

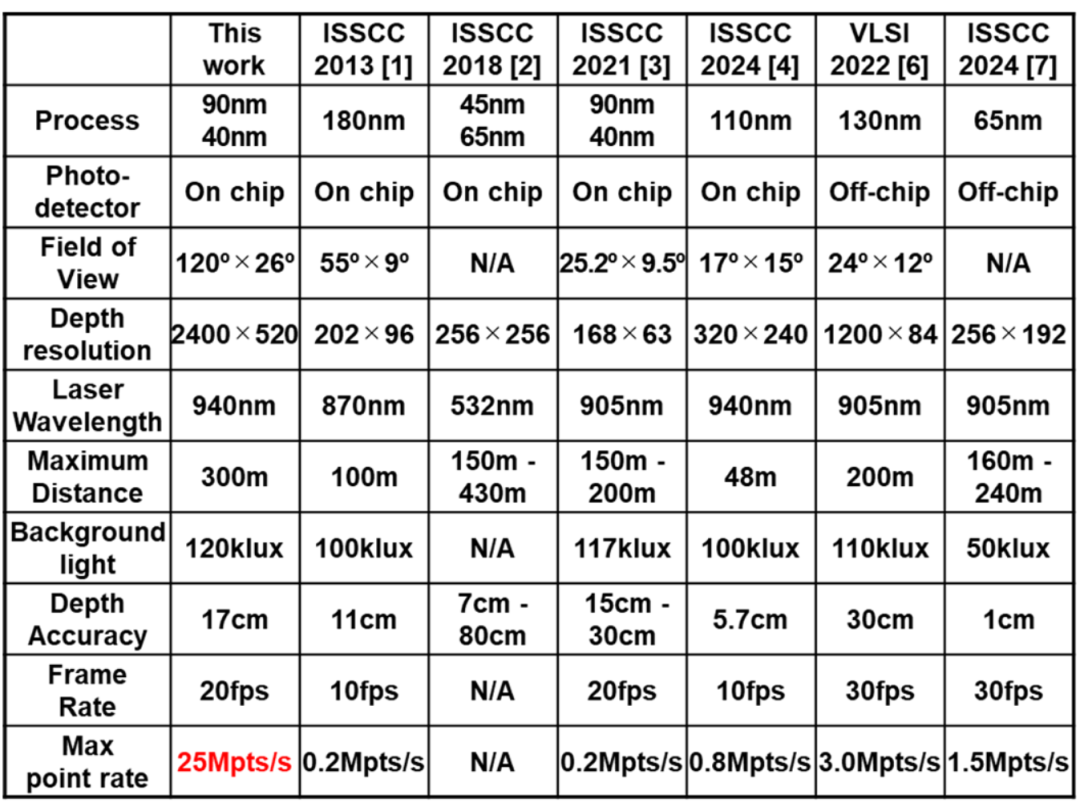
在刚刚结束的VLSI大会上,索尼发表了两篇激光雷达的论文,一篇主要说PDE提高到42.5%,大幅度提高信噪比。另一篇是讲点频即每秒点数量大幅度提升,索尼做到了每秒2500万点频,这个参数是某主流ADAS 512线激光雷达旗舰产品点频的两倍略多一点。
激光雷达测距是通过测量发射光经障碍物返回激光雷达的飞行时间计算障碍物距离,通过扫描手段覆盖不同方位从而获取一系列距离点,感知周围环境。在实际应用中,接收端主要面临的问题是环境光噪音,这就要求在噪音中对信号的甄别能力,提高信噪比。信噪比直接决定了信号的质量,将直接影响激光雷达点云的像素数、噪点数等点云质量指标。激光雷达系统的信噪比是衡量系统性能的最重要的指标和参数。
SPAD激光雷达信噪比示意图
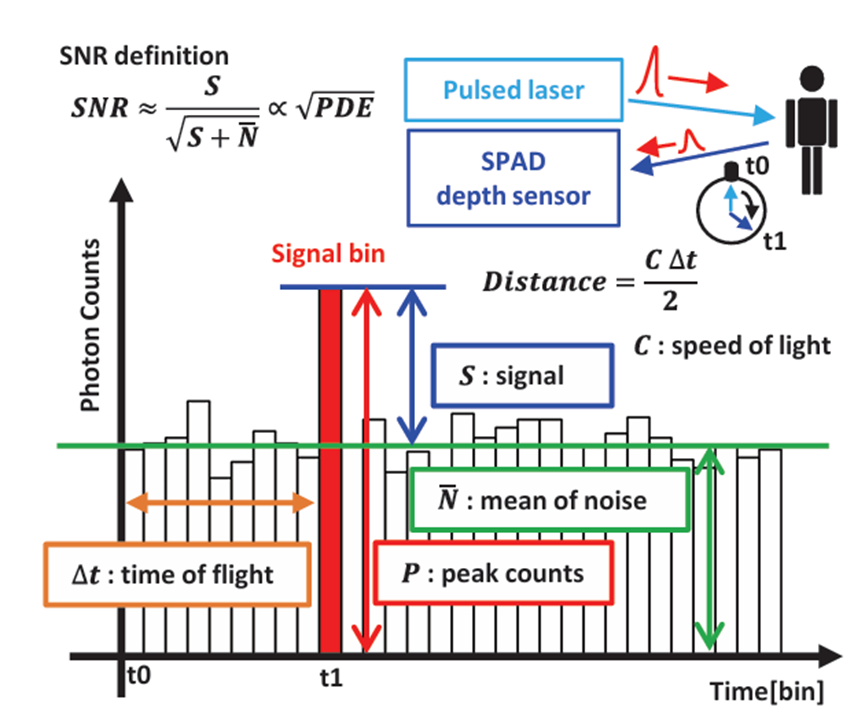
图片来源:索尼论文《A Back-Illuminated 10 μm-Pitch SPAD Depth Sensor with 42.5% PDE at 940 nm using an Optimized Doping Design》。

基于SiPM和SPAD的激光雷达的信噪比方程

基于SiPM和SPAD的激光雷达的最大探测方程
PDE是与SNR (信噪比)的平方成正比,也就是说,PDE从2%增长到32%,增长了16倍时,SNR增长了4倍,有效探测距离也因此增长了2倍;但PDE从30%增长到60%,只增长了2倍,SNR增长了1.4倍(根号2),距离的变化则只有1.2(根号1.414)了,提升有限。
量子效率、信噪比和PDE(光子检测效率)是评估光电探测器性能的关键指标。量子效率指的是光子被探测器转换为电子信号的效率,信噪比则是信号强度与噪声强度的比值,而PDE是探测器对单个光子的响应概率。
量子效率(QE):
量子效率是指探测器将入射光子转换为可测量信号的电子的比例。它通常用百分比表示,例如,如果一个探测器的量子效率为80%,意味着每100个入射光子中有80个被成功转换为电子信号。量子效率越高,探测器的灵敏度越高,能够探测到的光信号越多。量子效率受材料、工艺和工作条件等多种因素影响。
信噪比(SNR):
信噪比是指信号强度与噪声强度的比值,是衡量图像或信号质量的重要指标,信噪比越高,表示信号相对于噪声的强度越大,图像或信号越清晰,越容易进行分析和处理。信噪比通常用分贝(dB)表示,计算公式为SNR (dB) = 10 * log10 (信号功率/ 噪声功率),在光电探测器中,信噪比反映了探测器能够区分有用信号和噪声的能力。
光子检测效率(PDE):
光子检测效率(PDE) 是指探测器在给定波长下,检测到一个光子的概率。它通常用于描述单光子探测器(SPAD) 的性能。PDE 受到暗计数率、串扰等因素的影响,也与探测器的材料、工艺和工作条件有关。PDE 通常用百分比表示,例如,如果一个SPAD 的PDE 为50%,意味着它有50% 的概率在接收到一个光子时产生一个有效的输出信号。
初期SPAD的PDE比较低,因此主要做短距离的补盲雷达,近似于角雷达,不过近期情况大为改善,2021年索尼的IMX459在905纳米下PDE达到24%的效率,最远检测距离达到了300米,可以做远距离激光雷达。2025年6月初发布的IMX479在940纳米下PDE达到37%的效率,而索尼的下一代产品PDE达到42.5%。
图片来源:索尼
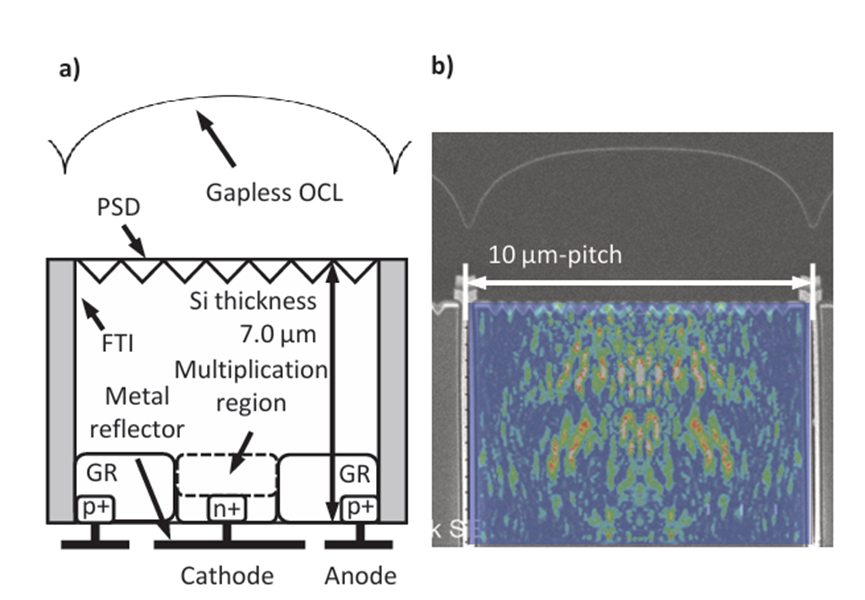
PDE可以表示为三个因素的乘积:QE、电荷收集效率(CE)和触发概率(TP)。QE是由器件的物理结构决定的,通过无间隙OCL(On chip lens)和PSD(pyramid surface for diffraction)将其最大化。 CE表示硅区产生的电子向倍增区转移的效率,和掺杂设计相关,这里采用重参杂。在保护环(GR)区域引入新的p型掺杂到硅表面,有望将表面附近的转换电子转移到倍增区。 TP表示单个电子在倍增区引起盖革模式的概率,必须在倍增区引入更高的电场来产生电子。倍增区面积减少50%,防止DCR因电场增加而恶化。
Sony研究优化掺杂设计实现具有暗计数率(DCR)的高PDE深度测量,开发的芯片如图所示。采用10 μm间距的二维阵列,顶层为SPAD像素,底层为无源读出电路。每个像素通过Cu-Cu键合电连接,使单独信号读出。 SPAD像元包括7 μm厚的硅、金属反射器和为提高光量子效率(QE)而引入的衍射金字塔面(PSD)结构。采用嵌入金属的全沟槽隔离(FTI)来防止光子串扰。
三种结构的PDE在940 nm处随偏压曲线如下。
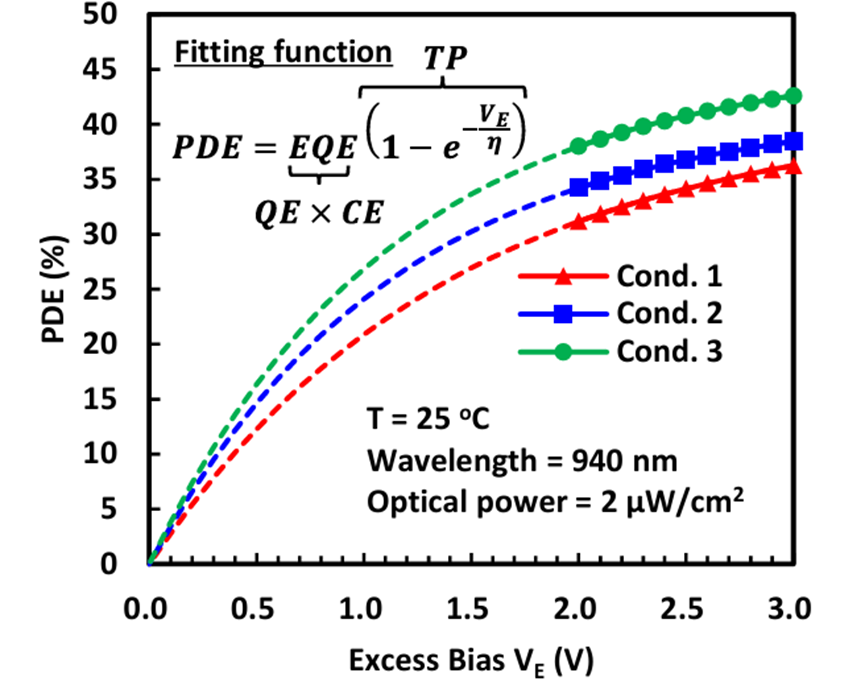
Cond. 3在整个近红外区域都有较高的PDE, 940 nm处为42.5%,905 nm处为51.0%,850 nm处为63.4%。Cond. 3在所有温度下都表现出轻微的DCR恶化,但对于dToF测量可以忽略不计。
索尼1250万点频SPAD传感器激光雷达深度图像
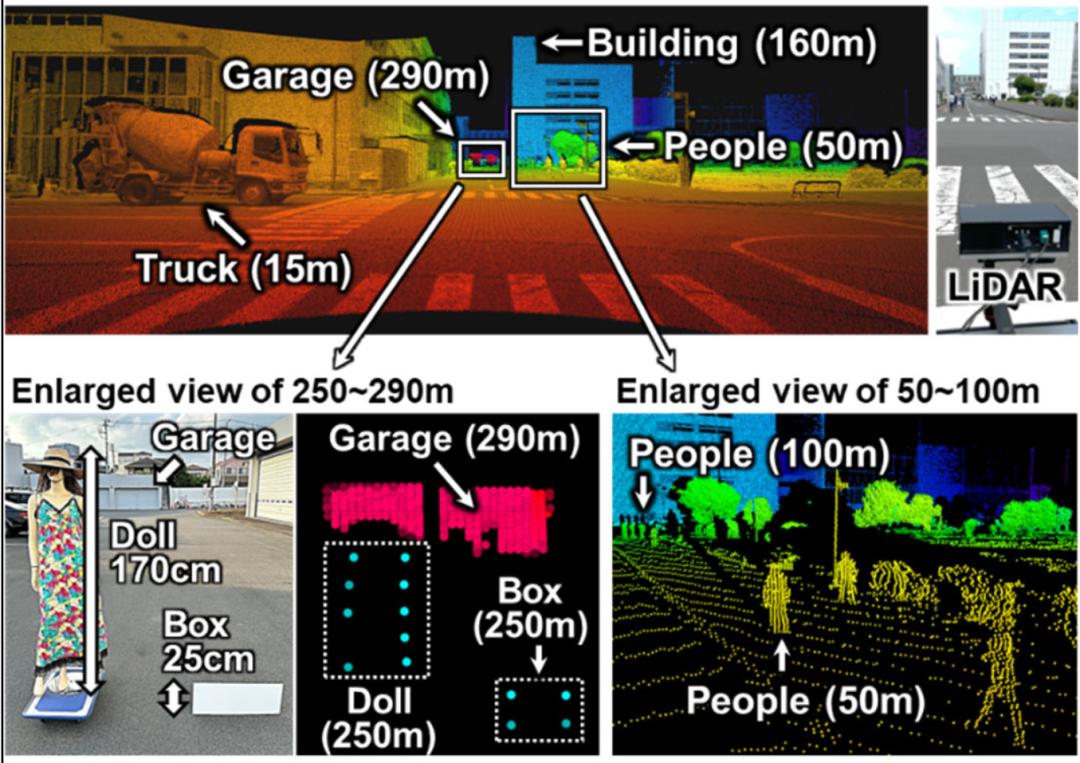
图片来源:索尼论文《A 25M points/s Back-Illuminated Stacked SPAD Direct Time-of-Flight Depth Sensor with Equivalent Time Sampling for Automotive LiDAR》
索尼SPAD芯片与激光雷达参数
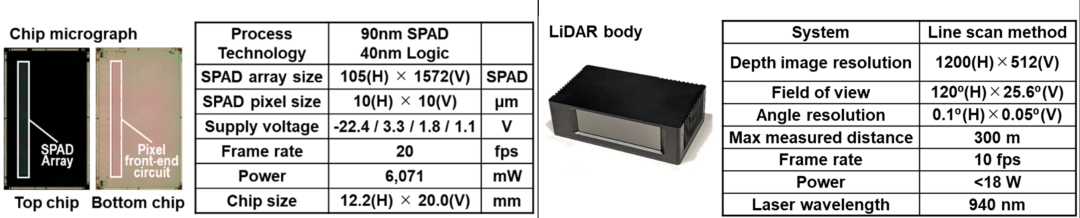
图片来源:索尼
SPAD芯片的帧率是20Hz,而激光雷达的帧率下降了一半,只有10Hz,也就是说激光雷达只发挥了传感器芯片一半的性能,这是激光雷达的一个矛盾,那就是角分辨率与帧率,这是扫描型激光雷达的天然缺陷,要高帧率,自然要高转速,角分辨率就低,而摄像头的帧率一般是20-30Hz,比激光雷达高不少,导致融合有难度,有些为了较高的角分辨率,会把帧率降低到5Hz。
图片来源:索尼
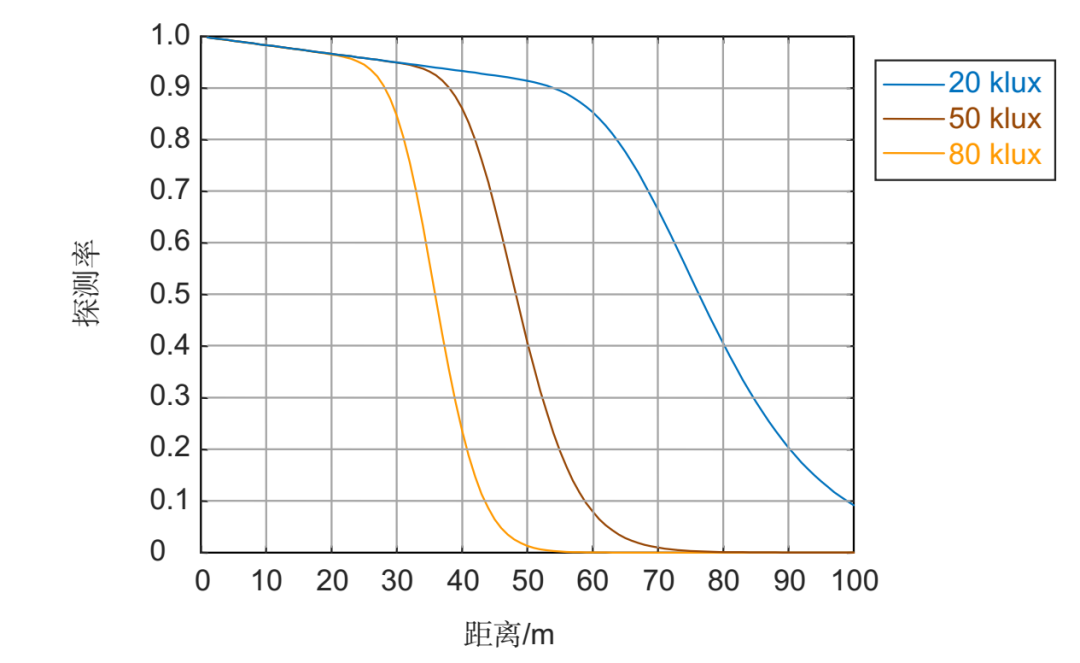
环境光会对激光雷达产生干扰,光强度越高,干扰就越强,反之干扰就越低。环境光产生噪音会降低测距精度和测距距离,也有可能产生漏检或者误检。被动的解决办法一是使用窄带滤光片,只允许特定波长的光通过,减少其他波长的光干扰,二是设置阈值,以此区分环境光和激光信号,降低环境光的影响。然而,外部场景变化莫测,变化范围难以确定,即使在同一场景下,不同的探测角度和测试距离所对应的环境光光强也不一样。因此,使用单一阈值很难对外部环境光强进行准确去噪,三是使用多次回波。
图片来源:2021年10月光电工程期刊文章「SiPM 激光雷达阳光下探测概率性能分析」
当环境光强度从20k lux增加80k lux,有效检测距离大幅度缩水近50%。晴天室外光强度大约30k-300k lux,所以激光雷达在给出有效探测距离参数时不仅要反射率,还要给出环境光强度,国内一般默认的是100klux,非车用激光雷达可以再降低到80甚至60klux。
最佳解决办法就是提高信噪比,高信噪比可以适应比较强的环境光,索尼这个信噪比很高,测试条件是少见的120klux。夜间环境光强度会低到1lux以下,有效距离或许到500米。
传统摄像头是被动元件,可挖掘的潜力有限。激光雷达是主动元件,也是全球光电领域最火热的研发领域,有着广阔的性能挖掘空间和成本下降空间,特别是SPAD领域,所有阻碍激光雷达成为汽车标配的障碍都会被一一解决。

 VIP复盘网
VIP复盘网
