

对于扫地机器人来说,一道门槛往往比一张复杂的客厅地图更难。
导航算法可以识别家具轮廓、绕开拖鞋和数据线,但只要地面出现几厘米的高度差,机器往往就只能在原地反复试探,最后选择绕路。于是很多家庭的清洁地图里,总会有几个被标记出来的「禁区」。
AWE 2026 的石头展台上,这个常见的困境被重新摆在了机器面前:一段 4.5 厘米的门槛,再加上一条 4.3 厘米的台阶
石头 G30S Pro 在障碍前短暂停顿。随后机身前端抬起,仿生关节伸缩摆动,驱动轮同步升起,整机像一辆越野车一样调整姿态,极具机械美感地、平稳地翻越了障碍。
这就是石头新一代全能旗舰扫地机器人 G30S Pro 在 AWE 2026 现场的实机演示
纵观扫地机器人发展的十年,行业的技术演进几乎一直被困在「二维平面」里。厂商们内卷吸力参数与算法避障,机器人也越来越聪明,但只要遇到几厘米的高门槛、低矮的沙发底,机器依然会停在边界之外,这些问题仍然是困扰用户的最原始痛点。
与此同时,行业数据也在发生变化。当前 5000 元以上高端扫地机市场增速已经高达 65%。这意味着消费者的核心关注点,正在从单纯的「性能参数」,转向对真实家庭场景中的清洁体验。
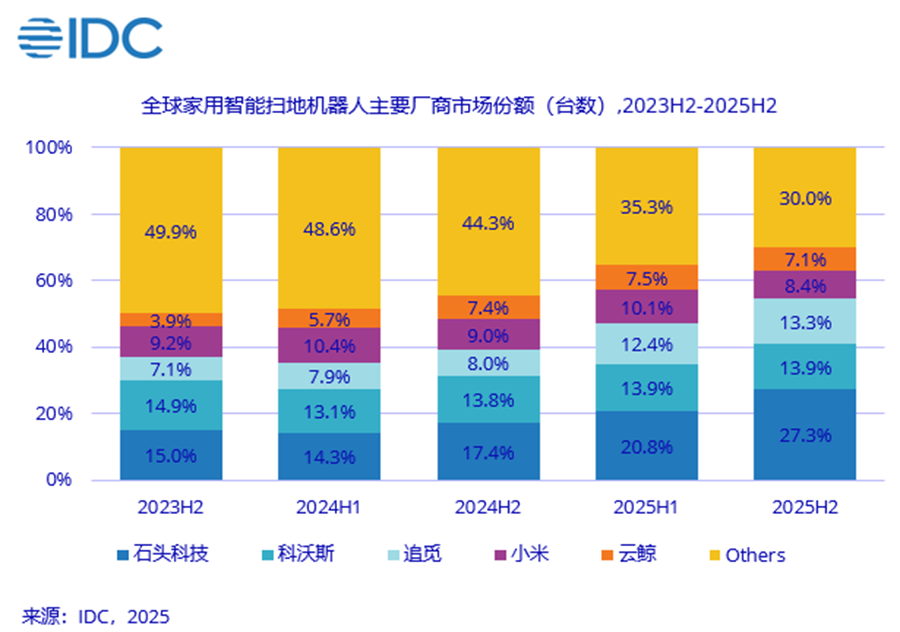
作为 2025 年扫地机器人销量与销额全球双第一的品牌,石头科技在 AWE 展出的 G30S Pro,实质上是对这一行业痛点的回应。
这台产品试图打破扫地机器人长期以来的「平面滑行」逻辑,让机器开始具备真正的三维空间运动能力,从而面对更复杂的家庭物理地形。
它搭载的底盘升降 3.0 AI 轮足系统,让扫地机第一次开始具备类似「姿态控制」的能力。它不再是被动适应平面环境的清扫工具,而是能够根据前方环境开始主动感知、判断、处理三维空间中复杂的物理障碍。
从行业技术路径来看,这可能是扫地机器人行业十年来最重要的一次底盘结构进化。
01
从拖布抬升到姿态控制:
底盘技术的三次跃迁
要理解 G30S Pro 的变化,先要理解一个长期困扰扫地机器人的问题:它们在家庭里行动的方式,其实一直很受限。
过去十年,扫地机器人的进化主要集中在吸力、导航和避障算法上。但在底盘结构这个最基础的层面,行业很长时间里都停留在一种「被动适应」的逻辑:机器依靠固定高度的底盘在地面移动,一旦遇到门槛、滑轨或厚地毯,就只能靠动力硬冲或者绕开。在早期的底盘 1.0 时代,大多数扫地机器人的越障能力大约停留在 2cm 左右。这意味着许多中国家庭常见的推拉门滑轨、浴室隔水条,都会成为清洁路径上的「天然边界」。
石头在这一阶段推出了 底盘升降 1.0 方案,让机器在需要时抬高底盘,将越障能力提升到约 4cm。这是第一次突破了扫地机器人长期以来的高度限制。
次年,石头将这一方案升级为底盘升降 2.0,底盘开始支持动态调节高度,升级为「无极动态升降」。机器可以根据地面的具体情况实时调节清洁高度,拖布模块则会同步上抬至安全高度,能完美兼容 3cm 的中长毛地毯,避免湿拖布触碰。
但随着扫地机器人在家庭中的进一步普及,用户对清洁覆盖率的要求也在不断提高,复杂地形的越障能力再次成为关注的重点,仅靠单一方向的高度抬升,已经很难继续提升家庭复杂环境的通过能力。
G30S Pro 的出现,正是石头在这一技术路径上的第三次结构升级。在底盘升降 3.0 AI 轮足系统中,石头重新设计了整套底盘结构,引入全新的 AI 轮足系统,在底盘结构中引入了仿生关节与 360°摆臂结构,让驱动轮、万向轮以及底盘高度都可以独立动作,扫地机开始像一个小型机器人一样,可以通过调整身体姿态跨越障碍。
这让扫地机器人第一次拥有了「运动能力」。

 VIP复盘网
VIP复盘网
