

——车企技术同源/工业场景优势明显,感知与灵巧手互动物理世界
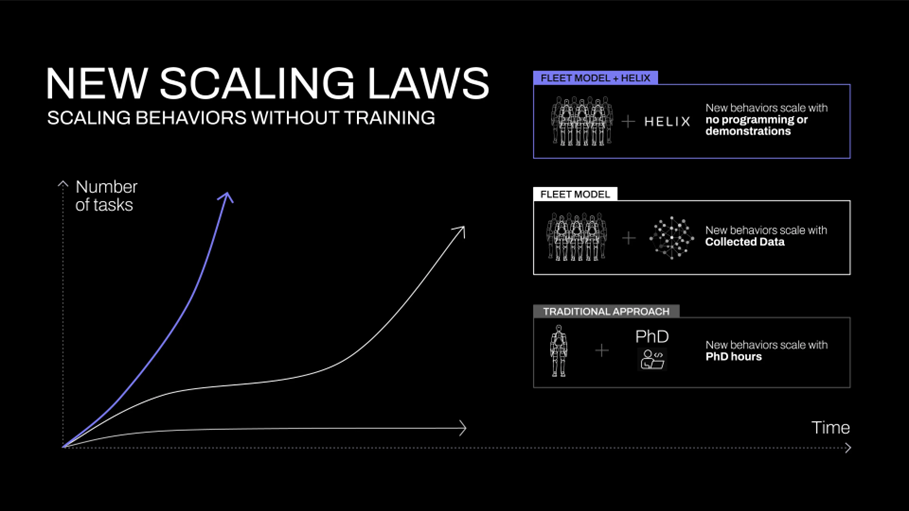
人形机器人发展突破路径明晰,与物理数据世界基础模型模型结合的视觉语言动作端到端大模型VLA是目前人型机器人走向AGI的解决方案;美国Figure发布端到端VLA大模型Helix实现机器人多业务协同突破;智元机器人将于3月10日正式发布首个通用具身基座模型——智元启元大模型,将集合采训推一体,小样本快速泛化、“一脑多形”的跨本体应用、持续进化、人类视频学习等能力。Helix是一个通用的视觉-语言-动作(VLA)模型,它统一了感知、语言理解和学习控制,具有高速连续控制、多机协作、强大的物体抓取能力、统一神经网络、便于商业化部署等多种特性,使机器人可实现协作交互,完成分拣等家庭任务,克服了机器人技术中的多个长期挑战。
高精度物理数据结合世界基础模型和大语言模型带领具身智能进入感知时代。VLA模型整合视觉、语言与行动决策,极大提升机器人对复杂环境的理解适应能力,但训练该模型依靠高精度真实物理数据和少量衍生的物理合成数据,而非大语言模型对应的文本或图像数据,这需要感知能力参与物理数据的收集和端到端的精准动作控制。这一新范式让机器人可在多样场景自主决策,灵活应对未知环境,在制造业、物流、家庭服务等领域广泛应用,并且,它能适配机械臂、四足机器人等人形机器人平台做到“一脑多形、多机协作”,为智能机器人发展带来巨大潜力与实用价值,是智能机器人领域关键驱动力。
智驾技术同源研发同时提供工业场景训练大脑及提供落地,车企或为人形机器人核心参与者。除美国车企特斯拉外,近期中国车企小鹏汽车、小米集团、蔚来汽车、广汽集团、BYD等多家整车上市公司,纷纷宣布正式布局人形机器人市场。其中,小米推进旗下CyberOne在自家制造产线分阶段落地,定位为家庭护理、陪伴等多场景仿生机器人。小鹏汽车透露L3级别人型机器人将于2026年实现量产,已公布AI机器人Iron将搭载自研芯片,具备15个自由度及拟态双手。广汽集团发布了自主研发的第三代具身智能人形机器人GoMate,计划于2025年实现自研零部件的批量生产,并率先在广汽传祺、埃安等主机厂车间生产线和产业园区开展整机示范应用。上汽集团通过旗下全资子公司成立重庆赛创机器人科技有限公司。奇瑞汽车于2024年4月联手AI公司Aimoga共同研发了人形机器人Mornine,正式进军人形机器人赛道。蔚来已组建20人团队调研机器狗项目。理想汽车也表示未来将涉足人形机器人领域。目前,全球已有约18家车企接入人形机器人赛道。
新兴行业或促汽零产业蜕变,相关企业估值有待重塑。随着人工智能技术的快速发展,AI有望为人形机器人成倍赋能,人形机器人从工业场景到通用场景的拓展路径逐渐清晰,未来有望在服务业、家庭,乃至护理场景中广泛应用。若行业0-1阶段成功度过,板块有望迎来实质性成长,产业链催化不断。其中,汽车零部件与机器人零部件高度协同,汽车零部件及自动驾驶零部件的战略转型可期。
传感器是机器人实现智能化的必要部件。传感器是用于感知外部环境和自身状态的设备。感知是人形机器人控制和执行的前提。传感器能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。感知层的传感器是软件控制和硬件零部件的桥梁,是物理世界与数字世界的接口,是实现具身智能的关键。人形机器人传感器包括视觉传感器、惯性测量单元IMU、力/扭矩传感器、触觉传感器、位置传感器、听觉传感器、温度传感器、电流传感器、气压传感器等。其中最主要的是力矩传感器、触觉传感器和视觉传感器这三大传感器。特斯拉等头部人形机器人厂商均配置了各类传感器。
多类传感器广泛应用于人形机器人。力觉传感器是机器人实现精密行动的关键,技术壁垒极高,能够实时测量机器人关节或末端执行器受到的力和力矩,为控制系统提供关键的反馈信息;可以让机器人在执行操作时能够自主调整其姿态,从而确保操作的稳定性和精确度。视觉传感器是机器人捕捉信息的途径,分为2D及3D两大技术路径。触觉传感器是机器人感知环境的重要组件,主流技术方向为MEMS压力传感器及电子皮肤。MEMS传感器是感知层面的重要部件,陀螺仪及IMU有望在机器人领域得到广泛应用。目前,全球MEMS惯性传感器市场份额主要被海外龙头占领,C5均为国外厂商,且集中度均达到80%以上。而中国MEMS惯性传感器市场主要被博世、ST等国际龙头厂商占据,国产替代空间十分可观。
感知与任务执行的核心:灵巧手是人形机器人的重要硬件模块,集成化、多自由度发展,或随人形机器人产业落地打开百亿市场。灵巧手是人形机器人的末端执行器、对外交互的重要窗口,其硬件模块包括驱动系统、传动系统及感知系统。类似人手的灵巧手架构更适应人类生活/工作环境,在数据易得性、环境适应性等方面更具优势。灵巧手诞生自20世纪70年代,回顾其发展历程,其发展趋势是在小体积/重量、低成本、耐用可靠的边界条件下追求【灵活性、抓握力、精度】的提升。特斯拉Gen3灵巧手自由度翻倍至22,预计或采用【电机 丝杠】或【电机 减速器 丝杠】方案。经测算,在百万台销量下,灵巧手市场空间将达近430亿元。
驱动系统:电驱方案为主流,空心杯电机及无刷有齿槽电机或为主要选择。驱动系统是力量之源,在驱动结构、放置方式、方案选型等方面均存在不同技术路线,结合性能和成本等方面的权衡,产业端基本采用欠驱动下的电机方案。落实到电机选型上,可选方案包括直流无刷电机、空心杯电机及无框力矩电机。空心杯具有响应迅速、转换效率高等优势,是灵巧手的优质选择。而从边际上,特斯拉通过将执行器放置于前臂,无刷电机的体积劣势得到缓解,凭借成本优势,其用量或显著提升。
传动系统:腱绳广泛应用,微型丝杠/微型谐波减速器等新方案产业提速。传动系统传导来自驱动系统的运动和力,对灵巧手抓取稳定性、精度、灵活性有重要作用。其存在较大路线分歧,我们认为腱绳方案凭借远距传动、灵活柔性等优势,在多自由度趋势下或被广泛采用,其寿命、负载等方面的劣势有望随材料端优化而缓解。微型丝杠、微型谐波减速器为新兴传动结构,在精度、承载力等方面各具优势,随产业成熟推动降本后或广泛应用,五洲新春、绿的谐波等国内企业正积极入局研发。
投资建议:
机器人本体:小鹏汽车、小米集团、BYD、比亚迪电子、广汽集团、优必选
AI基础设施/互联网巨头入局具身智能:阿里巴巴、腾讯集团
电机:鸣志电器、兆威机电、雷赛智能、鼎智科技、拓邦股份、伟创电气、禾川科技、步科股份;
传感器:柯力传感、芯动联科、东华测试、华依科技、安培龙、敏芯股份、华培动力、汉威科技、奥比中光。
优质机器人核心龙头与低位转型汽车零部件标的:银轮股份、均胜电子、爱柯迪、无锡振华、恒帅股份、新泉股份、旭升集团、精锻科技、隆盛科技、伯特利。
国产机器人产业链感知系统核心环节:地平线机器人、速腾聚创、瑞芯微、全志科技、奥比中光、欧菲光、韦尔股份。
减速器:绿的谐波、双环传动、斯菱股份、中大力德、豪能股份、国茂股份;
丝杠:恒立液压、北特科技、贝斯特、五洲新春、震裕科技、双林股份;
风险提示:1.人形机器人终端应用落地不及预期;2.人形机器人核心部件降本进程不及预期;3.机器人大小脑训练进程不及预期等。
正文:
1.1Figure发布Helix,突破人形机器人瓶颈
Helix突破瓶颈,成功适配家庭环境。距离与OpenAI分道扬镳不到一个月,Figure公司于2025年2月20日正式发布了新一代Helix大模型。在此前,家庭环境是机器人技术面临的最大挑战,与可控的工业环境差异显著。家庭场景中存在大量多类、多性质的物品,例如易碎的玻璃器皿、褶皱的衣物、散落的玩具等,其形状、尺寸、颜色和质地都具有不可预测性,导致机器人难以在家庭中发挥有效作用。为了让机器人在家庭中发挥作用,它们需要能够按需生成智能的新行为。人工智能的其他领域已经掌握了这种即时泛化的能力,但如何将视觉-语言模型(VLM)中捕获的丰富语义知识直接转化为可泛化的机器人控制,成为将机器人技术扩展到家庭环境中的一大挑战。而Helix是一个通用的视觉-语言-动作(VLA)模型,它统一了感知、语言理解和学习控制,克服了机器人技术中的多个长期挑战。

资料来源:Figure,方正证券研究所
资料来源:Figure,方正证券研究所
1.2 Helix达成多个行业首创,引领人形机器人走向感知交互时代
Helix 在多个重要方面成功实现了行业首创,为机器人领域的发展树立了新的标杆。
高速连续控制:Helix是首个能够以高达200Hz的高频率对人形机器人的整个上半身进行连续控制的VLA。其控制范围极为全面,涵盖了手腕、躯干、头部乃至每个手指的灵巧动作。如此精细化且高频的控制,为机器人赋予了前所未有的灵活性和操作精度,这使得机器人能够更好地适应各种复杂的任务和环境。
多机协作:Helix首次实现了两个机器人同时运行同一模型,并且能够协作完成涉及陌生物体的长时段任务。这种多机器人协作的能力,不仅拓展了机器人在实际应用中的功能,还为一些需要多人协作完成的复杂任务提供了新的解决方案,例如在物流仓库中协同搬运货物、在灾难救援现场共同完成搜索和救援任务等。
配备了Helix 的 Figure 机器人具有强大的物体抓取能力。它能够仅仅依据自然语言指令,就抓取任何小型家用物体,甚至包括数千种在其训练过程中从未出现过的陌生物品。这一能力的实现,得益于Helix 对自然语言的精准理解以及对视觉信息的高效处理,使得机器人能够迅速分析物体的特征和位置,并规划出合适的抓取动作,极大地提高了机器人在家庭环境以及其他场景中的实用性。
单一组神经网络权重:Helix仅使用单一组神经网络权重,便能够轻松应对诸如多机器人交互等多种复杂行为,并且在这个过程中无需针对任何特定任务进行额外的微调。传统的机器人控制模型往往需要针对不同的任务分别训练不同的模型,这不仅耗费大量的时间和计算资源,而且在实际应用中缺乏灵活性。而Helix 的这种创新设计,使得它能够凭借一套通用的神经网络权重,快速适应各种不同的任务需求,大大提高了模型的通用性和效率。
Helix便于商业化部署。Helix在技术实现上具有显著的商业应用优势,它是首个完全在嵌入式低功耗GPU 上运行的VLA。这一特性使得它无需依赖高端且昂贵的设备,即可直接投入商业应用。嵌入式低功耗GPU 的使用,不仅降低了硬件成本,还提高了设备的便携性和稳定性。这意味着在实际的商业场景中,无论是在家庭服务机器人、工业生产辅助机器人还是其他领域的应用中,都能够以较低的成本部署Helix 模型,为机器人的商业化推广和广泛应用提供了有力的支持。
1.3 Helix核心运行原理:基于“S1 - S2”分层架构实现语义理解与动作控制协同
Helix的核心运行原理基于双系统协同架构、端到端训练优化与高效部署策略。
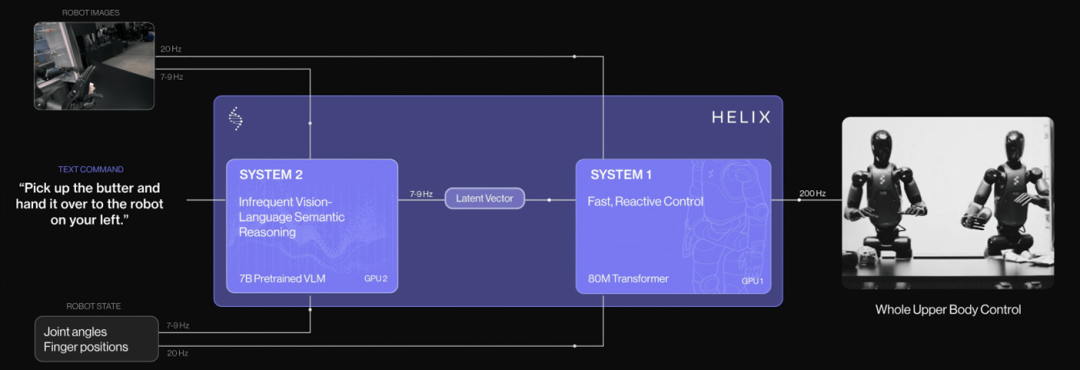
Helix创新性地采用“System 1(S1)-System 2(S2)”分层架构,兼顾语义泛化能力与高频实时控制。
System 1(S1):实时动作生成层。这是一个拥有80M 参数的跨注意力编码器- 解码器Transformer,以200Hz 的高频接收来自System 2(S2)的潜向量、实时图像及状态信息,进而输出涵盖手腕位姿、手指屈伸、躯干和头部姿态等35 自由度的连续控制指令。其核心技术包含多尺度视觉编码器,该编码器可从图像中提取细节特征,以支持如抓取微小物体这类精细操作;潜向量条件化技术则将S2 的语义信息与视觉特征相融合,用以指导动作生成;任务完成度预测技术可输出“任务完成百分比”作为终止条件,以此支持多行为序列化。这些核心技术赋予了S1 显著优势,它能够实现类似人类上半身的协调运动,例如让头部视线跟踪手部动作,还避免了传统高维控制中常出现的稳定性问题。
System 2(S2):语义理解与规划层。其是基于互联网预训练的7B参数视觉语言模型(VLM),以7-9Hz频率处理图像、机器人状态(如手腕位姿、手指位置)及自然语言指令,提取高层语义目标(如“将饼干袋递给右侧机器人”),并生成一个连续潜向量(Latent Vector),编码任务相关的语义信息(如目标物体属性、协作意图),作为S1的调控信号。优势在于利用大规模预训练VLM的泛化能力,实现零样本(Zero-shot)跨物体、跨场景理解。
S2与S1协同。S2可以针对高层次的目标进行 “慢思考”,而S1则可以“快思考”,实时执行并调整动作。S1能够在保持S2语义目标的同时,迅速适应协作机器人不断变化的动作。S2低频更新语义目标,S1高频调整动作,形成“慢思考-快执行”闭环。此外,在训练时引入S1与S2的输入时间偏移,匹配实际推理延迟,确保部署时控制连贯性。
与现有的方法相比,Helix的“S1-S2双层架构”具备速度高、泛化能力强、可扩展性、架构简洁、系统独立等关键优势。
速度与泛化能力:Helix能对数千个新测试物体进行零样本泛化,且速度与专门的单任务行为克隆策略相当。
可扩展性:Helix能直接为高维动作空间输出连续控制指令,从而避免了以往视觉语言动作(VLA)方法中所采用的复杂动作标记方案。此前的那些方案在低维控制场景(如二值化的平行夹爪控制)中已取得一定成效,但在高维人形机器人控制方面却面临着可扩展性难题。
架构简洁性:Helix采用的是标准架构—— 系统2运用的是一个开源且权重开放的视觉语言模型,而系统1采用的是一种基于简单Transformer 的视觉运动策略。
系统独立:将系统1和系统2解耦,能够独立地对每个系统进行迭代优化,无需受限于寻找统一的观测空间或动作表征。
资料来源:Figure,方正证券研究所整理
1.4 Helix核心运行原理:数据处理、训练与推理部署
Figure 收集多机器人、多操作员高质量数据集,构建严谨的数据处理与利用流程。
Figure收集了一个高质量的多机器人、多操作员数据集,其中包含各种远程操控行为的数据,总量约为500小时。为了生成以自然语言为条件的训练数据对,Figure使用了一个自动标注的视觉语言模型(VLM)来生成事后指令。这个视觉语言模型处理来自机器人机载摄像头的分段视频片段,并给出提示:“你原本会给机器人下达怎样的指令,才能让它做出这段视频中展示的动作呢?”为了防止数据污染,所有在训练过程中处理过的物品都不会用于评估。
Figure采用端到端模式训练Helix。
Helix采用完全端到端的方式进行训练,通过标准的回归损失函数,将原始像素和文本指令映射为连续动作。梯度通过用于指导S1行为的潜在通信向量从S1反向传播到S2,从而实现两个组件的联合优化。Helix不需要针对特定任务进行调整;它保持单一的训练阶段和一组神经网络权重,无需单独的动作头或针对每个任务的微调阶段。在训练过程中,Figure在S1和S2的输入之间添加了一个时间偏移。这个偏移量经过校准,以匹配S1和S2在部署时的推理延迟差距,确保在训练中准确反映部署时的实时控制要求。
Helix的训练设计使其能在配备双低功耗嵌入式GPU的Figure机器人上进行高效的模型并行部署。推理流程在S2(高级潜在规划)和S1(低级控制)模型之间进行拆分,每个模型都在专用的GPU上运行。S2作为一个异步后台进程运行,处理最新的观测数据(来自机载摄像头和机器人状态)以及自然语言指令。它不断更新一个共享内存中的潜在向量,该向量对高级行为意图进行编码。S1作为一个单独的实时进程运行,维持着流畅的上半身整体动作所需的关键200赫兹控制循环。它同时接收最新的观测数据和最新的S2潜在向量。S2和S1推理速度的固有差异自然使得S1在处理机器人观测数据时具有更高的时间分辨率,从而为反应式控制创建了一个更紧密的反馈循环。这种部署策略特意模仿了训练中引入的时间偏移,以最小化训练和推理之间的分布差异。异步执行模型允许两个进程以各自的最佳频率运行,使我们能够以与最快的单任务模仿学习策略相同的速度运行Helix。
1.5 VLA可赋予机器人精准控制、灵活协作与强大抓取能力
细粒度VLA上半身控制实现精准协同
VLA(以Helix为例)以200Hz频率协调35自由度动作空间,能精准控制手指、末端执行器、头部及躯干动作。过去,头部与躯干控制因反馈回路易致不稳定,如今VLA可平稳应对,机器人能头部追踪手部、调整躯干抓取,且全程精确控制手指。以往,在高维动作空间实现此精度极难,而VLA系统(如Helix)不仅能实时协同,还可跨任务和物体泛化,这是先前VLA系统未做到的。
零样本多机器人协作展现VLA适应性与灵活性
VLA助力零样本多机器人协作。在双Figure机器人协作存储杂货这一挑战场景中,Helix表现出色。如机器人能操作训练中未见的全新杂货,展现对不同形状、大小、材质物品的强大泛化能力。而且,两机器人用相同Helix模型权重,无需针对个体训练或明确角色分配,通过自然语言提示(如“递饼干袋给右边机器人”等)就能协同作业。这是VLA首次实现多机器人灵活、持续协作,且成功处理全新物品。
“拾取任意物品”能力凸显VLA语言到动作的转换优势
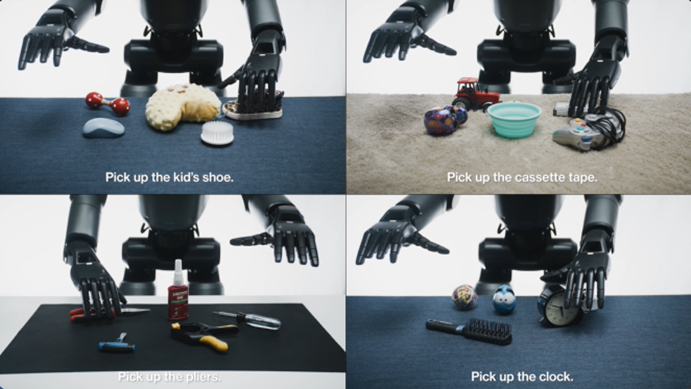
VLA赋予机器人“拾取任意物品”能力。配备Helix的Figure机器人,仅凭“拾取[物品名]”指令,就能拾取各类小型家用物品。系统测试中,机器人成功处理杂乱环境里数千种新物品,无需预先示范或定制编程。VLA代表Helix能有效连接互联网级语言理解与精准机器人控制。比如,指令“拾取沙漠物品”,它能识别玩具仙人掌符合要求,还能操控最近的手精准抓取。这种“语言到动作”的通用抓取能力,为非结构化环境部署类人机器人带来新机遇。
图:Helix可以让人形机器人抓取各类物品

资料来源:Figure,方正证券研究所整理
1.6 端到端大模型VLA有望带领具身智能进入感知时代
Helix是第一个真正运行在人形机器人上面的端到端大模型。在Figure发布Helix大模型之前,端到端大模型主要运用于自动驾驶,人形机器人方面未使用此模型。端到端模型嵌入人形机器人是人形机器人行业的一大重要突破。
VLA(Vision - Language - Action 模型)是具身智能新范式,赋予机器人对复杂环境的解决能力。它能依据语言指令与视觉信号,直接生成机器人可执行动作。它打破单任务训练局限,推动机器人朝通用、泛化方向发展。VLA模型整合视觉、语言与行动决策,极大提升机器人对复杂环境的理解适应能力。这一新范式让机器人可在多样场景自主决策,灵活应对未知环境,在制造业、物流、家庭服务等领域广泛应用,并且,它能适配机械臂、四足机器人等人形机器人平台,为智能机器人发展带来巨大潜力与实用价值,是智能机器人领域关键驱动力。
由VLA 构成的机器人系统主要涵盖视觉感知处理模块、语言指令理解以及生成机器人可执行动作的策略网络。根据不同需求,当前VLA 主要分为三类范式:显示端到端VLA、隐式端到端VLA 以及分层端到端VLA。
显示端到端VLA 是最常见经典的范式,一般把视觉语言信息压缩成联合表征,再基于此表征重新映射到动作空间以生成相应动作,该端到端范式借助先前广泛研究先验,通过不同架构(diffusion/transformer/dit)、不同模型大小、不同应用场景(2d/3d)以及不同任务需求(从头训/ 下游微调),衍生出各类方案并取得不错性能。
隐式端到端VLA 与之不同,更注重工作可解释性,利用当前video diffusion 模型预测未来状态,再依据未来状态按逆运动学规律生成未来可执行动作,显式生成未来观测既提高了可解释性,也增加了避开机器人动作来扩展VLA 模型的潜能。
分层端到端VLA 则聚焦于充分发挥大小模型特点,在提升模型泛化性的同时保持对下游执行频率的高效性,近来成为研究热点。
2.1汽车智能驾驶端到端模型可迁移至具身智能,均强调模型的泛化能力
传统自动驾驶系统采用模块化串联,存在信息传递损耗及延迟等问题。传统智能驾驶方案核心模块分为感知、定位、预测、决策和控制等,在模块上的划分使得每个模块的独立开发更加容易,在进行问题追溯时也更加简单快速。但传统方案面临每个模块的输入通常来源于前一传递过程中可能出现的损耗、计算延迟以及累积误差等问题,限制了模块及整个系统所能达到的灵活性和泛化性的上限。
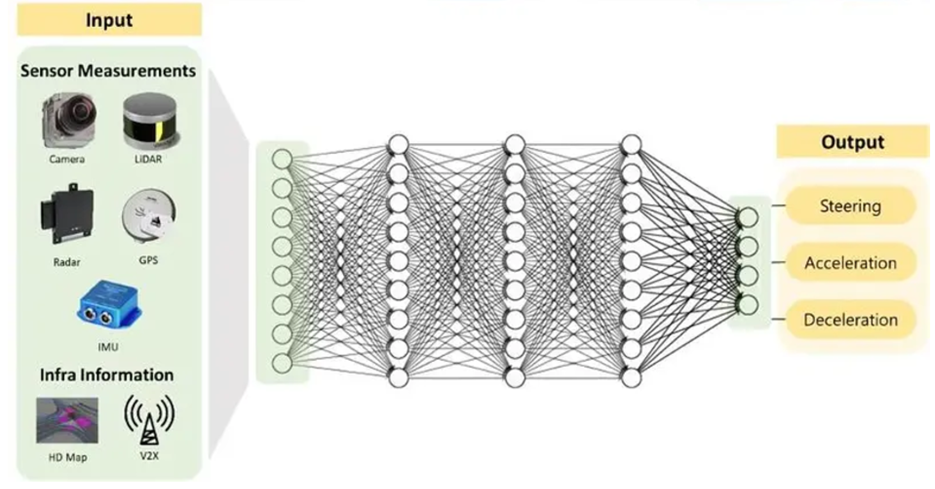
端到端架构强调感知信息无损传递、可以实现自动驾驶系统的全局优化。车端智能驾驶系统朝端到端架构演进,与具身智能具有通用性。端到端模块化自动驾驶的核心在于不同子模型在各个模块中的嵌套与协同工作,随着Transformer架构等先进算的发展,模型间的界限正逐渐变得模糊。原本独立的子任务模型正逐步被更大规模的神经网络模型所取代,不断提升系统的能力上限。根据CSDN,VLA(Vision Language Action)具备高度的通用性,由于它是建立在一个通用的大规模预训练基础上,理论上具身智能经过微调后都可以使用相应算法。
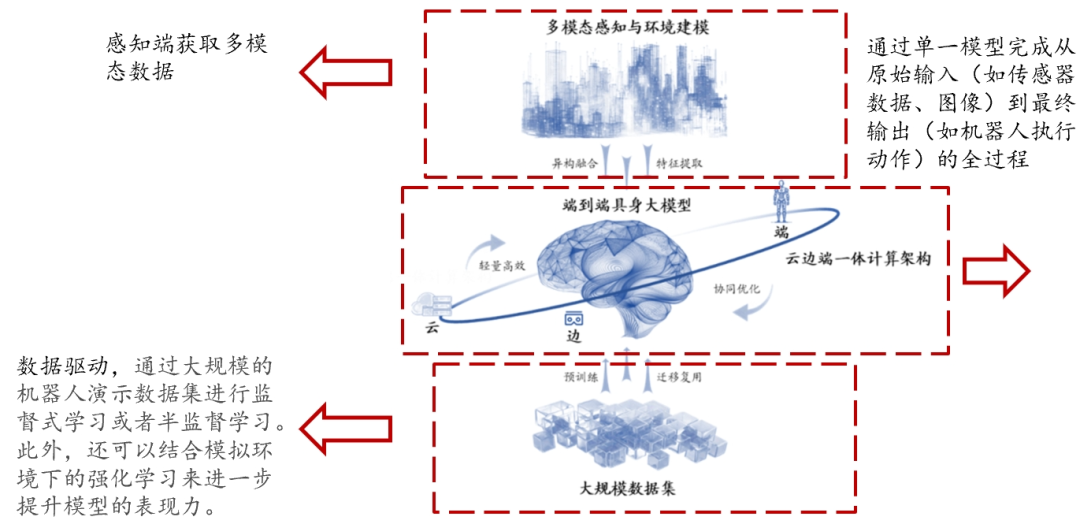
图:汽车一段式端到端构架
2.2 大模型提升泛化能力,辅助端到端架构应用于具身智能领域
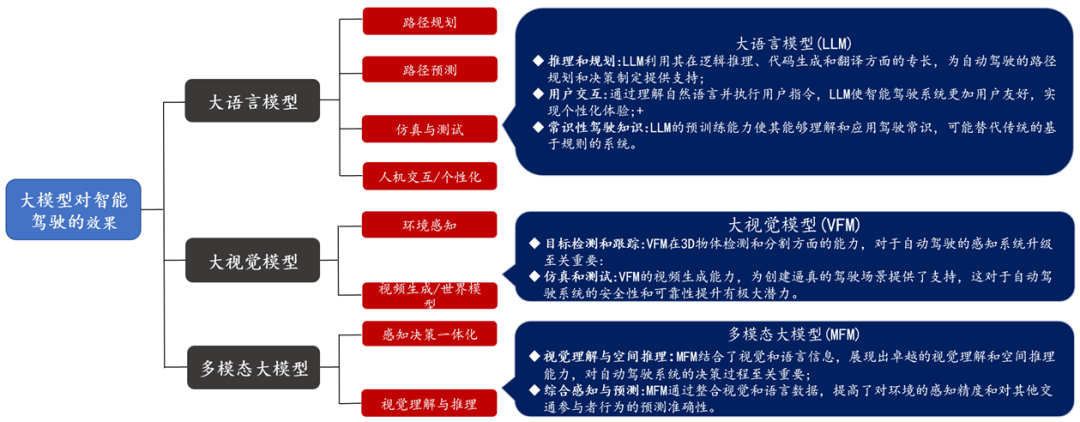
对于车端而言,大模型可提升智能驾驶泛化能力,辅助端到端架构逐步上车。大模型并非是实现端到端的必要条件,端到端的最终目的是让车辆能够自主导航并安全行驶,而大模型为端到端实现提供了优良的可选方案。大型语言模型、大型视觉模型以及多模态大模型等基础模型可通过预训练获得智驾相关的推理能力和丰富的知识,用于升级传统的基于规则的if-else系统。其出色的泛化能力能够应对自动驾驶技术发展中的挑战,提升在感知、预测、规划等关键领域的性能,升级自动驾驶仿真和测试环节的技术手段。
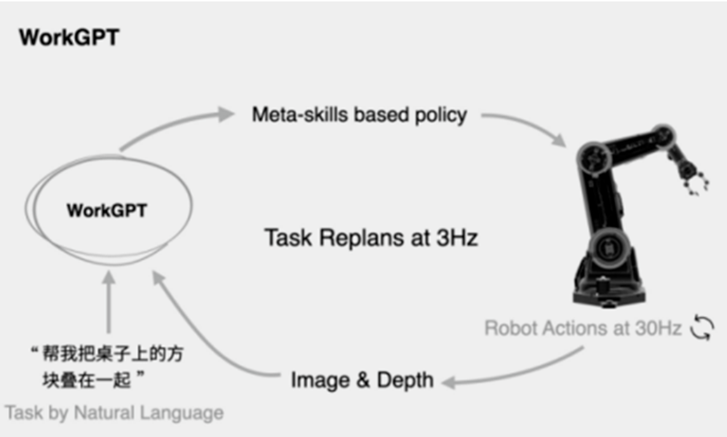
对于机器人而言,大语言模型是人形机器人“大脑”实现智能化的关键。在人形机器人的应用中,大模型集成了多模态的感知模块,这些模型在自然语言处理、计算机视觉、语音识别等领域展现出强大的语义理解、逻辑推理以及多模态学习等能力。结合端到端方案可直接处理多模态传感器输入并生成运动控制指令,打通了感知到控制的全流程,被视为人形机器人应用大模型的潜在主流技术路线,端到端架构与大模型的深度融合,有望推动人形机器人系统向更高水平的鲁棒性、效能和灵活性演进,显著增强其复杂环境适应能力与任务执行效率。
资料来源:甲子光年,方正证券研究所
2.3 车企跨界竞速,机器人赛道开启 “狂飙” 模式
小鹏汽车于2024年11月6日在AI科技日上发布了新一代人形机器人Iron。Iron的设计采用了高度仿人结构,身高178厘米,体重70公斤,拥有62个主动自由度,其双手按照1:1人类双手尺寸设计,具备15个自由度,并支持触觉反馈,能够进行精细的操作和交互。Iron搭载了图灵AI芯片,算力高达3000T,能够支持复杂的语言理解和逻辑推理,使其在智能交互方面表现出色。此外,Iron配备了先进的AI鹰眼视觉系统,可实现720°无死角感知环境,确保其在复杂场景下的高效导航和操作。在运动能力方面,Iron采用了端到端大模型和强化学习算法,使其行走更加自然流畅。目前,Iron已在小鹏工厂的部分岗位上开始了“工作”实训,未来将优先应用于工厂的搬运、分拣等任务,并有望在门店中作为汽车顾问,为消费者提供服务。


资料来源:腾讯新闻,方正证券研究所
2022年8月期间,小米亮相了其人形机器人产品CyberOne。CyberOne身高177厘米,体重52公斤,是一款具有高度仿生设计和强大运动能力的机器人。其智能和机械能力由小米机器人实验室全栈自研完成,研发难度较之前的机械狗更高。在全身控制算法方面,CyberOne配备16个关节,拥有21个全身自由度,最高时速可达3.6km/h。其情绪感知模块包括显示模块、听觉传感器和视觉传感器,能够实现“视听显”多方面的功能需求。音频算法上,CyberOne支持85种环境语义识别和6类45种人类语义情绪识别。

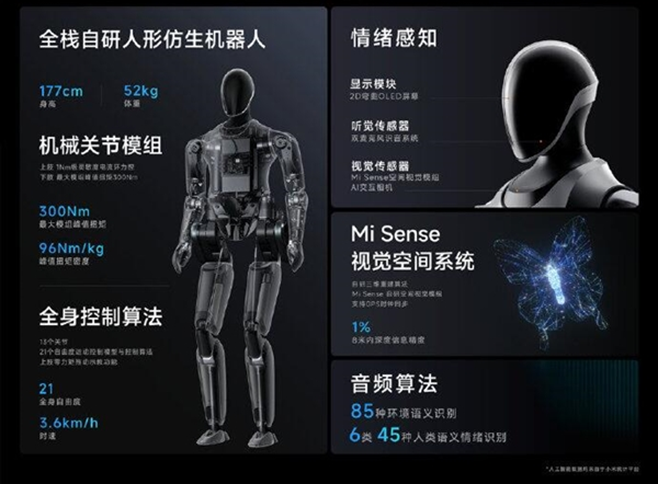
资料来源:腾讯新闻,站长之家,创泽机器人,方正证券研究所
2024年12月26日,广汽集团正式发布自主研发的第三代具身智能人形机器人GoMate。GoMate是一款全尺寸轮足人形机器人,拥有38个自由度。其创新性地采用了行业首创的可变轮足移动结构,融合了四轮足和两轮足两种模式:四轮足模式下,机器人高度约1.4米,可稳健上下楼梯、爬坡及单边越障;两轮足模式下,机器人站姿高度可达1.75米,动作灵活高效,空间占用更小。在硬件层面,GoMate实现了灵巧手、驱动器、电机等核心零部件的完全自研。其中,灵巧手采用刚柔结合设计,兼顾负载能力和碰撞安全;微型低压伺服驱动器高度仅30mm,面积接近硬币大小,驱动能力高达20A,并配备EtherCAT、CAN等丰富接口;轴向磁通电机最大输出力矩达1000N·m,力矩密度高达200N·m/kg,且具备5倍以上过载倍数。


上汽集团通过旗下全资子公司成立了赛创机器人科技有限公司。公司希望通过机器人企业的技术和创新能力,为自身的汽车制造与服务领域带来新的发展机遇。近年来,上汽集团在产业金融投资方面持续加大对人工智能、集成电路等“硬核科技”的关注。同时,上汽集团以投资机器人企业的形式布局人形机器人,2024年3月,上汽创投参与人形机器人本体企业智元机器人的A3轮战略融资。除了上汽创投,上汽金控旗下私募股权投资机构尚颀资本、恒旭资本也在加大对“投早、投小、投科技”的探索,积极布局新赛道。尚颀资本于2024年7月参与通用机器人初创公司逐际动力LimXDynamics A轮战略融资,恒旭资本正在研究推进相关潜在标的。


资料来源:腾讯新闻,搜狐新闻,中国证券网,方正证券研究所
2.4 车企布局机器人赛道,有望推动供应链降本与零部件复用
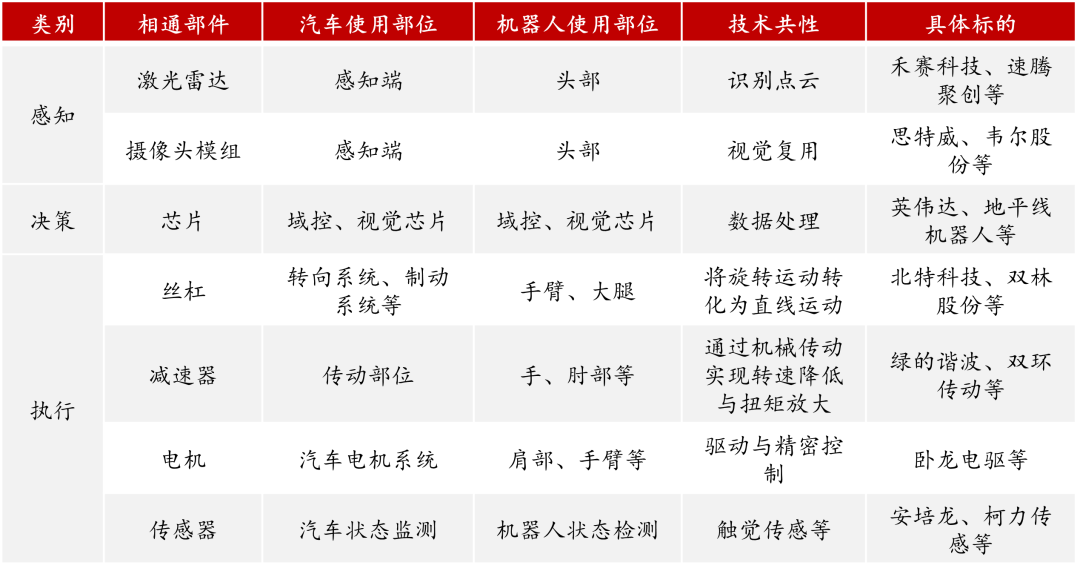
产品供应链重合度高,车端降本经验有望复用于具身智能。目前人形机器人与汽车的部分零部件具备一定技术相通性,二者在感知端的视觉、决策端的芯片以及执行端的丝杠等产品供应链重合度较高,汽车领域有产品和技术储备的玩家有望实现车端向人形机器人产业的延伸,对精度及轻量化进行针对性优化后有望持续推动人形机器人的产业化降本。
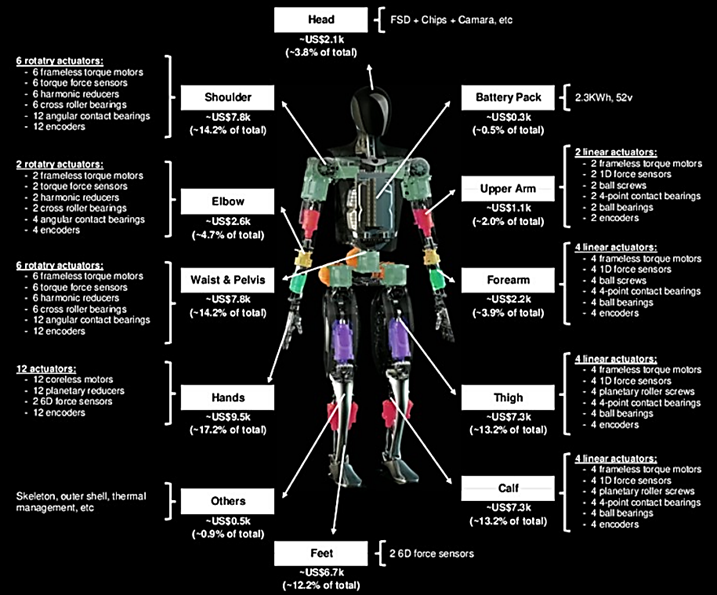
资料来源:摩根士丹利,方正证券研究所
3.1 传感器是人形机器人实现智能化的必要部件
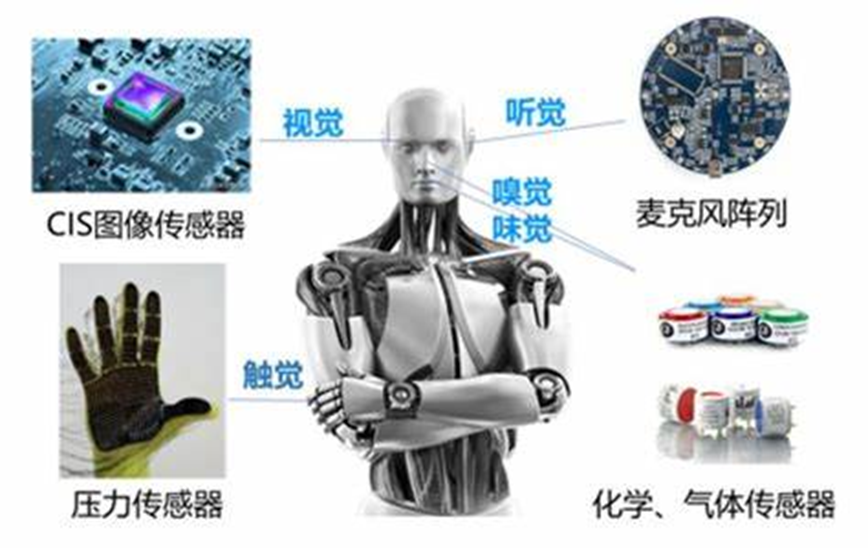
传感器是人形机器人的核心部件,是人形机器人实现智能化的必要部件。人形机器人传感器是安装在人形机器人上,用于感知外部环境和自身状态的设备。感知是人形机器人控制和执行的前提。传感器是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。感知层的传感器是软件控制和硬件零部件的桥梁,是物理世界与数字世界的接口,是实现具身智能的关键。
人形机器人的传感器几乎遍布机器人全身。人形机器人传感器包括视觉传感器、惯性测量单元IMU、力/扭矩传感器、触觉传感器、位置传感器、听觉传感器、温度传感器、电流传感器、气压传感器等。其中最主要的是力矩传感器、触觉传感器和视觉传感器这三大传感器。
3.1.1 特斯拉等头部人形机器人厂商均配置各类传感器
特斯拉
特斯拉的人形机器人(Optimus)在感知系统方面使用了一系列传感器来支持其功能和性能。
六维力传感器:Optimus最宝贵的传感器之一,主要用于精确测量力和力矩,Optimus使用了4个。
关节力矩传感器:用于检测和测量机器人关节处的力矩,Optimus使用了28个。
视觉传感器:包括摄像头和其他视觉组件,用于环境感知和导航,Optimus使用了3个。惯性测量单元(IMU):用于检测和保持机器人的姿态,Optimus使用了4个IMU芯片。
触觉传感器:用于感知接触和物理交互,Optimus使用了10个。
先进性:具有移动中的灵活作业能力;一体化大模型趋于完善。
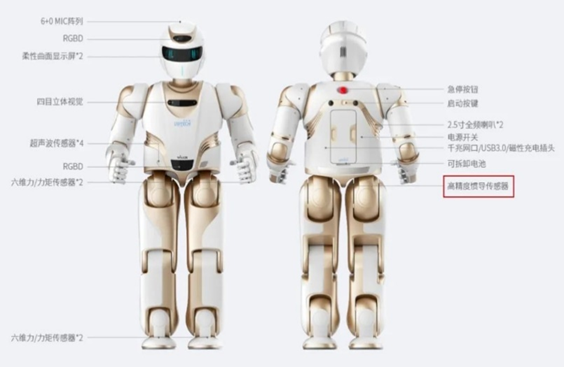
优必选
优必选的人形机器人(Walker S1)所拥有的传感器如下:
视觉传感器:集成化头部设计,配备双耳鱼眼相机,拥有 3D 立体视觉功能,可实现 360°多模态感知,Walker S1使用了2个。
触觉传感器:仿人灵巧手装备 6 个阵列式触觉压力传感器,可使其操作更加精准灵活。
力和力矩传感器:配置六维力传感器 4 个,其中脚部及手腕各 2 个。
高精度姿态传感器:1 个。
先进性:具有面向通用任务的多模态规划大模型、语义VSLAM、学习型运动控制等具身智能关键技术。
宇树科技
宇树科技的人形机器人H1所拥有的传感器如下:
视觉传感器:配置3D 激光雷达1 个,用于环境感知和定位导航等;配置深度相机 1 个,与激光雷达配合实现 360° 全景深度感知。
力矩传感器:4个
先进性:H1是国内第一款能跑的全尺寸通用人形机器人,也是全球同类规格中功率性能最高的机器人—— 94 斤、最大关节扭矩360N.m。
3.2 力觉传感器-精密行动的关键
力矩感知不仅关乎机器人运动的稳定性和精确性,还直接影响机器人与环境的交互能力。力矩传感器能够实时测量机器人关节或末端执行器受到的力和力矩,为控制系统提供关键的反馈信息;可以让机器人在执行操作时能够自主调整其姿态,从而确保操作的稳定性和精确度。
运动控制:力矩传感器通过感知机器人关节的力和力矩,实现精确的轨迹规划和运动控制。这使得机器人能够更加平滑、稳定地完成各种动作。
姿态调整:根据传感器提供的力和力矩信息,人形机器人可以调整其姿态,确保与环境或目标的交互更加精确和安全。
平衡控制:实时感知机器人的重心位置和平衡状态,通过调整机器人的姿态和动作来维持平衡,防止因外部扰动导致的倾倒或失稳。
力反馈:在人机交互场景中,力矩传感器能够感知到机器人与人类之间的交互力,并将这些力学信息转化为电信号反馈给控制系统。这有助于指导机器人的动作调整和姿态优化,实现更加自然、安全的交互体验。
数据采集:力矩传感器通过内部的传感元件将力和力矩的物理量转化为电信号输出,这些电信号需要被数据采集设备实时捕获,并传输到计算机或数据处理系统中进行后续处理。
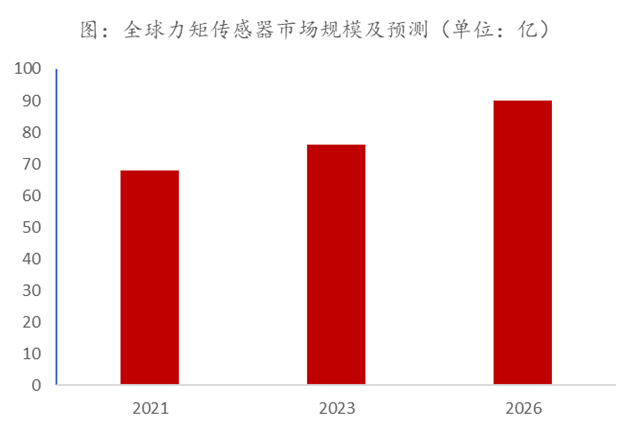
力矩传感器市场空间广阔。2021年全球力矩传感器市场规模为68 亿美元,2023年达到 76亿美元,年均增长率(CAGR)为5.7%。预计到2026 年将达到 90亿美元左右。
3.2.1 力觉传感器可按照测量维度以及原理进行划分
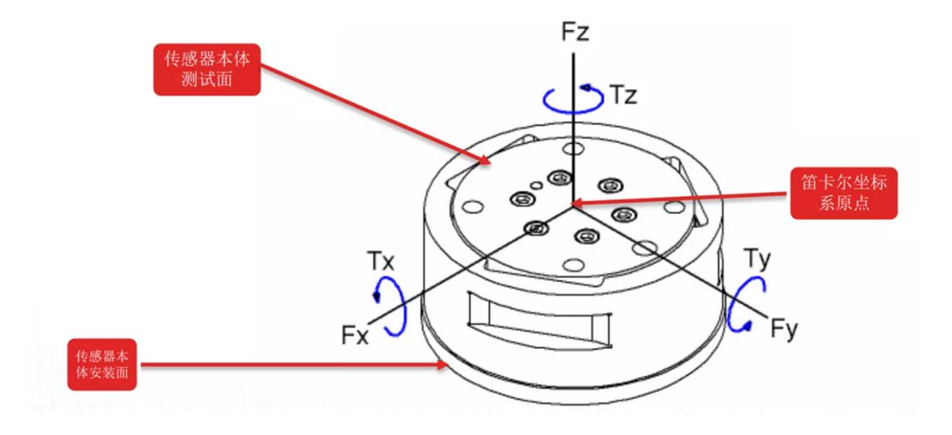
按照测量维度,力矩传感器可分为一至六维力矩传感器,其中一维传感器、三维传感器和六维传感器最为常见。
一维力传感器:标定坐标轴为0Z轴,如果被测量力F的方向能完全与0Z轴重合,一维力传感器即可以完成测量任务:代表产品有称重传感器、压力传感器等;当力的方向与传感器的测量轴线平行但不重合,此时传感器的测量结果将会出现较大的误差。
三维力传感器:如果力F的作用点P始终与传感器的标定参考点0保持重合力F的方向在三维空间中随机变化,则三维力传感即可完成测量任务,它可以同时测量Fx、Fy、Fz这三个F的分力。当力的作用点远离传感器,这个力在经过正交分解并平移至三维力传感器的校准中心后,传感器即要承受力Fx/Fy/Fz三分量的作用,同时又要承受Mx/My/Mz三个弯矩的作用,这种情况下,三维力传感器的测量结果将会出现较大偏差。
六维力传感器:空间中任意方向的力F,其作用点P不与传感器标定参考点重合且随机变化,这种情况下就需要选用六维力传感器来完成测量任务,同时测量Fx、Fy、Fz、Mx、My、Mz六个分量。六维力传感器的内部算法,会解耦各方向力和力矩间的干扰,使力的测量更为精准:这类传感器更适用于参考点的距离较远,且随机变化情景,测量精度要求较高。
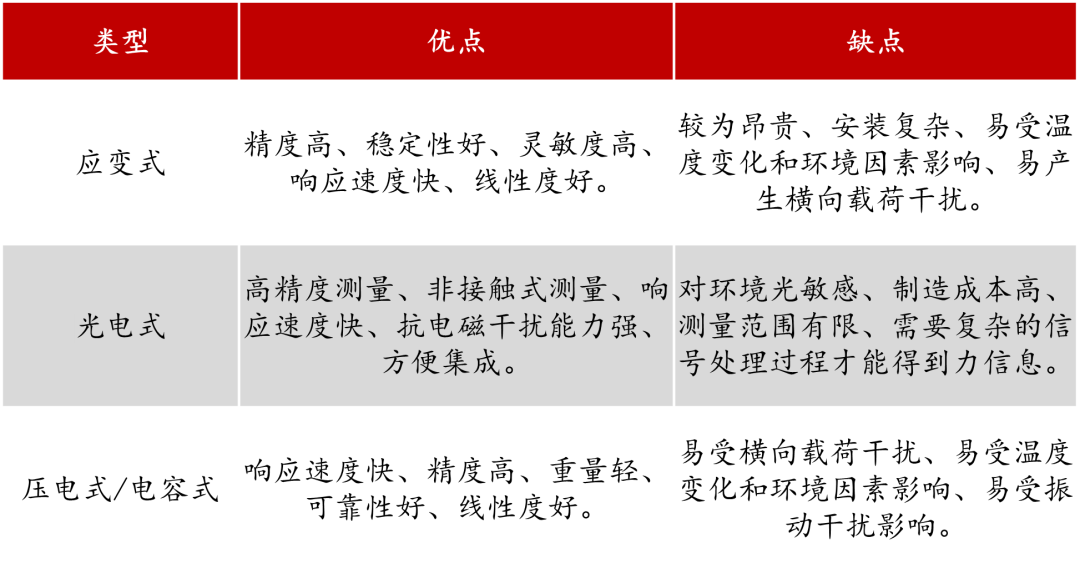
按照测量原理,力/力矩传感器可以分为光电式、应变式、电容式、压电式等多种类型。其中,电阻应变式力传感器凭借技术成熟、精度较高、测量范围广等特点,是当前应用领域较为广泛的一类力传感器。
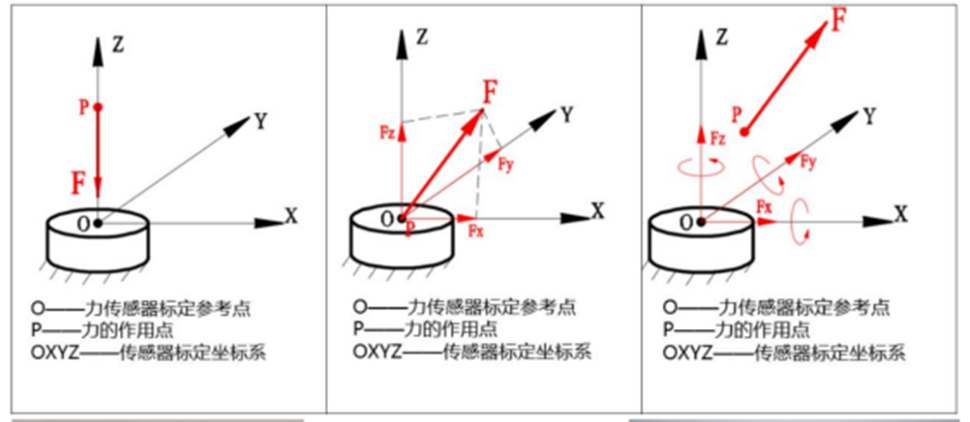
图:不同类型力矩传感器优缺点
资料来源:北斗智慧云,方正证券研究所
3.2.2 力觉传感器技术壁垒极高
六维力矩传感器是性能最优、力觉信息最全面的力矩传感器,但六维力矩传感器技术壁垒极高,涵盖多个方面。
制造难度较高
六维力传感器要考虑多通道信号的温漂、蠕变、交叉干扰、数据处理的实时性,再加之六维联合加载标定的复杂性除了传统力传感器的关键技术外,为了保证六维力传感器的稳定性和精确度,其核心技术包括解耦方法、六维联合加载标定检测系统、降低零点漂移和温度漂移等。
结构解耦设计
六维力矩传感器需同时测量三个方向的力(Fx、Fy、Fz)和三个方向的力矩(Mx、My、Mz),但由于各维度间的力与力矩存在耦合干扰,如何实现精准解耦是核心难题。需通过结构设计(如竖梁、横梁或Stewart并联平台)和算法优化,降低维间耦合误差。例如,结构解耦设计直接影响传感器的灵敏度、刚度和动态性能。
标定与校准技术
传感器在装配过程中所受外部接触力,需要消除六维力传感器系统自身误差以及装配轴重力作用两方面的影响,需要通过标定与辨识算法。标定成本高、周期长,且需解决加载点随机变化带来的误差问题。并且标定程序对于传感器的精度也有一定要求。
高精度信号处理难度高
传感器在使用中面临零点漂移与温度漂移问题,长期使用或环境温度变化时易出现信号漂移,可通过优化材料稳定性和采用算法补偿(如温度补偿电路)来抑制;其抗干扰能力要求在小信号放大、电磁干扰环境下保持高信噪比,这对电路设计和封装工艺要求极高;在动态性能方面,需在高频响应时保证精度,如机器人关节力矩传感器需在毫秒级响应时间内完成数据采集与反馈 。
资料来源:传感器专家网,鸣星制造,德森特传感器,方正证券研究所
3.3 视觉传感器-捕捉信息的途径
机器人视觉传感器是指能够获取物体图像并将其转换为电信号,从而被机器人识别和分析的一类传感器。它主要由图像获取和图像处理两个部分组成。图像获取部分负责捕捉物体的图像,而图像处理部分则负责将图像转换为可以被机器人理解的信息。
机器人视觉可分为二维(2D)和三维(3D)两大类。2D视觉技术主要处理平面图像,通过对二维图像的分析和理解来完成各种任务,每个像素只捕获颜色值及灰度两项数据。3D视觉处理的对象是三维立体空间中的物体和场景。它不仅包含了在X和Y轴上的空间信息,还包括在Z轴上的深度信息。
特斯拉与宇树分别为2D以及3D视觉
特斯拉:BEV Transformer
BEV感知技术成为感知外部环境的标准方法。BEV是Bird’s Eye-View 的缩写,通过神经网络将多个摄像头和传感器收集的信息进行整合,形成基于俯视角度的全景图,同时结合时序信息,动态地感知周围环境并输出结果,以便后续的预测和规划模块使用。驾驶行为是在3D 空间中的行为,BEV通过将 2D透视空间图像转换为3D空间,消除了距离尺度和遮挡问题,使算法能够直观地判断车辆在空间中的位置以及与其他障碍物的关系。Transformer大模型为构建BEV 空间提供了最佳解决方案。BEV空间的构建需要一种合适方法来实现目的,将多个2D 图像和传感器信息综合转化为一个3D 向量空间。特斯拉引入Transformer 算法架构来执行这一转换,通过适应各种输入形式,使得BEV 在自动驾驶领域得以实现。
宇树科技RGB-D立体视觉摄像头
利用深度摄像头(如激光雷达、ToF摄像头)帮助获取3D空间信息,使人形机器人能够识别周围环境中的物体行人和障碍物等,实现避障和导航等功能。
3.4 触觉传感器-精细交互的核心
触觉传感器是机器人感知环境的重要组件,常用于机器人的关节和柔性皮肤等部位。作为视觉传感器的关键补充,其功能与人类皮肤相似,能够精准检测接触力、温度、纹理、接触面积等物理特性,让机器人通过触摸感知物体的形状、质地等物理特性,从而实现更精确的抓取与操作。是实现精细操作、顺畅与外界环境交互的关键所在。触觉传感器可分为压电式、压阻式、电容式、摩擦电式、电感式、光纤式等,其中压阻式、电容式触觉传感器应用较为广泛。
特斯拉Optimus Gen2已部署触觉传感器,可以做到精准力控。Optimus Gen2灵巧手的保持11个自由度并在指尖配置触觉传感器,保留“自适应性(Adaptive grasp)”和“非反向驱动能力(Non-backdrivablefingers)的同时,运动的速度和抓取性能大幅提升,可以做到捏起鸡蛋等精细操作。指尖中阵列触觉传感器的使用是重要增量,可实现精准力控并精准连贯完成大脑下达的命令。
图:五类不同原理的触觉传感器的对比分析
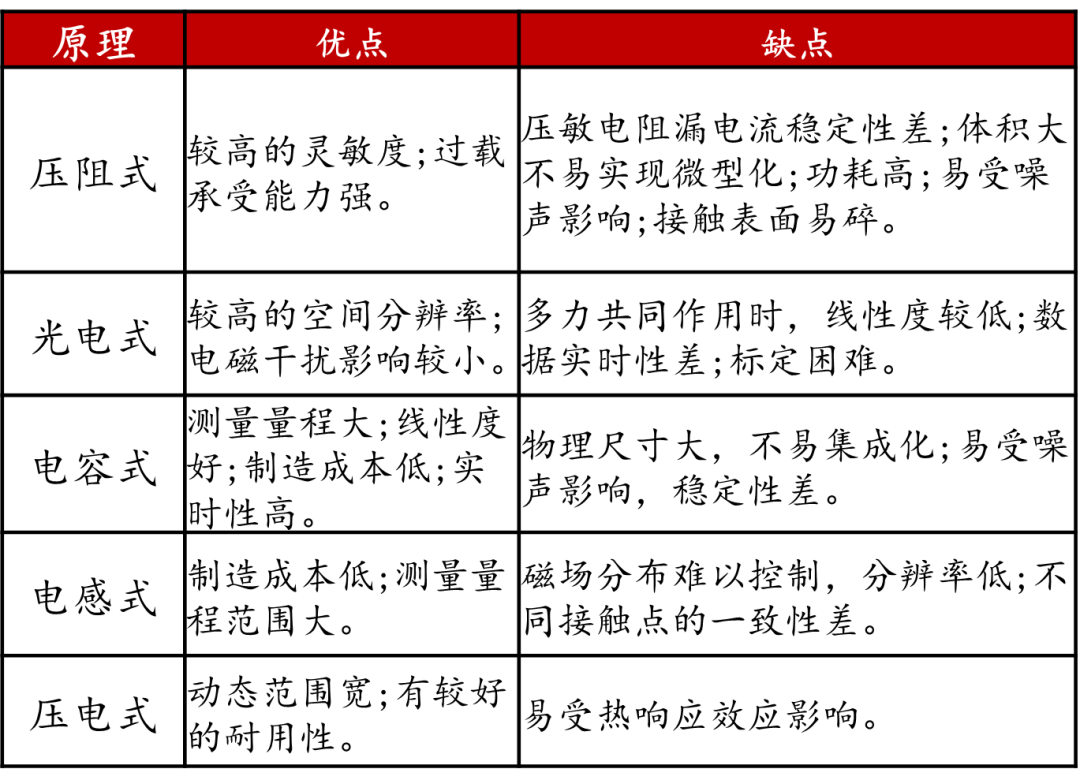
图:Optimus Gen2可实现精准力控
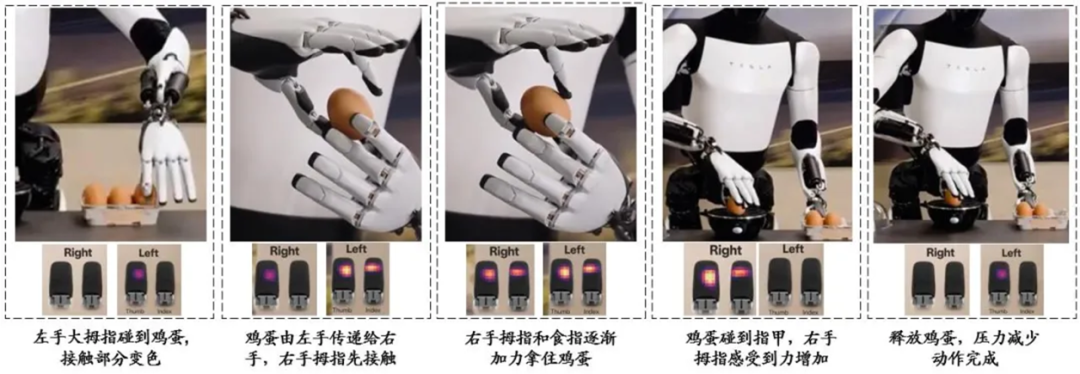
资料来源:中国机器视觉网,方正证券研究所
3.4.1 MEMS压力传感器及电子皮肤为触觉传感器主流技术方向
目前主流的传感器技术路线可分为MEMS压力列阵传感器(刚性传感器)及电子皮肤(柔性触觉传感器)
MEMS压力阵列传感器:主要用于压力测量,并具有阵列式结构。与普通MEMS压力传感器相比,MEMS压力阵列传感器通常包含多个压力传感单元,这些单元以阵列的形式排列,能够同时测量多个点的压力变化,并将检测到的信号转换为可读取的电信号,在需要高空间分辨率和压力分布测量的应用场景中具有显著优势,主要用于灵巧手指尖末端部位,其中压阻式为主要的应用趋势。
电子皮肤:柔性触觉传感器又称为“电子皮肤”,是利用柔性材料的物理特性,将外部的力学量转换为电信息,从而实现对触觉感知的传感器产品。能够实现与环境接触力、温度、湿度、震动、材质、软硬等特性的检测,是机器人直接感知环境作用的重要传感器。柔性触觉传感器具备人类皮肤的柔韧性,可以适应任意载体形状,更利于测量物体表面受力信息、感知目标物体性质特征。柔性触觉传感器主要由基底材料、电极材料、功能层材料构成。基底材料是柔性触觉传感器的基础,是决定传感器弹性形变性能的关键因素。电极材料主要用于传输电信号。功能层材料则是传感器的核心部分,能够将外部的力、温度、湿度等物理量转化为电信号。
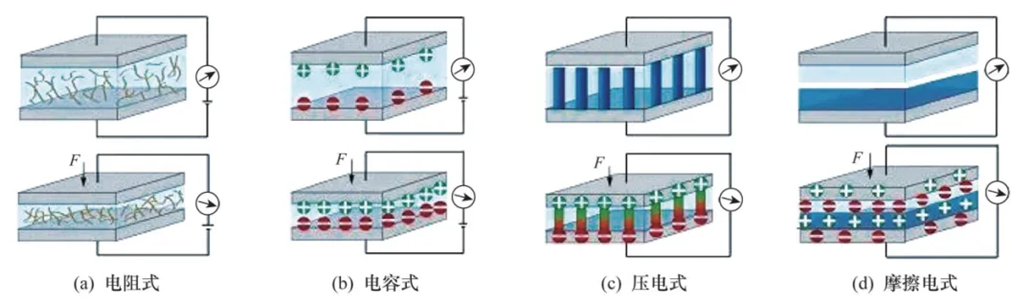
图:生物系统中触觉感知的示意图&机器人手部分集成了PR电子皮肤示意图
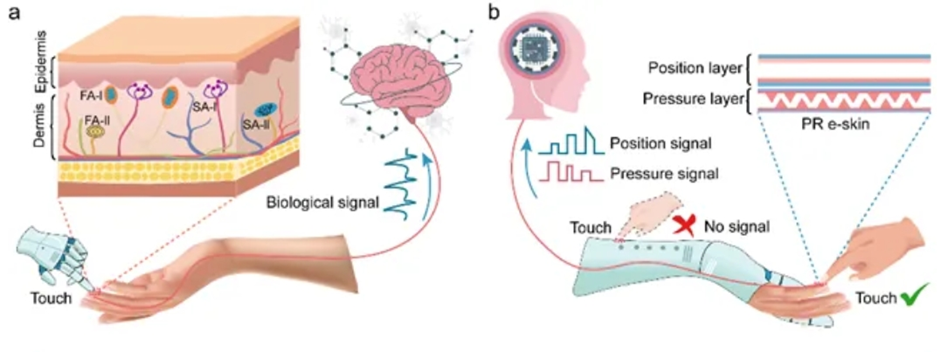
资料来源:《机器人触觉传感器发展概述》,“A Programmable Electronic Skin with Event-Driven In-Sensor Touch Differential and Decision-Making”,方正证券研究所
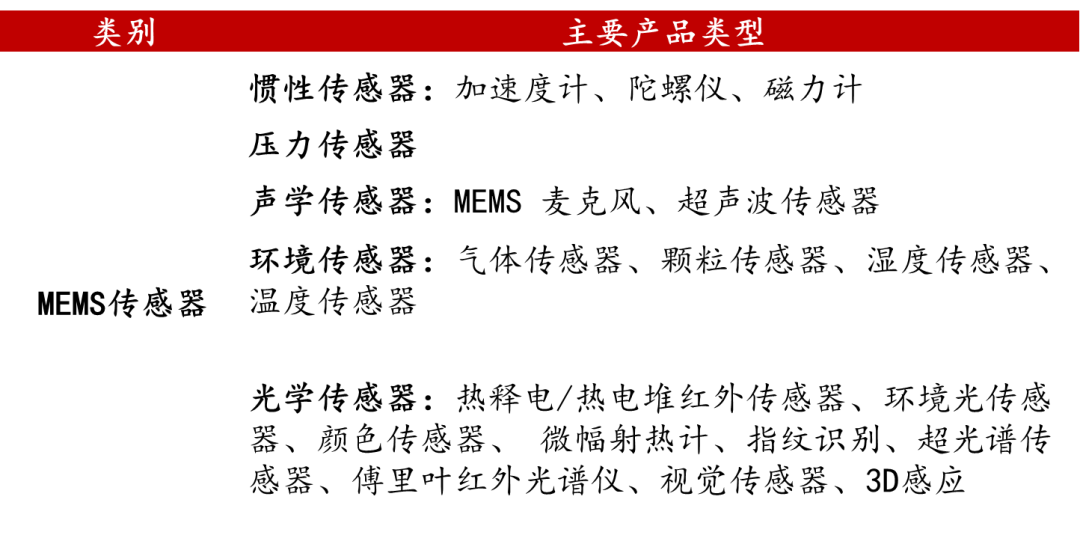
3.5 MEMS传感器–感知层面的重要部件
MEMS传感器具有微型化、智能化等优势,有望成为人形机器人传感器未来发展方向。MEMS,微机电系统(Micro-Electro-Mechanical System),是利用大规模集成电路制造技术和微加工技术,把微传感器、微执行器、微结构、信号处理与控制电路、电源以及通信接口等集成在一片或者多片芯片上的微型器件或系统。其中,MEMS传感器可以感知和测量物体的特定状态和变化,并按一定规律将被测量的状态和变化转变为电信号或者其它可用信号,并针对特定可测量的输入为用户提供一种可用的能量输出。MEMS传感器凭借其低成本、高可靠性、微型化、智能化、高集成度等优势,符合人形机器人对于感知能力智能化的需求。
MEMS行业全球市场规模预计于2027年达到223亿美元,国内市场增速高于全球。根据Yole 的统计和预测,全球MEMS 行业市场规模将从2021 年的136 亿 美元增长到2027年的223亿美元,2021-2027年复合增长率为9.00%。国内MEMS行业市场增速快过全球。根据赛迪顾问数据整理,2020年中国MEMS市场保持快速增长,整体市场规模达到736.7亿元,同比增长23.24%,增速持续高于全球。预计2022年中国MEMS市场规模将突破1000 亿元,2020-2022年复合增长率为19.06%。
MEMS惯性传感器全球市场空间预计于27年达到49.43亿美元,国内市场有望实现高速增长。MEMS惯性传感器分为加速度计、陀螺仪、磁力计及惯性传感组合(IMU)。根据YoleIntelligence的统计,全球MEMS惯性传感器的市场规模有望从2021年的35.09亿美元、39.39亿颗,增长至2027年的49.43亿美元、60.60亿颗,市场规模和颗数复合增长率分别为5.88%和7.44%。近年来受益于自动驾驶、高精度导航、人形机器人等下游产业的旺盛需求,国内对陀螺仪、IMU等高性能MEMS惯性传感器的需求高速增长。根据芯谋研究数据,中国MEMS惯性传感器市场规模有望由2021年的65.4亿元增至2027年的125.7亿元,CAGR11.5%。在人形机器人领域,陀螺仪、惯性传感组合(IMU)有望成为核心产品。
陀螺仪:MEMS陀螺仪是第三代陀螺仪的代表,相较于激光、光纤等前代陀螺仪具有小型化、高集成、低成本的优势,将逐渐替代激光、光纤等传统陀螺仪。MEMS陀螺仪基于科里奥利效应,通过检测质量块在旋转时产生的振动位移,高频输出机器人绕X/Y/Z轴的角速度数据,快速计算机器人重心偏移,调整关节力矩以维持平衡,帮助机器人实现实时姿态反馈、步态规划与调整、关节协调稳定等功能。
惯性传感组合(IMU):IMU通过集成加速度计、陀螺仪及磁力计,能够测量物体在三维空间中的角速度和加速度。通过误差补偿和惯性导航解算,IMU最终能够输出载体相对于初始位置的坐标变化量、速度等重要导航信息。实时感知机器人的运动状态和姿态变化,是实现动态平衡、精准动作控制及自主导航的关键部件。人形机器人中IMU的用量通常在到2-4个左右,分别配置在头部、双足和胯部等关键部位。目前,特斯拉Optimus、波士顿动力Atlas、智元机器人的远征A1、优必选WalkerX、宇树机器人H1以及小米的CyberOne等都内置了IMU来实现精确的肢体动作控制。
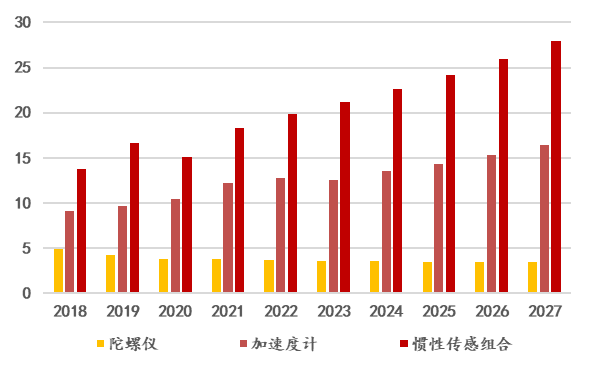
图:2018-2027E中国MEMS惯性传感器行业市场规模(亿元)
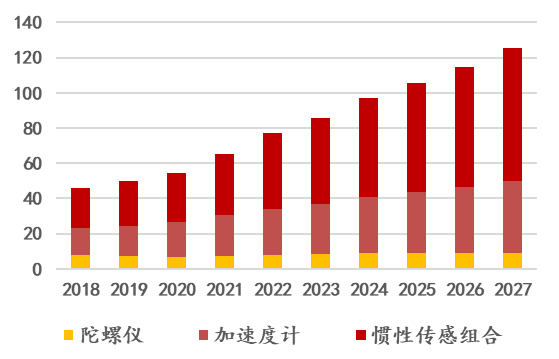
图:优必选人形机器人Walker X搭载高精度IMU
资料来源:YoleIntelligence,芯谋研究,优必选,方正证券研究所
3.5.2 MEMS惯性传感器市场被海外龙头垄断,国产替代正当时
MEMS惯性传感器市场份额主要被海外龙头占领,国产替代空间可观。根据Yole 统计的数据,2021年,MEMS惯性传感器市场主要由博世,Honeywell,ADI等国际大厂占据。MEMS加速度计、MEMS陀螺仪、IMU市场的前五大厂商分别占据各自市场的84%、83%、88%。而2021年全世界高性能MEMS惯性传感器市场规模约71,000 万美元,C3分别为Honeywell、ADI以及Northrop Grumman/Litef,合计占有50%以上的份额。2022年,中国MEMS惯性传感器市场主要被博世、ST等国际龙头厂商占据,IMU领域,国际厂商占据垄断地位。前三名国际厂商共占据近80%市场份额,前五名国际厂商共占据超90%市场份额,国产替代空间较大。
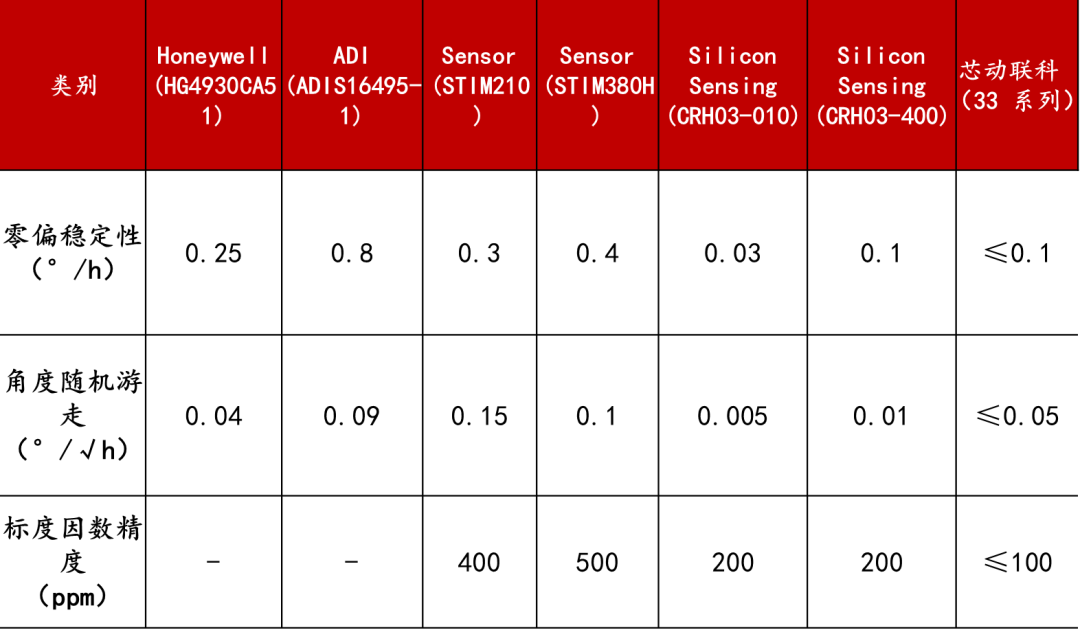
国内高性能MEMS陀螺仪的核心性能指标已超过部分国际龙头厂商相应产品。对比国际上技术最先进的的高性能MEMS陀螺仪Honeywell、ADI及SensorSTIM380H为IMU产品内的陀螺仪),芯动联科33系列陀螺仪在零偏稳定性、角度随机游走及标度因数精度(三种指标分别对应自主导航时间、姿态控制系统精度、动态输入下测量精度,数值越小性能越优秀)上已经超过大部分厂商。相较于已经实现量产的硅基MEMS陀螺仪中性能最优的Honeywell HG4930CA51及Sensor STIM210,国内总体能力已经处于国际领先水准。

图:2022年中国MEMS加速度计及IMU市场前五大企业

图:国内高性能MEMS陀螺仪技术处在世界领先水准
资料来源:YoleIntelligence,芯谋研究,明皜传感招股说明书,各公司官网,芯动联科招股说明书,方正证券研究所
4.1 灵巧手是“五脏俱全”的独立硬件模块,追求一定边界条件下的灵巧、力量、精度的提升
4.1.1 灵巧手是人形机器人对外交互的重要窗口,包含驱动/传动/感知三大细分模块
灵巧手是末端执行器的细分品类,在训练数据易得性、环境适应性等方面更具优势,是人形机器人的重要组成部分。灵巧手是典型的抓手类末端执行器,其形态和功能均类似人类手部,能够进行抓取、捏取等精细多样的操作,是人形机器人与外界环境实现较好交互的重要窗口。手是人类与外界交互的重要渠道,人类的生活、工作环境均基于人手特点而相应构建,因此类似人手的灵巧手架构可利用动作捕捉得到的人手运动数据进行模仿学习、强化学习等训练,从而在远期面对不同环境、不同物件时具有更强的泛化、适应能力,较夹持器、非仿人灵巧手等其他末端执行器具备更强的环境适应性。
灵巧手的硬件模块包括三部分:驱动系统、传动系统及感知系统。驱动系统的核心作用是产生运动和力,传动系统将运动和力从驱动系统传导至灵巧手各关节,感知系统提供灵巧手内部的运行状态及外部环境感知反馈。根据不同应用场景的特定需求,在驱动结构、驱动方案、传动部件等方面存在多类不同方案。
图:灵巧手是末端执行器的一种
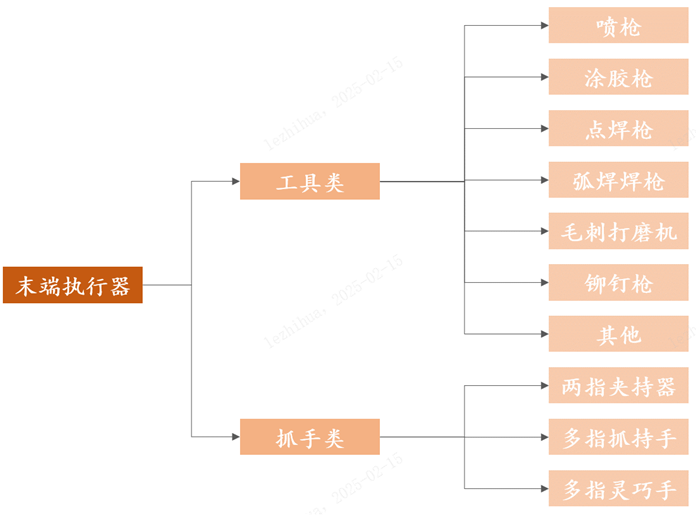
图:多指灵巧手架构更复杂,但灵活性、自由度等更高

资料来源:蔡世波等《机器人多指灵巧手的研究现状、趋势和挑战》,方正证券研究所
4.1.2 灵巧手在一定边界条件下追求“灵巧性、抓握力、精度”的提升
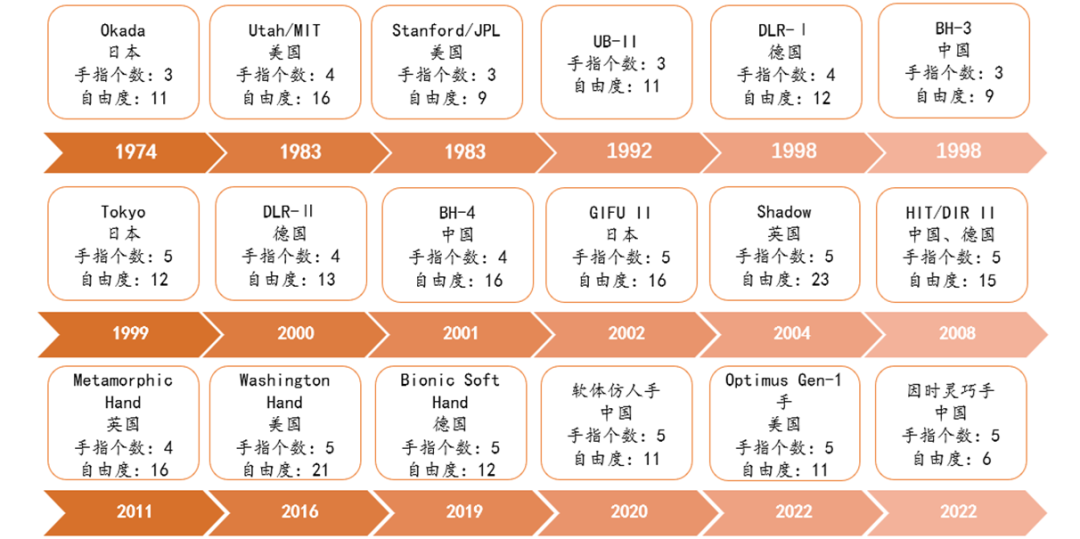
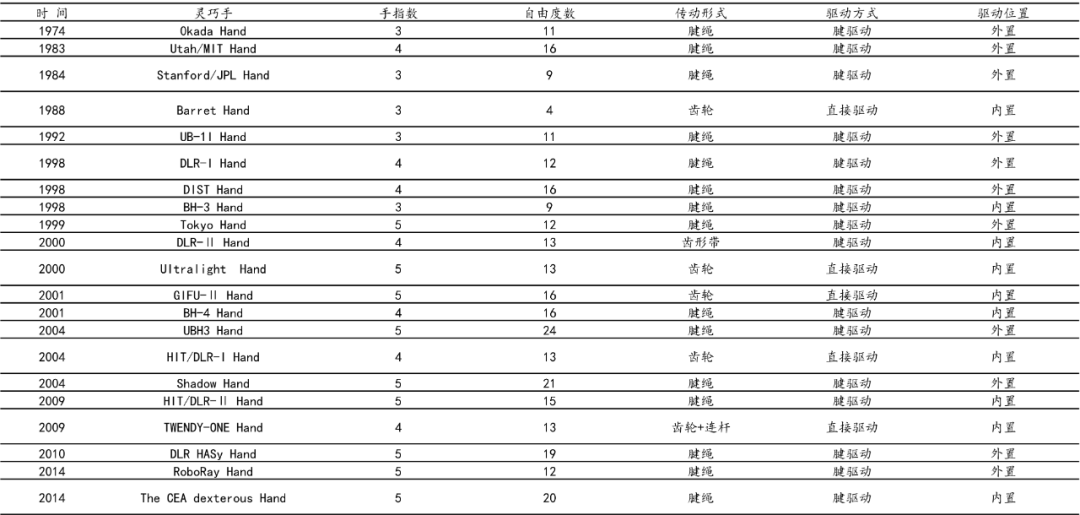
灵巧手诞生自上世纪70年代,朝着多自由度、集成化、仿生化发展。灵巧手概念自20世纪70年代产生,随着计算机技术等领域的发展,朝着集成化、智能化、灵巧化方向持续迭代。灵巧手应用广泛,已在医疗、航空航天、工业等领域实现应用。
1970s之后,灵巧手概念随工业领域发展而兴起:日本电工实验室于1974年推出的灵巧手Okada是现代意义上第一款灵巧手,配置3个手指、11个自由度,能进行连续抓取运动。麻省理工学院于1983年推出的Utah/MIT、斯坦福大学1984年推出的Stanford/JPL均采用手指完全相同的模块化结构设计,且灵活性提升,为未来灵巧手研发打下基础。
1990s之后,灵巧手驱动、控制、感知能力提升,集成化发展:计算机技术水平提升为灵巧手信号处理能力、控制算法计算能力的提升提供可能,灵巧手向集成化设计发展。在此期间UB-II Hand、DLR-I Hand、DIST-Hand、BH-3Hand等新型号层出不穷。
2000s之后,灵巧手持续迭代,性能强化:德国宇航中心在DLR-I Hand的基础上推出DLR-II Hand,其驱动-传动系统进一步优化,指尖输出力从10N增至30N,具备集成度高、多传感器等特点,主要面向家庭、航空航天领域。哈尔滨工业大学联合德国宇航中心推出HIT/DLR-I Hand,采用盘式电机驱动及谐波减速器 齿形皮带的传动方案。
图:灵巧手发展历程
资料来源:吕博瀚《空间机器人多自由度灵巧手关键技术研究》、刘伊威《机器人灵巧手的研究与发展》、方正证券研究所
灵巧手的硬件架构底层逻辑在于小体积/重量、低成本、耐用可靠的边界条件下追求“灵巧性、抓握力、精度”的提升。与通用自动化部件不同,人形机器人驱动器的硬件设计和制造需要适应小空间下的集成需求和功率密度需求。结合应用场景、对外交互等因素,我们认为灵巧手的硬件架构选择核心在于在小体积&重量、低成本、可靠耐用的边界条件下,追求灵巧性、抓握力、精度的提升。在现有硬件技术条件下,【灵巧性、抓握力、精度】这三者需求往往存在互斥的情况,需要根据应用场景、远期优化空间等因素综合考量。
4.1.3 特斯拉方案演进:增加自由度与传感单元是趋势,最新款灵巧手自由度与人手基本相当
从解剖结构来看,人手由27块骨头构成,分为腕骨、掌骨和指骨:
腕骨(CMC):由8块骨头构成,负责手掌和手指的整体运动。
掌骨(MCP):由5块骨头构成,连接腕骨和指骨,为抓握物体提供支撑。
指骨(IP):由14块骨头(拇指*2 其余四指各自*4)构成,负责抓握物体和做手势,是人手最重要、复杂的部分。
图:人手骨骼构成
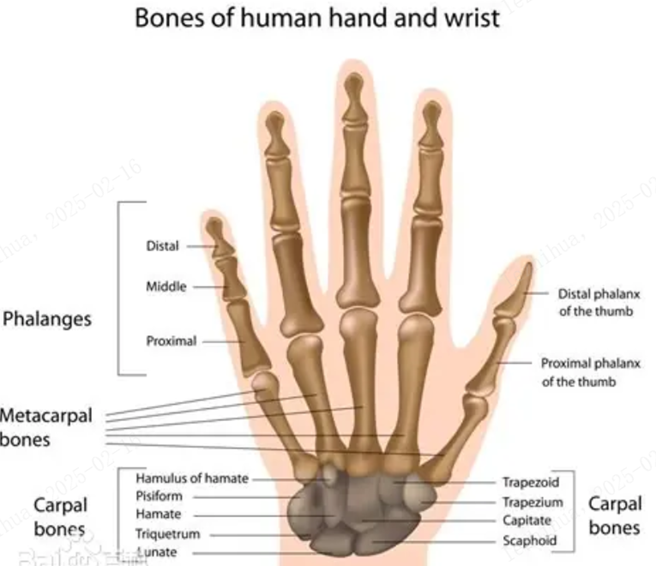
资料来源:百度百科,方正证券研究所
人手合计包含24个自由度,其中拇指、食指和中指的重要性较高。自由度方面,人手合计有24自由度,其中除拇指之外的其余四指各自具有4自由度(弯曲/伸展*3 外展/并拢*1),拇指具有5自由度(弯曲/伸展*2 外展/并拢*1 掌骨节/旋转*2),手掌具有1自由度(外展/并拢*1),手腕外展及曲度合计2自由度。根据《高仿生性能假肢设计研发及应用研究》,力量抓握、精捏、侧捏占到人手常用动作的85%,因此拇指、食指及中指具有较高重要性,在灵巧手设计中应分配更多的自由度。
图:Feix分类法三类抓握姿势
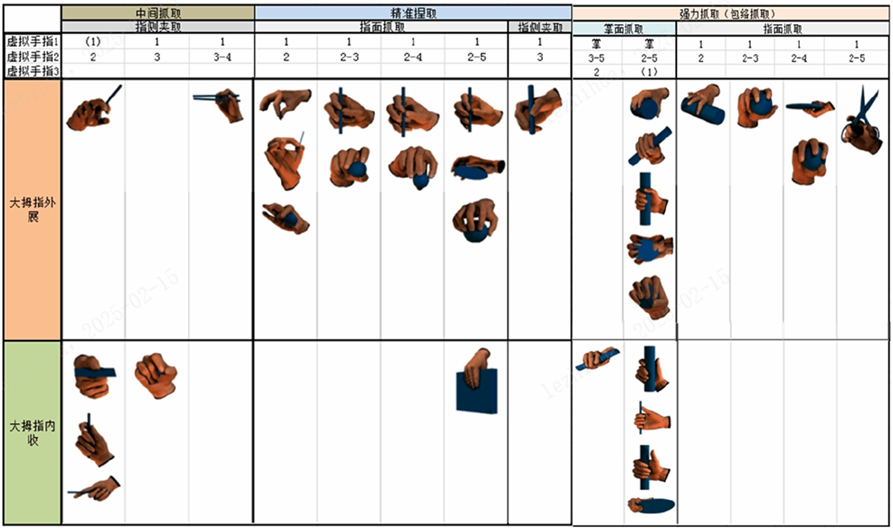
图:人类常用动作及比例
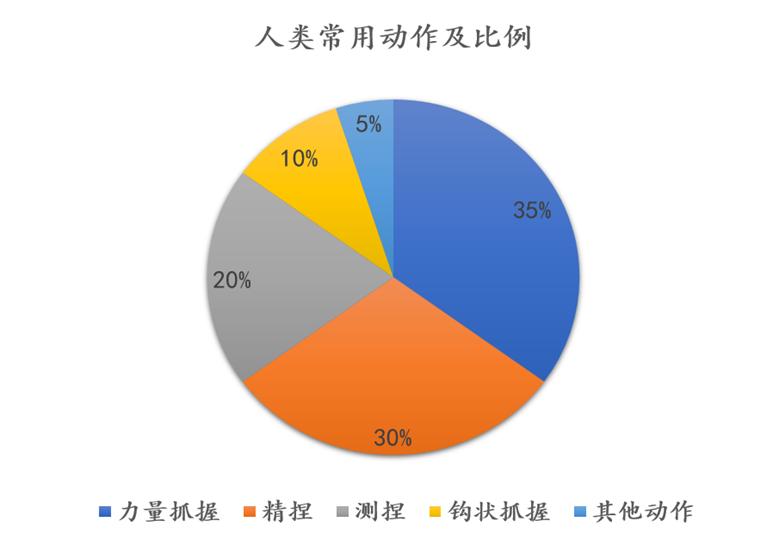
资料来源:林辉煌《协同欠驱动仿人灵巧手设计方法研究》,郑悦《高仿生性能假肢设计研发及应用研究》,方正证券研究所
特斯拉Optimus是目前全球人形机器人行业标杆,通过复盘知其灵巧手历经多轮架构调整,核心主线是增加自由度、增加感知能力,从而带来硬件结构的变化:
GEN1方案实现“从0到1”,采用经典的单手6执行器11自由度架构。根据TESLA AI DAY 2022,Optimus-Gen1灵巧手采用欠驱动架构(单手11自由度,6执行器),其中拇指采用2个执行器分别实现弯曲/伸展、外展/内收运动,非拇指的四个手指各自采用1个执行器,五指末端关节不搭载执行器,进行耦合随动。执行器方案为【空心杯电机-蜗轮蜗杆-腱绳】。凭借对蜗轮蜗杆的使用,其具有防反驱特点。
图:特斯拉Gen1灵巧手架构

图:特斯拉Gen1灵巧手工作原理

资料来源:Tesla AI Day 2022,方正证券研究所
GEN2方案新增“手指触觉传感器”。根据2023年12月特斯拉官媒,Optimus-Gen2灵巧手在Gen1基础上,手指部位新增触觉传感器,从而在操作的连贯性、精细程度上取得显著进步,可用拇指、手指捏取鸡蛋。
024年10月We Robot会议结束后,特斯拉展出Gen3灵巧手,其具备22自由度(五指*4自由度 拇指/小指根部的对掌关节各一个),结合运动学原理,我们判断单手或采用17执行器,从而具备更强的灵活性,自由度基本接近人手水平。从细分硬件架构上,预计或有如下变化:
驱动&传动模块:采用【电机 丝杠】或【电机 减速器 丝杠】方案,集成于前臂,从而为手部预留更多空间,在此背景下,成本更具优势的无刷电机的体积劣势收窄,在手部的用量显著提升。其中蜗杆被负载、定位精度更高的丝杠替代。由于采用外置式方案,腱绳被广泛应用。
感知模块:根据特斯拉官媒,Optimus机器人在Gen3灵巧手加持下接住飞来的网球,我们预计手掌或新增压力传感器以提升抓握稳定性。
图:特斯拉Gen2灵巧手在手指部位采用触觉传感器
图:特斯拉Gen3灵巧手合计22自由度
图:Optimus采用Gen3灵巧手可抓取飞行中的网球

资料来源:《特斯拉灵巧手硬核深度解析》,财联社,方正证券研究所
百万台量产下,灵巧手市场规模或将超400亿元,带动各细分部件需求增长。根据特斯拉24Q4业绩会,内部规划Optimus于25年量产10000台并于26H2实现对外交付,产能端按1000台/月-1万台/月-10万台/月的节奏持续推进,在百万台销量背景下,单人成本预计低于2万美元。我们认为人形机器人逐步走向量产,规模效应叠加技术工艺优化下,各零部件成本均将显著降低。我们假设Optimus Gen3灵巧手采用17个电机/丝杠及34根腱绳,初步测算得百万台产量下对应灵巧手市场空间428亿元,其中电机、丝杠对应规模超百亿元。
图:特斯拉Optimus Gen3灵巧手细分零部件价值量及市场空间测算(假设单个机器人采用2个灵巧手)
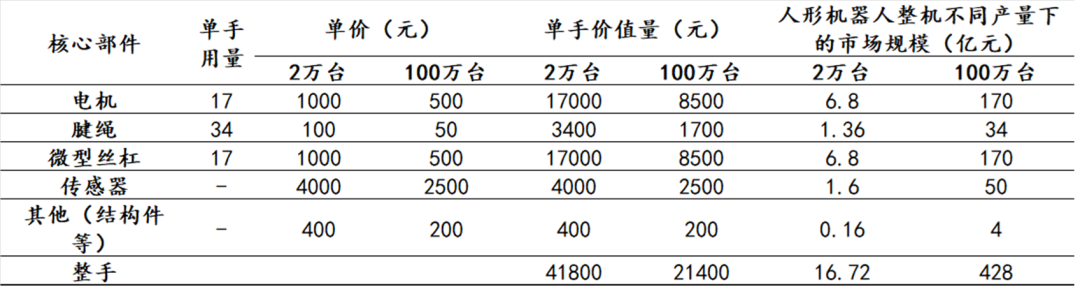
资料来源:方正证券研究所,注:现有主流灵巧手方案仍存较大变动、提升空间,以上测算仅供参考
4.2 驱动系统:电驱方案为主流,空心杯电机及无刷有齿槽电机或为主要选择
驱动系统是力量之源,产生运动和力,在驱动结构、放置方式、方案选型等方面均存在不同技术路线,但当前方案基本采用欠驱动下的电机方案。落实到电机选型上,可选方案包括直流无刷电机、空心杯电机及无框力矩电机,需根据不同场景的需求进行相应配置。
4.2.1 驱动结构:可分为全驱动/欠驱动结构,欠驱动方案应用更广泛
根据自由度、驱动源数量的关系,灵巧手驱动结构可分为全驱动及欠驱动:
全驱动灵巧手的驱动源数量等于自由度,操作更精巧,但体积、重量、成本存在劣势:全驱动灵巧手的所有关节均单独配置驱动器,每个手指关节均能独立控制,整手具备更强的精细操作能力。但全驱动结构下,驱动器等硬件零部件用量更大,整手成本更高、结构复杂、体积更大。
欠驱动灵巧手的驱动源数量少于自由度,在牺牲控制精度的情况下实现更优的体积、重量、成本,应用更为广泛:欠驱动灵巧手存在部分不配置驱动器的关节(多位于手指末端),进行耦合随动。该结构下驱动器少,结构简单下体积相应较小,成本也较低,且抓取包络性好。但对应的,欠驱动灵巧手的控制精度也较低。
图:全驱动灵巧手和欠驱动灵巧手对比
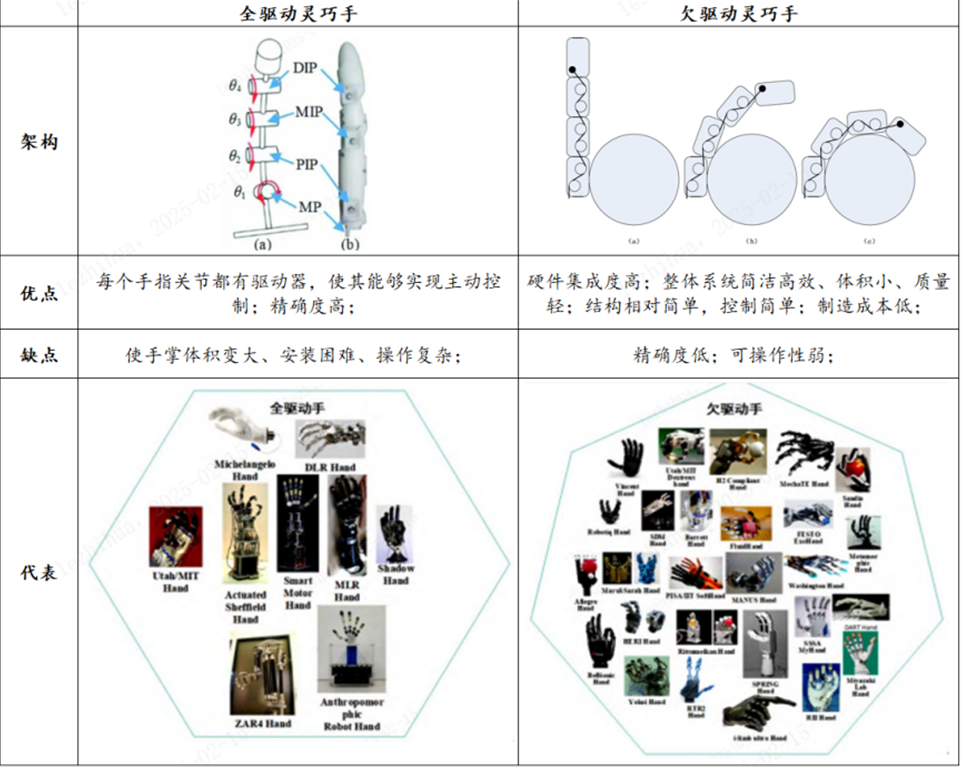
资料来源:吕博瀚《空间机器人多自由度灵巧手关键技术研究》、刘伟等《机器人灵巧手研究综述》等,方正证券研究所
4.2.2 放置方式:外置、混合置或为短期优解
按照驱动系统安装位置的差异,可分为:外置、内置、混合置。在现有电机技术下,内置方案下执行器数量增长往往对应着灵巧手本体重量及体积的增加,因此我们认为短期来看外置、混合置或为较优解,但未来随着驱动/传动系统出现新技术变革,内置亦有广阔发展空间。
外置是早期主要方案,但存在难控制、难维护等问题:外置方案下,驱动系统安装于灵巧手外部,需要用腱绳连接驱动源与手指末端,可将灵巧手本体做小,采用体积、力矩更大的电机,但传感器难以直接测量手部状态,非模块化设计也导致后期维护困难。
内置随技术发展而逐步应用,但在自由度提升趋势下,可能会导致手部体积、重量的提升:即驱动系统安装于灵巧手内部,解决了外置存在的系列问题,但手部体积、重量有所提升。
混合置结合内置、外置方案的优点,但仍需采用腱绳传动:驱动系统在本体及前臂均有安装,此模式下能够结合内置、外置的优势,在提升手指输出扭矩的同时减少本体体积,但由于部分执行器距离关节的位置较远,仍需采用腱绳传动。
图:不同驱动方式下,灵巧手重量与执行器数量正相关
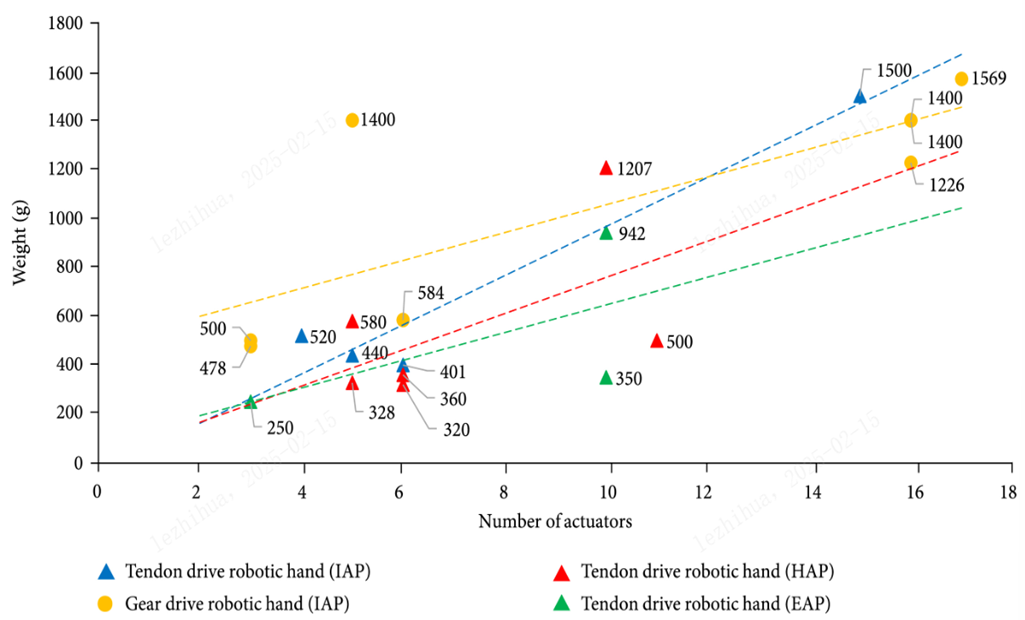
资料来源:《Survey on Main Drive Methods Used in Humanoid Robotic Upper Limbs》,方正证券研究所
4.2.3 方案选型:电机驱动更契合灵巧手的需求,为当前主流方案
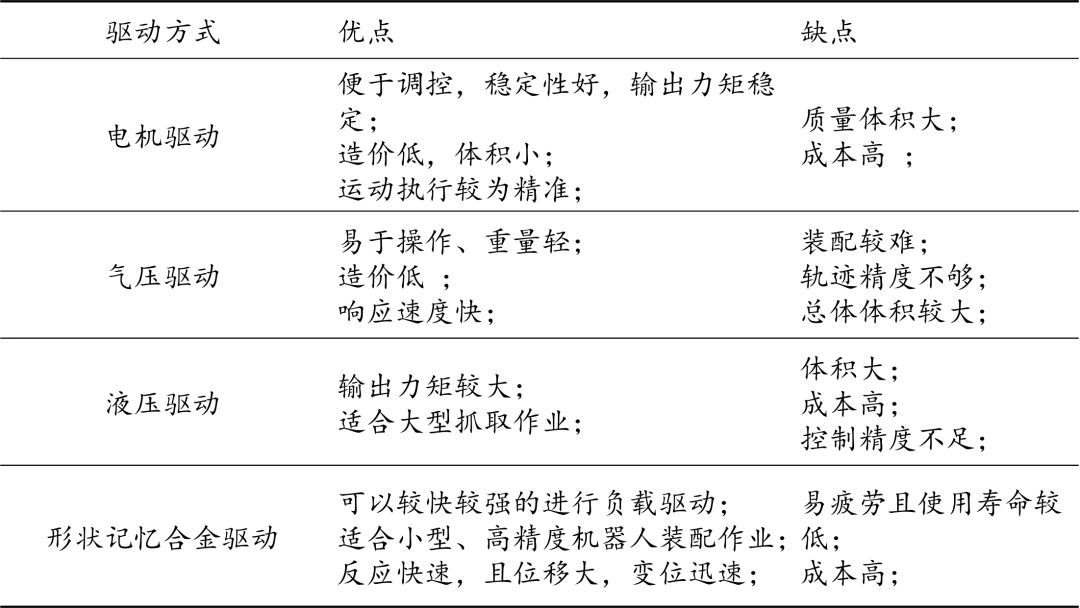
电机驱动是当前时点最优方案,应用最为广泛:电机驱动通过电机产生力/力矩,直接或通过传动机构将力传导至关节促其运动。在电气化率提高背景下,电能获取及储存相对容易且电-力的转化技术相对成熟,电机具有输出力矩稳定、精度较高、响应迅速、体积较小等优势,是当前时点的最优驱动方案,包括特斯拉、Figure、智元等在内的主流主机厂均采用电机驱动方案。针对人形机器人第一性原理,电机未来或朝着减重、提功率密度等方向发展。
气压驱动在精度、稳定性、体积存在一定劣势:气压驱动通过压缩空气产生的压强差作为动力源,兼具低成本、操作简易、响应迅速、柔性强等优势,但气压受温度、海拔等因素影响,因此精度、稳定性相对受限,且该方案下的大体积架构不利于远期集成化发展。
液压驱动输出力矩大,但同样在精度、体积等方面受限:液压驱动通过液体介质的静压力作为动力源实现驱动,输出力矩大。但其在体积、稳定性、液体泄漏/后期维护等方面存在劣势。
形状记忆合金驱动是新兴技术路线,在灵巧手应用相对较少:该方案通过变化温度来对形状记忆合金的形状、机械性能形成影响,其中镍钛记忆合金材料应用最广泛。其兼具位移大、功率重量比高、方向灵活度高等特点,但在成本、寿命等方面受限,更适用于高速/高精度/小负载的装配场景。
图:灵巧手不同驱动方式的优缺点
资料来源:严玺《仿人灵巧手的结构设计及控制研究》、刘伟等《机器人灵巧手研究综述》、蔡世波等《机器人多指灵巧手的研究现状、趋势和挑战》,方正证券研究所
4.2.4 电机选择:可选方案包括直流无刷电机、空心杯电机及无框力矩电机
直流无刷电机使用寿命、成本更优,但响应速度慢、体积大,适用于高功率密度、高负载的场景:其转子结构更稳固,因此在稳定性、寿命更具优势,但其转动惯量较高,因此响应速度慢于空心杯电机。
空心杯电机的核心优势在响应迅速、能量转换效率高,但成本、输出扭矩存在劣势,适用于快响应、空间/能耗要求高的场景,是当前机器人电驱方案的主要选择:是微型伺服直流电机的一种,其最大特点是采用无铁芯转子,消除铁芯形成涡流而产生的电能损耗影响,同时重量、转动惯量显著更小,在响应速度、功率体积比、运行精度、效率等方面具备优势,能量转换效率普遍超85%。但在输出扭矩等方面较其他两种方案存在劣势,所以常需要行星齿轮箱以提升扭矩,同时其杯型绕组成型工艺复杂,产品良率、成本存在劣势。
无框力矩电机:其可直接耦合,无需齿轮等传动装置即可驱动负载,具有低转速、大扭矩的优势,较空心杯电机具有一定成本优势。
图:空心杯电机、无刷电机及无框力矩电机的性能对比
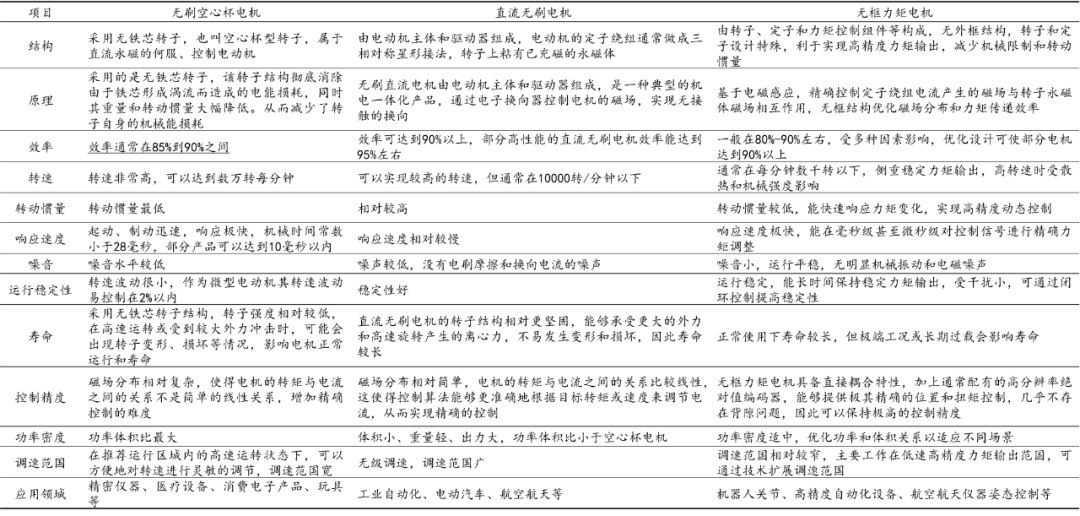
资料来源:立鼎产业研究院,WEG电机官网,电子发烧友,方正证券研究所
4.3 传动系统:腱绳为主流方案,微型丝杠、微型谐波产业进程提速
传动系统将运动和力从驱动系统传导至灵巧手各关节,对灵巧手抓取的稳定性、精度、灵活性具有重要作用。传统系统按传动级别可分为三级。其中一级传动主要用于增强扭矩、提升精度,以蜗轮蜗杆、减速器为主;二级传动包括齿轮、丝杠等;三级传动用于连接关节末端与驱动系统,包括腱绳、连杆等。
传动系统分歧较大,预计腱绳或为未来主要方案,微型丝杠、微型谐波减速器有望随技术成熟而广泛应用。齿轮、连杆、腱绳为传统的传动方式,灵巧手早期广泛应用齿轮、连杆作为传动机构,但二者均存在体积/重量大、柔性程度较差等问题,腱绳成为当前主流方案。而微型丝杠、微型谐波减速器为新兴传动结构,在精度、承载力等方面各具优势,随产业成熟推动降本后或广泛应用。
图:灵巧手主流传动方案的定义及优缺点概览
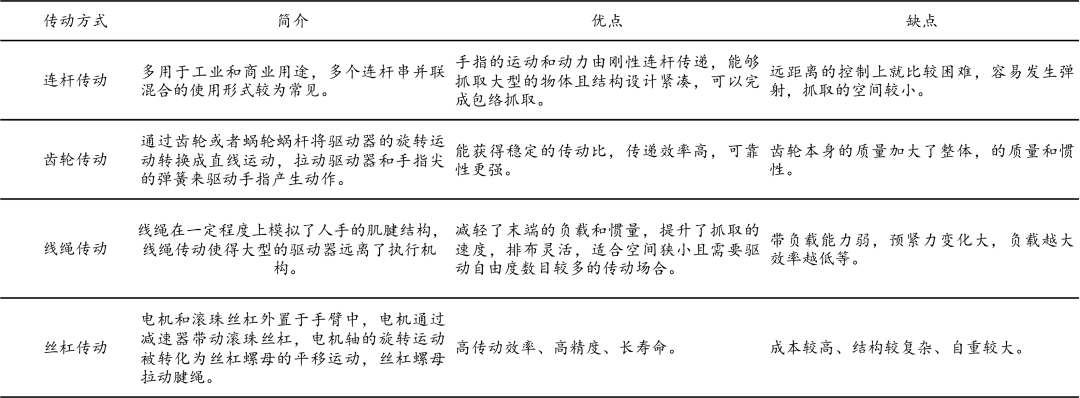
资料来源:刘伟等《机器人灵巧手研究综述》,方正证券研究所
4.3.1 齿轮/连杆传动:传统的传动方案,存在重量/体积大等问题
齿轮传动兼具稳定性、精度、寿命等优势,但重量、成本较高。原理是将电机旋转经由齿轮传动化为直线运动,再通过拉动弹簧来驱动手指运动,在工业机器人等领域广泛应用。其具有精准度高、稳定性强、寿命高等优势,但结构复杂使得重量、成本较高。根据齿形不同,齿轮可分为直齿轮、锥齿轮和涡轮,其中直齿轮应用最广泛、安装最容易,可实现较大的减速比和扭矩比;锥齿轮可改变传动方向,有传动平稳、噪音小、承载力强等优势;涡轮的核心优势在于在实现最小空间的同时实现较大的运动传动比,且兼具自锁性。
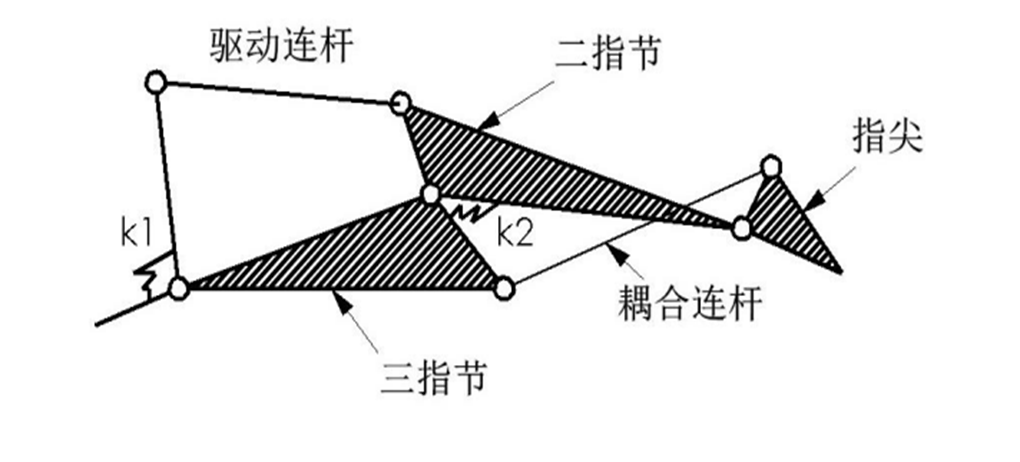
连杆抓取速度较快、承载能力大,但结构复杂、柔性化程度较低。部件包括直线的驱动连杆和耦合连杆,以及复位弹簧,原理是通过多个连杆串并联的形式传递力和运动,在工业、商业(如假肢)等领域均有应用。由于传动部件为连杆,因此其刚性较强,此外还兼具抓取速度快等优势。但其结构复杂、柔性化不足。
图:齿轮传动原理
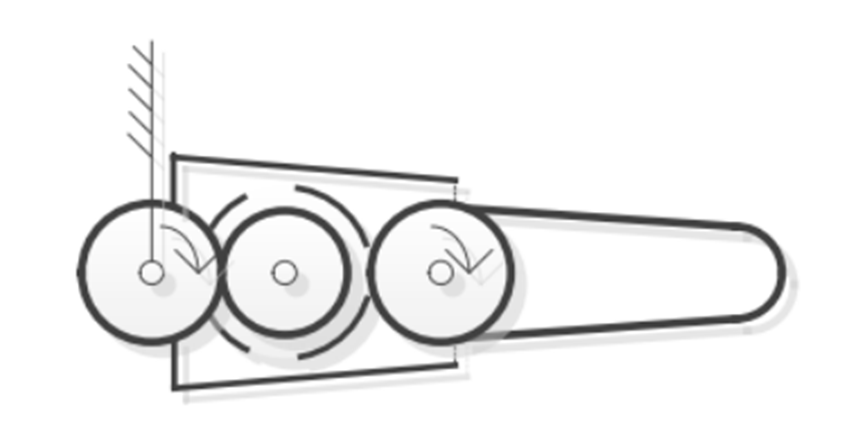
图:连杆传动原理
资料来源:严玺《仿人灵巧手的结构设计及控制研究》,方正证券研究所
4.3.2 腱绳传动:多自由度趋势下的必然选择,有望随材料性能提升而广泛应用
腱绳兼具远距传动、灵活柔性等优势,可为传感器等部件预留更多空间,是当前应用较多的传动方案,但在寿命、负载、精度等方面尚存较大改善空间,或搭配其他传动机构以实现更优的综合效果。在腱绳传动中,通过丝杠将电机旋转运动化为直线运动,腱绳一段拉着丝杠螺母,另一端连接灵巧手手指,从而实现手指绕关节轴的转动。腱绳传动方案下驱动器与执行器可保持较远距离,减轻执行器末端的负载和惯量,同时手指运动的柔性程度较好。此外,腱绳可与丝杠、蜗轮蜗杆等其他传动方案配合使用,实现小空间下的多自由度运动。但腱绳在负载、执行精度、寿命等方面有较大提升空间,且预紧力不稳。
图:腱绳传动原理
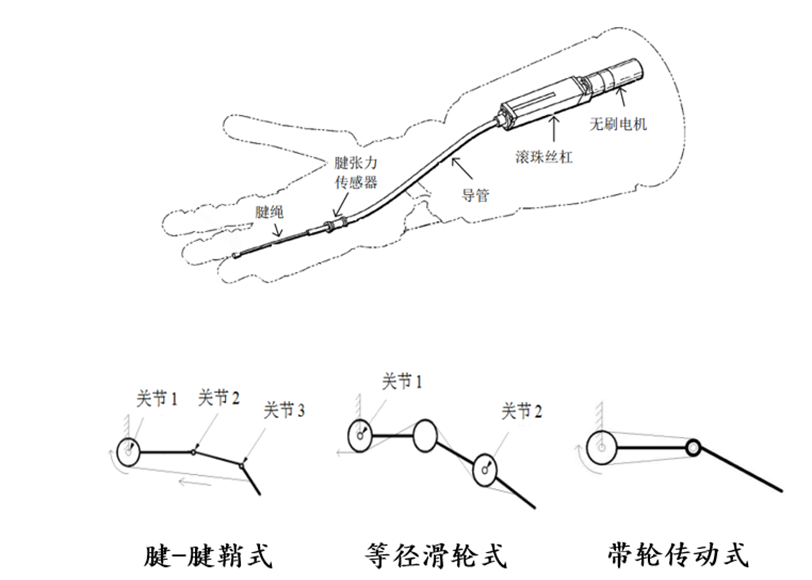
图:腱绳驱动方案在灵巧手中广泛应用

资料来源:韩如雪《腱驱动空间多指灵巧手感知与控制关键技术研究》、严玺《仿人灵巧手的结构设计及控制研究》,刘伟等《机器人灵巧手研究综述》,方正证券研究所
图:代表性灵巧手多采用腱绳传动
资料来源:孙成远《腱驱动灵巧手指结构设计及其运动分析与试验》,方正证券研究所
灵巧手腱绳材料主要包括高分子材料和不锈钢材料:
高分子材料(超高分子量聚乙烯纤维/UHMWPE)综合性能相对较强,应用更多,但成本相对较高。包括Dyneema和 Spectra两类材料,其兼具长寿命(高强度、耐磨损/腐蚀)、重量低等优势,但成本较高,且易发生形变。领先的材料供应商包括荷兰DSM、美国Honeywell等。
不锈钢材料性能相对偏弱,技术工艺提升后有望广泛应用于机器人领域。历史上不锈钢腱绳成本相对较低,但存在寿命较低、安全性差等缺陷,在灵巧手中的应用相对较少。而以大业股份为代表的厂商正积极研发超高强度、超高扭转、超高延伸为特点的特种钢丝材料,有望于灵巧手中得到广泛应用。
图:灵巧手主流腱绳材料性能对比
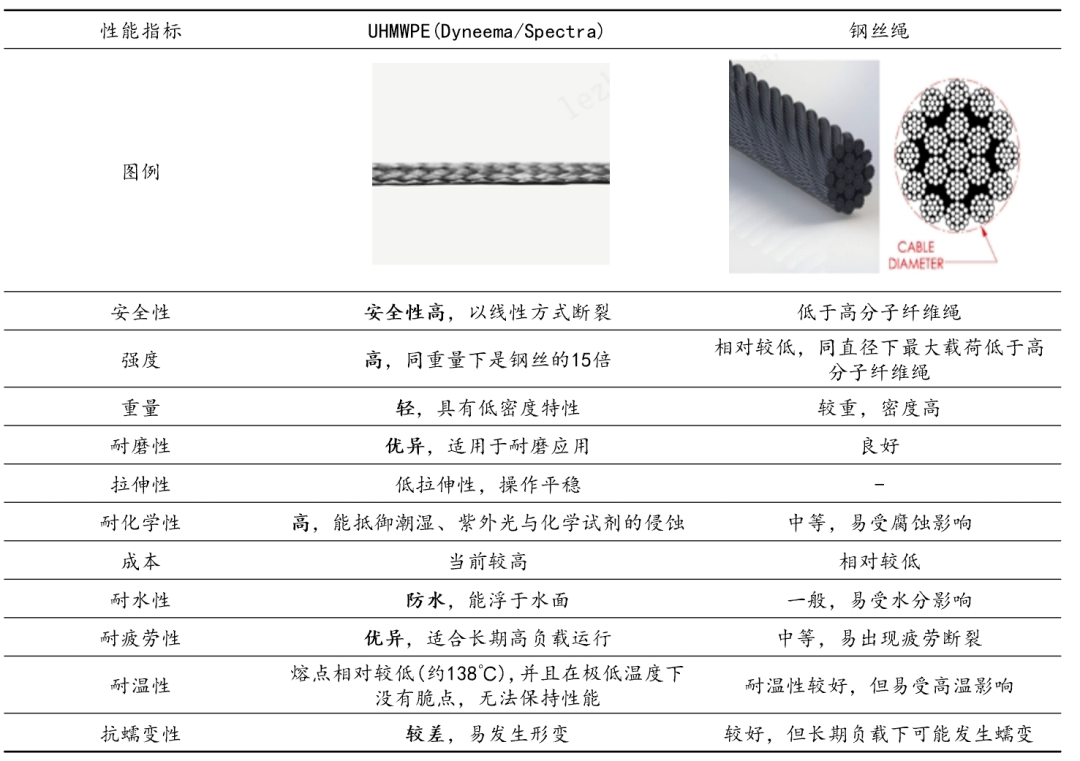
资料来源:李柏毅《腱传动灵巧手指的传动分析与结构设计》,贝泽精密公司官网,accessropes,方正证券研究所
4.3.3 丝杠/减速器传动:手部传动新方向,产业进程持续推进
行星滚柱丝杠兼具高承载、高精度、长寿命、小体积等优势,非常契合人形机器人场景应用,但降本诉求迫切。根据滑动方式不同,丝杠可分为梯形丝杠、滚珠丝杠、行星滚柱丝杠,其中行星滚柱丝杠在主丝杠周围放置若干行星滚子,在作业过程中显著提升受力面积,因此兼具高承载、高精度、高效率、高可靠性、小体积等优势,在空间紧凑的人形机器人上或广泛应用。但其产业化进程尚需推进,在生产效率、成本等方面亟待优化。近年来,贝斯特、北特科技、五洲新春、双林股份等厂商积极布局丝杠业务,加速其产业化落地。
图:三类丝杠性能对比
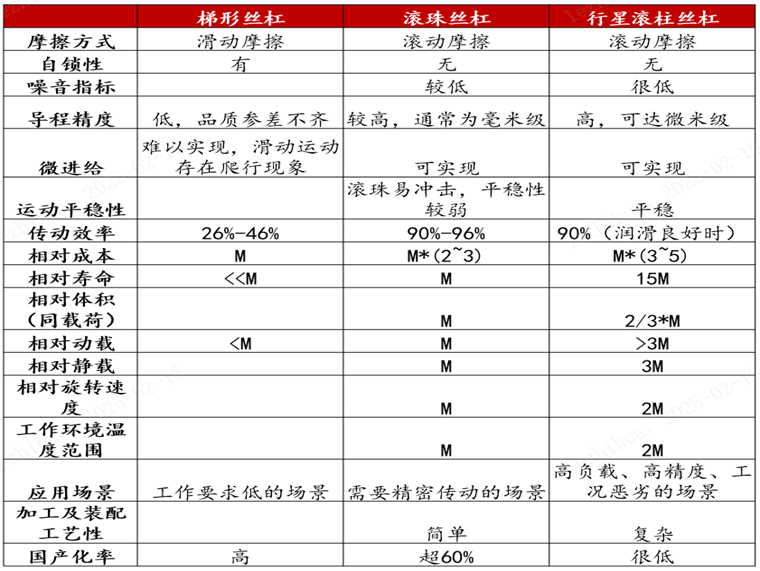
图:国内外厂商积极围绕丝杠进行布局
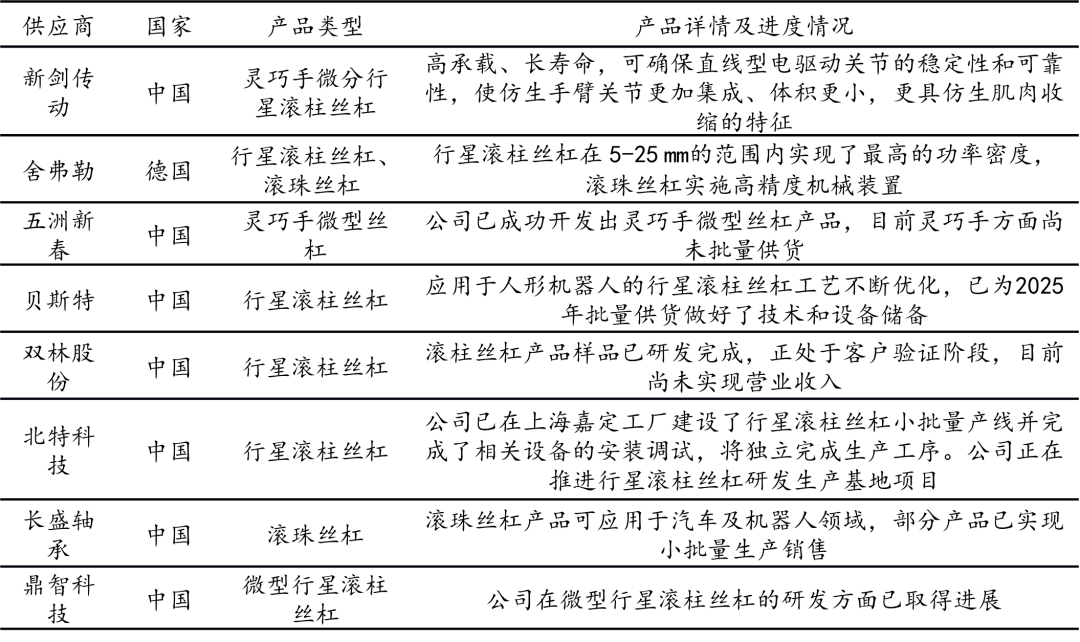
资料来源:《行星滚柱丝杠电动缸应用现状》等,新剑传动公众号,舍弗勒公司官网,各公司公告,方正证券研究所,注:表中“M”为便于对比的相对指标
微型谐波减速器精度较高、减速比大(可助力增加输出扭矩),但技术成熟度相对较低,行业领先企业已纷纷入局。相较于齿轮、行星减速器等方案,其精度高、体积小、减速比大,但技术成熟度相对较低,产业亟待进一步成熟以实现降本。边际上,哈默纳科、绿的谐波等谐波减速器领先企业正积极加码微型谐波减速器的相关研发,绿的谐波已推出针对手指关节的6mm外径谐波减速器;哈默纳科于2023年东京国际机器人展览会展出搭载微型谐波减速器的灵巧手方案,直径低至5mm。
图:减速器类别及各自特点
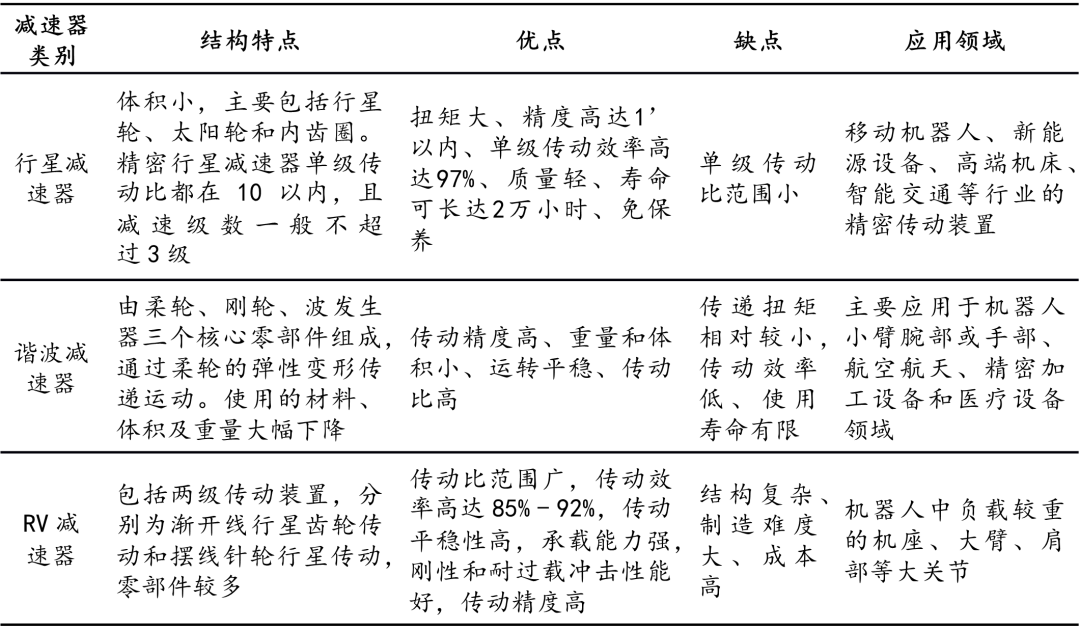
图:谐波减速器重要供应商概览
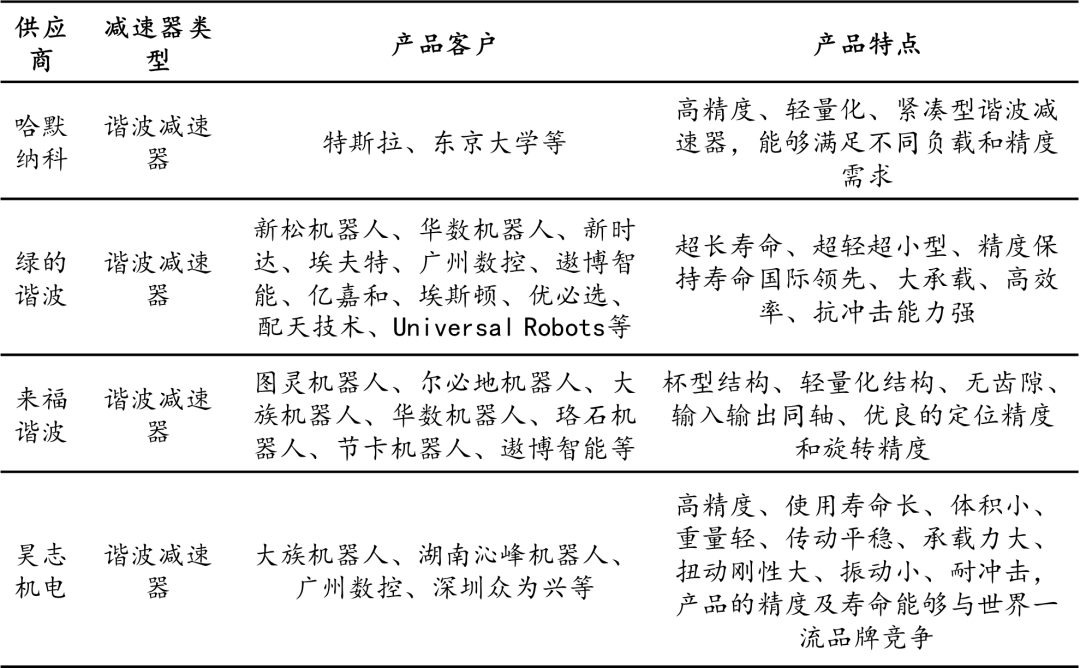
资料来源:哈默纳科官网,各公司公告等,方正证券研究所
4.4 感知系统:灵巧手智能化的重要基础,产业发展迈入快车道
内部传感器用于感知灵巧手自身状态,包括力矩/位置/弯曲传感器。力矩传感器用于感知关节扭矩以对抓取力度大小进行更精准的掌控;位置传感器多采用编码器、霍尔效应传感器;弯曲传感器用于感知关节的转动角度,提升灵巧手运动的控制精度。
外部传感器用于感知外界环境,包括接近觉/触觉传感器。接近觉传感器用于在触碰之前感知物件与灵巧手的相对位置,而触觉传感器用于感知物件反作用力、质地、温度等信息。
图:灵巧手的感知系统概览
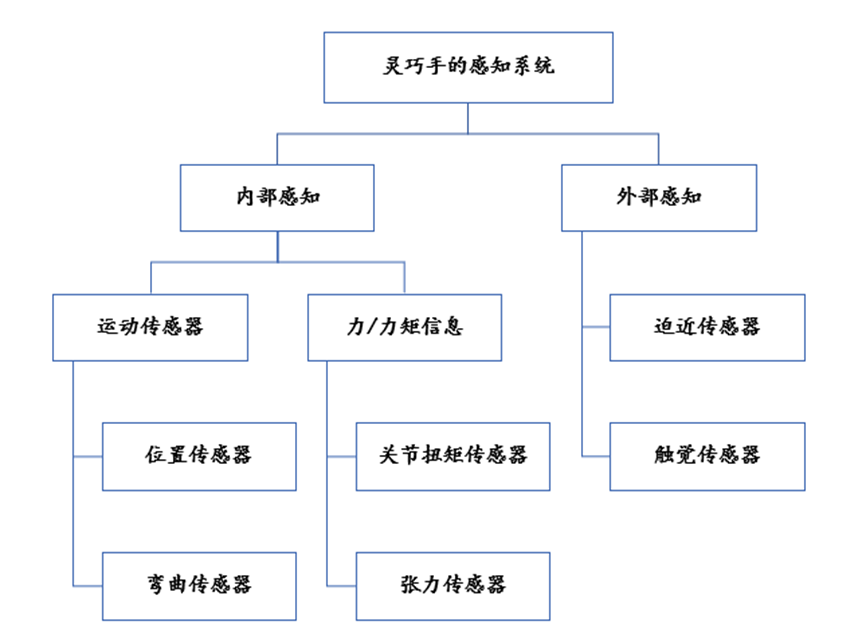
资料来源:高工机器人产业研究所(GGII),方正证券研究所
4.4.1 力传感器:技术逐步走向成熟,多用于指尖、腕部等
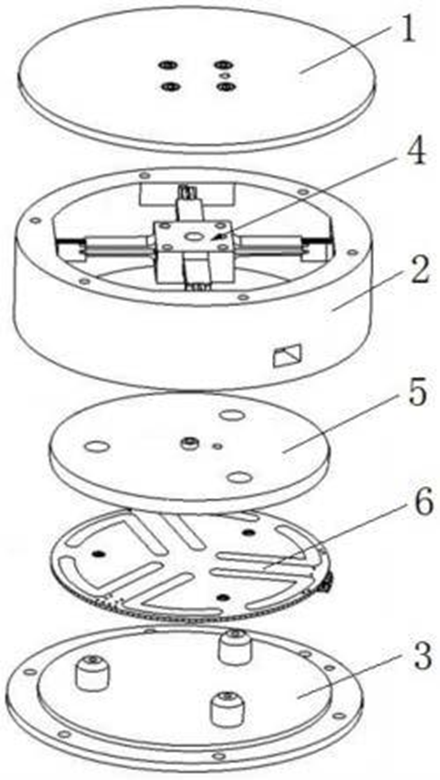
力传感器助力力控精度提升,可分为一至六维力传感器。力传感器用于将测量得到的力矩转化为电信号,可感知张力、压力、重量、扭矩等力学量,提升力控精确度。按测量方向的数量,可分为一至六维力传感器。其中六维力传感器可同时测量三个轴向力及三个轴向力矩,性能最优但制备壁垒、定价最高,在人形机器人中多用于手腕、脚踝处,而一维力传感器多用于内部关节处。
六维力传感器广泛用于汽车、航空航天等领域,可为机器人提供更精准的力感信息,提升其柔顺控制水平。力传感器是将力的量值转换为电信号的器件。根据感力原件的不同,传感器可分为应变式/光学式/压电/电容式力传感器,目前市场主要应用应变式方案,其他方案有一定理论研究,但尚未广泛应用。六维力传感器壁垒最高,性能最优异。目前六维力/力矩传感器主要应用于机器人、汽车、航空航天、生物医学等领域。六维力/力矩传感器或应用于人形机器人的手、足部位,为机器人的力控制和运动控制提供力感信息,助力其提升柔顺化、智能化控制水平。从长周期维度来看,随着算法迭代优化,六维力传感器在人形机器人上的用量或存在一定分歧,但我们认为在短期层面六维力传感器仍将是机器人的重要组成部分。
图:六维力/力矩传感器在机器人领域的应用
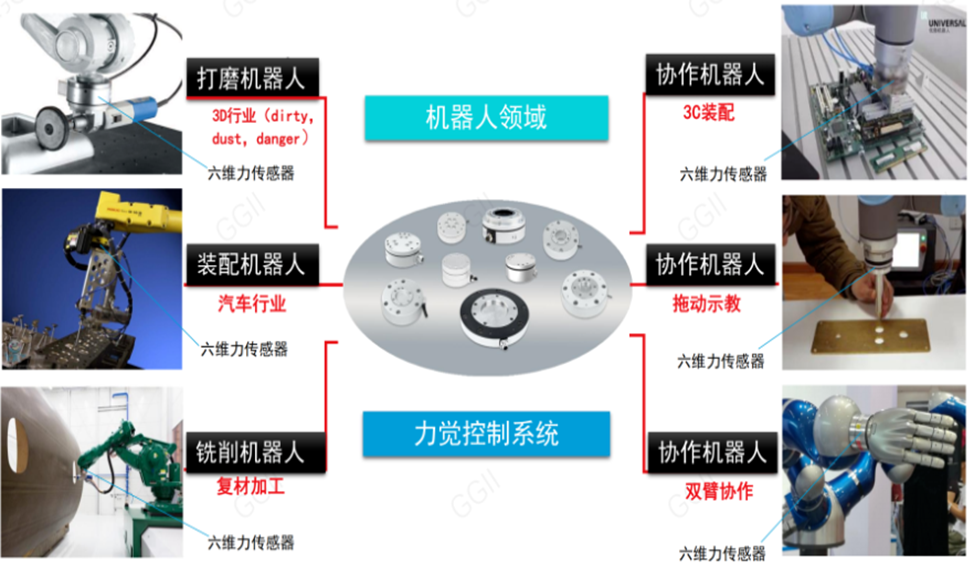
资料来源:高工机器人产业研究所(GGII),方正证券研究所
我国六维力传感器市场规模较小,未来或维持高增。根据GGII,2022年我国六维力/力矩传感器市场规模同比增52%至2.39亿元,其中来自机器人的需求规模达1.56亿元。未来随着应用领域拓展叠加入局者增加,预计到2027年,我国六维力/力矩传感器市场将以超45%的CAGR增至超15亿元,产品矩阵及单价或进一步优化。
六维力传感器壁垒高,主要由海外主导,国内如坤维科技等企业积极发展。受限于高壁垒,目前六维力/力矩传感器市场仍由ATI、ROBOTOUS等海外企业主导,国内具备批量产品供应的企业较少,国内企业主要包括坤维科技、鑫精诚、宇立仪器、蓝点触控、海伯森、昊志机电等。其中宇立产品主要应用于机器人磨抛、汽车碰撞测试等领域,坤维科技在协作机器人、医疗手术机器人、航空航天等领域具备优势,鑫精诚以苹果供应链身份将其产品推广至3C,在机器人、医疗行业也有布局。其他如柯力传感、东华测试等上市公司也在凭借技术积淀积极推进研发及客户送样进程。
图:我国六维力/力矩传感器市场规模预计维持高增

图:2022年我国六维力传感器竞争格局(以销量划分)
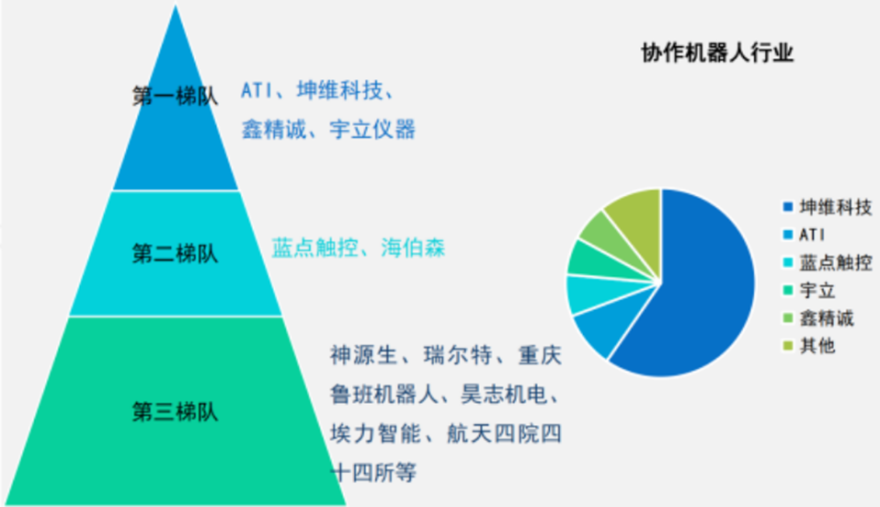
资料来源:高工机器人产业研究所(GGII),方正证券研究所
4.4.2 触觉传感器:已有少量应用,产业进程迈入快车道
电子皮肤从泛用性及仿生性角度可能是机器人触觉的终极方案。柔性触觉传感器由柔性材料制成,具备良好延展性、柔韧性,结构形式多样,在医疗电子、机器人、3C等领域具良好应用前景。根据感知原理的差异,柔性触觉传感器可分为电容式/压阻式/光电式/压电式/磁敏式/超声式传感器,其中电容式/压阻式/压电式传感器应用较为广泛。电子皮肤可实现温度、湿度、压力等多功能感知能力,是触觉传感器的“升级版”。在特斯拉第二代Optimus机器人的宣传视频中,其灵巧手搭载触觉传感器,完成精准捏住鸡蛋的操作。未来Optimus机器人手指、面部等部位或搭载电子皮肤以获得更优秀的感知交互能力。
国内外企业及院校均积极开展电子皮肤相关研究,其产业化进程或迈入快车道。根据汉威科技公众号,预计2021-2028年全球柔性传感器市场规模年复合增速达6.8%,2028年可达84.7亿美元。目前MIT、清华大学等科研院校积极就柔性传感器、电子皮肤开展相关研究,国内如能斯达、三三智能均有产品落地。
图:Optimus-Gen2手指均内置触觉传感器

图:柔性触觉传感器各敏感机理优缺点对比
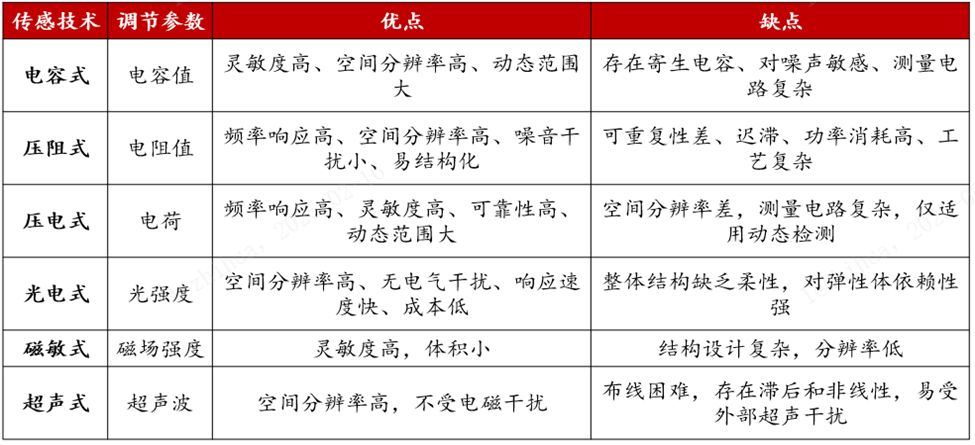
资料来源:特斯拉官方媒体,《柔性触觉传感器在机器人上的应用综述》,方正证券研究所
机器人本体:小鹏汽车、小米集团、BYD、比亚迪电子、广汽集团、优必选
AI基础设施/互联网巨头入局具身智能:阿里巴巴、腾讯集团
电机:鸣志电器、兆威机电、雷赛智能、鼎智科技、拓邦股份、伟创电气、禾川科技、步科股份;
传感器:柯力传感、芯动联科、东华测试、华依科技、安培龙、敏芯股份、华培动力、汉威科技、奥比中光。
优质机器人核心龙头与低位转型汽车零部件标的:银轮股份、均胜电子、爱柯迪、无锡振华、恒帅股份、新泉股份、旭升
国产机器人产业链感知系统核心环节:地平线机器人、速腾聚创、瑞芯微、全志科技、奥比中光、欧菲光、韦尔股份。
减速器:绿的谐波、双环传动、斯菱股份、中大力德、豪能股份、国茂股份;
丝杠:恒立液压、北特科技、贝斯特、五洲新春、震裕科技、双林股份;
1.人形机器人终端应用落地不及预期
2.人形机器人核心部件降本进程不及预期
3.机器人大小脑训练进程不及预期

 VIP复盘网
VIP复盘网
