

不是工厂里的机械臂组装零件,而是一群笨拙的小家伙,自己勾连、自己组织、自己变形,最终像一个完整的生命体那样蠕动、绕障、等待同伴。
2026年5月20日,康奈尔大学电气与计算机工程学院Kirstin H. Petersen教授团队在《Science Robotics》上发表了一项颇具颠覆性的研究,第一作者为康奈尔大学电气与计算机工程学院博士、访问讲师Danna Ma。他们提出了Cross-Link Collective(交叉链接集群)系统,不依赖显式计算和通信,把智能嵌入到机器人的形状和物理交互中。
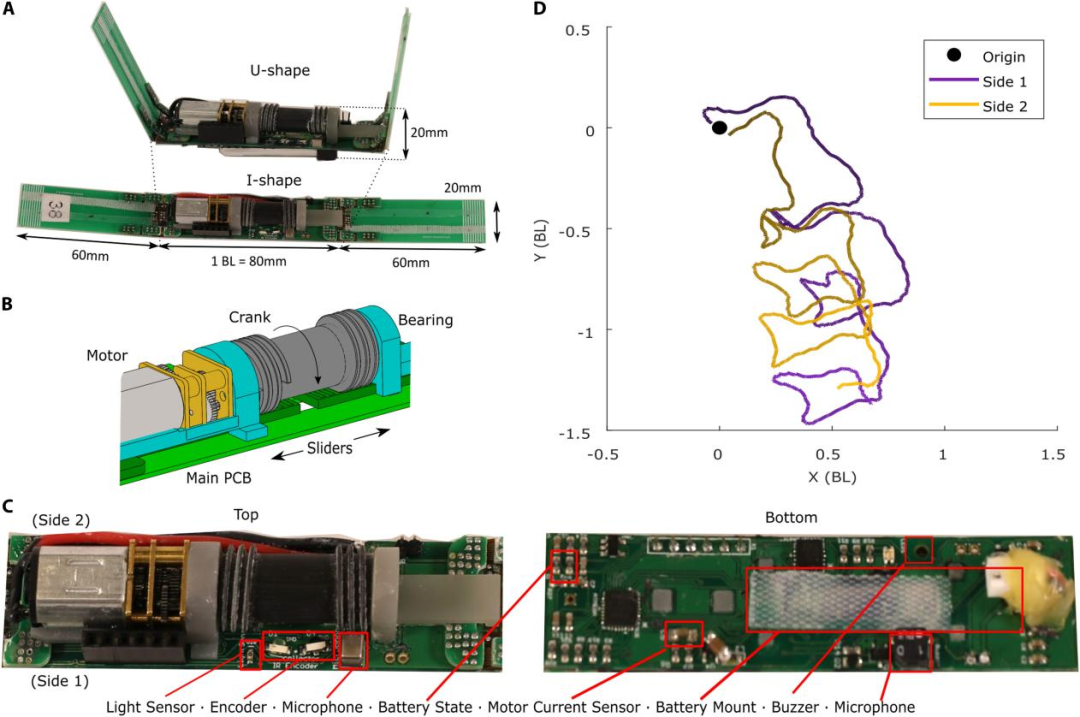
这套系统由数十个仅重25克的小型模块组成。每个模块长200毫米、宽20毫米,只有一个自由度,靠一台微型电机驱动,在直线和U形之间来回切换。
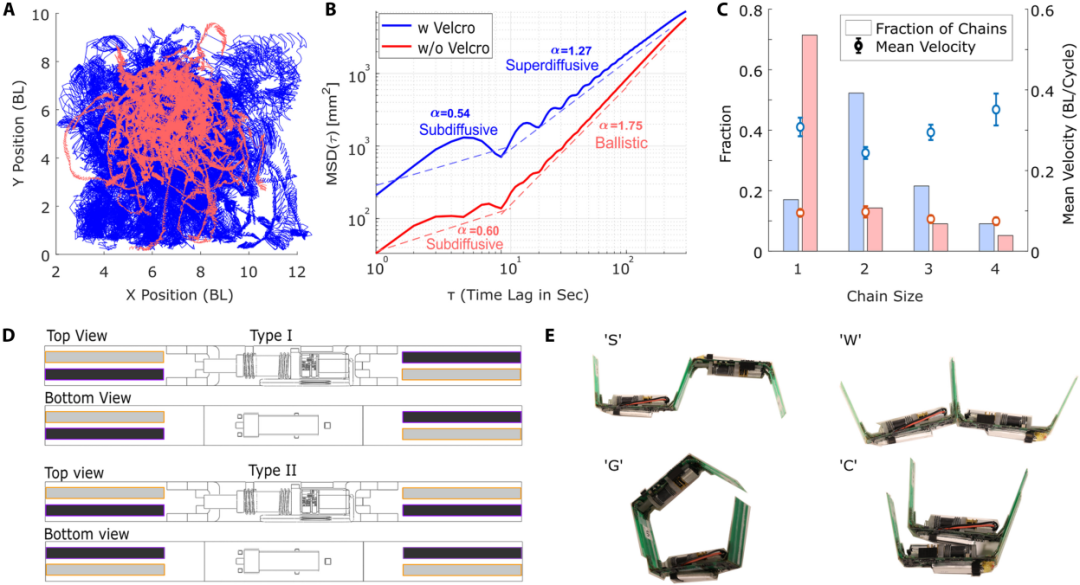
但这只是形变,几乎不产生运动。单个模块摆动180个周期,平均只移动了不到0.25倍体长,约等于原地磨蹭。真正的运动来自模块之间的连接。模块靠形状和运动产生松散的“物理纠缠”,魔术贴则把这种纠缠加固成更牢固的交联。
当多个模块连成链条后,各自的形变才会转化为集体的蠕动。论文称之为“瞬态纠缠”,灵感来自活性凝胶的分子交联机制。换句话说,运动是涌现出来的,不是内置的。
01.
靠什么组队?一根电机 两片魔术贴
先来看看单个的模块长什么样。
每个重25克,伸直了像一根细长的绿色牙签(200毫米长,20毫米宽),蜷起来又像个迷你订书机。体内只有一颗298:1减速比的微型电机,通过蜗轮和曲柄滑块机构驱动两片“翅膀”开合。成本?批量生产时每个只要72美元。
本研究中使用的机器人模块
但但真正让它们能“组队”的,是两片魔术贴。
对,就是你鞋子上那种,轻轻一蹭就能粘住,要扯开却需要更大的力。研究团队把它贴在每片翅膀的外侧。这种设计的妙处在于:建立联系容易,断开则需要决心。
实验结果很直观:没贴魔术贴时,10个模块各自为战,10次实验中平均有55个次是孤立的个体。贴了魔术贴后,同样的10个模块,个体分散的次数骤降到15次,它们开始自发组队了。
02.
S形、W形、G形……机器人自然连接时,哪种姿势最“香”?
两个模块连在一起,能摆出四种姿势。
S形:像条小蛇,蜿蜒前行;W形:像个波浪,两头翘;G形:像个回形针,弯成圈;C形:双C嵌套,抱在一起。
但哪种会自然发生得最多?研究团队做了一个实验:把模块放在一起,让它们自由互动,不加任何人为干预,然后用计算机视觉追踪记录。
结果很明确:S形是绝对的主流,20次双模块连接里出现了13次,占比高达65%。W形只有4次,G形3次,C形干脆没出现。
为什么S形这么受欢迎?
这不是谁设计的,是物理规则自己筛出来的,答案藏在力学里。团队用抗力理论(Resistive Force Theory)建模计算发现,W形连接时,魔术贴关节承受的峰值扭矩远高于S形。简单说,W形费关节,容易断;S形省力,更稳当。而且S形还能像蛇一样产生推进波,走得更快。
03.
故障变神操作,相位漂移的自适应魔法
研究团队在观察S形双模块链条时,还发现了一个反直觉的现象。
所有模块启动时都是同步的,收到一个声音信号,大家一起摆动。但跑着跑着,它们之间的步调就乱了,出现了相位差。按常理,这叫“失步”,是故障。但团队发现,这恰恰是系统在自救。
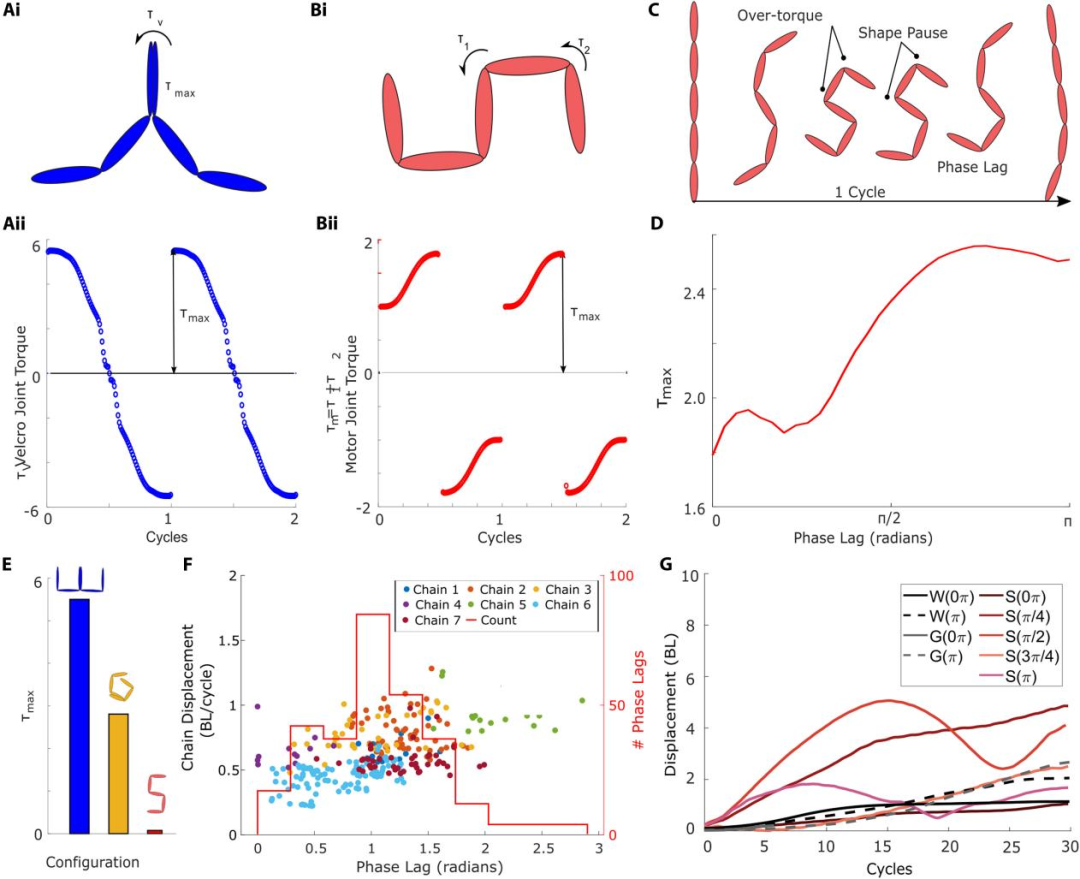
原因很简单,当两个模块完全同步时,它们会同时发力、同时受力,电机扭矩瞬间飙到极限,触发过载保护,强制暂停2秒。这2秒一停,后面那个模块就“掉队”了,相位差反而被拉大到约60度。而模型计算发现,60度的相位差,恰好是电机最省力的状态。扭矩降下来了,运动反而更顺了。
换句话说,系统用一种看起来像故障的方式,自动找到了最优节奏。这不是人教的,是物理规则逼出来的。研究团队指出,大自然早就玩明白了这招——蛇游泳、鱼群游动,都靠这种错开的步调来减少内耗。
从“强迫同步”到“刻意不同步”,这些小模块学会了用不完美来换取更优解。这大概就是机械智能的精髓:不是去控制每一个细节,而是设计好物理规则,让有用的行为自己冒出来。
04.
一个“用机器人做出来的机器人”如何生存?
现在,换一个角度看这堆小模块:它们就是那个“被造出来的机器人”。
这个机器人在复杂环境里的表现也很惊人,像一条用无数小零件拼出来的蠕动小虫,碰到障碍会自动改变形态来通过狭窄。
在5度斜坡上,单个模块很容易原地打滑。但一旦连成链,这个“机器人个体”会自己旋转、调整方向。数据显示,单个模块有25%的概率几乎原地踏步,而链条的最低速度也在0.848体长/周期以上。
遇到障碍物时更绝。研究人员在平面上摆了三排圆柱障碍,间距比模块伸直的长度还窄一点,理论上很容易卡住。结果呢?链条遇到障碍时会主动断裂,像液体一样分流绕过,过去之后再重新连接。团队管这叫“粘弹性行为”:平时像有弹性的固体保持凝聚力,受压时像液体一样流动。没有中央指挥,没有路径规划,纯粹靠物理交互就实现了“遇硬则散、过隙则聚”。
还有一个暖心的小设计:如果某个模块掉队了,它会发出一种低频“求救声”,通过蜂鸣器-麦克风来实现,附近的模块听到后会放慢脚步等它。
05.
规模密度可以调,4%坏了也不怕
研究团队试了不同规模的集群:5个、10个、15个、20个。
结果发现,10个是最佳平衡点。5个时链条太少,集体优势不明显;15个和20个时,密度太高,碰撞和拥堵反而拖慢整体速度。
但需要说明:这个“10个”不是绝对真理,而是在1.2m×1.2m白板上的最优密度。这组实验的真正目的是找出一个可调节的密度参数,而不是宣称“10就是最优数字”。密度太低,链条太少;密度太高,碰撞和拥堵反而拖慢整体速度。
另一个让人安心的数据是容错率。在所有斜坡实验中,650个模块里约有29个(4%)因为电池耗尽或硬件小故障停止了运动。但集体表现几乎不受影响,坏掉的模块要么被链条“捎带”着走,要么静静留在原地,不会拖累其他人。
06.
当机器人学会“放手”
传统机器人追求精确控制,每个关节的角度、每条路径的坐标,都要算得清清楚楚。但Cross-Link Collective走了一条相反的路,放弃精确控制,拥抱随机性。魔术贴的临时连接、相位差的自然漂移、链条的自发断裂与重组,这些不可控的元素,恰恰构成了系统的韧性。
这不只是机器人技术的进步,也是一种思维方式的启示:有时候,设计一套好规则,比控制每一个结果更重要。让物理世界自己说话,让涌现行为替你解决问题,这或许就是机械智能给未来机器人最珍贵的礼物。

 VIP复盘网
VIP复盘网
