心竞争力。”

另一方面,硬件预适配进一步缩短开发周期。华测导航的CI-111高性能IMU模组与A720模组已完成预适配,主机厂无需额外开展兼容性调试工作,直接减少了跨设备适配的繁琐流程,显著缩短集成周期。
据相关负责人介绍,华测导航PointX重点布局海外市场,已实现欧美、日韩、中东等全球主要经济区域的全覆盖,可以为主机厂NOA功能出海扫清定位服务的地域障碍。
值得注意的是,华测导航的全栈方案兼顾标准化与个性化,可以为车企提供灵活的合作选择:车企既可选择“A720 GNSS模组 CI-111高性能IMU模组 PointX增强服务”的全栈方案,实现“一站式交付”;也可根据自身项目需求,单独采购A720 GNSS模组或CI-111高性能IMU模组。

这种灵活的模块化组合模式,能够适配不同车企在不同项目阶段的个性化需求,无论是全新车型的全栈布局,还是现有产品的升级迭代,都能提供精准匹配的解决方案。

 VIP复盘网
VIP复盘网
